
机械修整装置及修整方法.pdf

努力****绮亦


1/9

2/9
3/9

4/9

5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械修整装置及修整方法.pdf
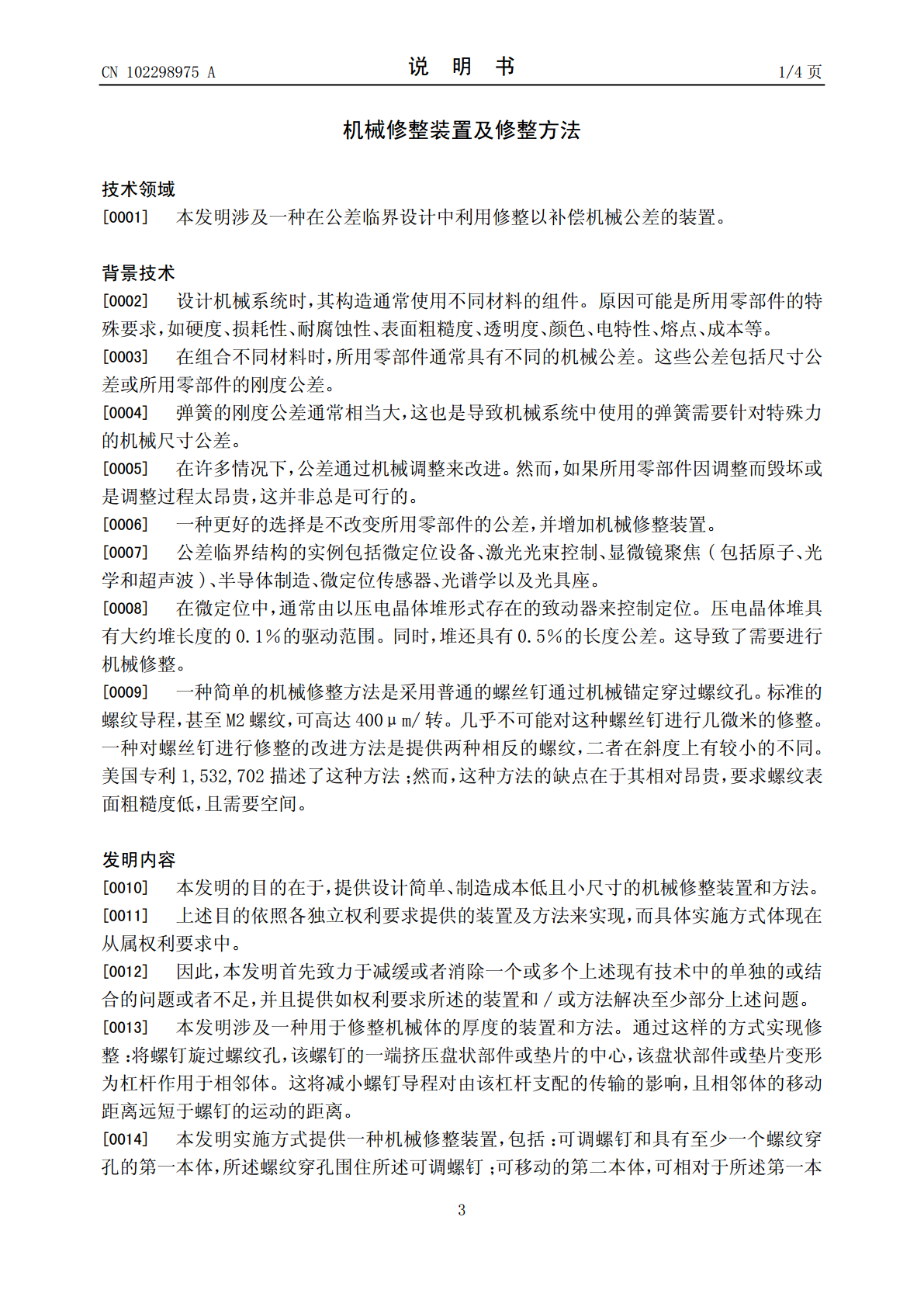
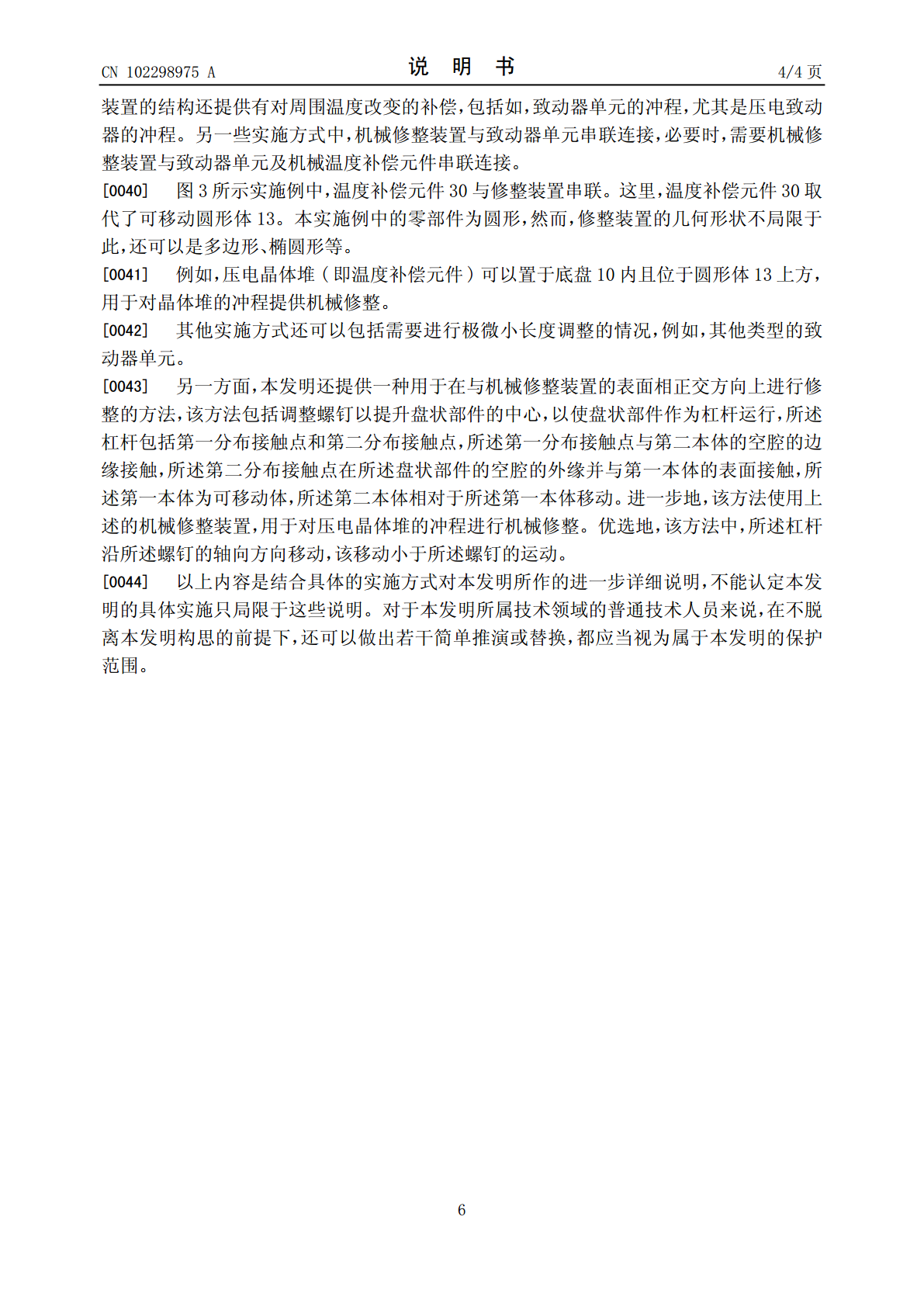
本发明涉及一种修整机械体厚度的装置。其中,修整的实现方式为:将螺钉旋过螺纹孔,该螺钉的一端压挤盘状部件的中心,该盘状部件变形为杠杆作用于相邻体。这将减小螺钉导程对由该杠杆决定的传输的影响。

修整方法及修整装置.pdf
修整装置(1)包括:限制体(13),所述限制体(13)具有与研磨面(6)的形状对应形状的突条部(12)的面,并且使所述面在所需的长度上与旋转的研磨轮(5)的所述研磨面(6)相向接触;喷出研磨颗粒产生装置(11),所述喷出研磨颗粒产生装置(11)作为产生混合有研磨颗粒的压力流体的装置;以及喷出口(15),所述喷出口(15)作为喷射装置,喷出混合有研磨颗粒的压缩空气,所述喷出装置朝研磨面(6)与限制体(13)的突条部(12)的面的相向接触空间,喷射来自喷出研磨颗粒产生装置(11)的作为混合有研磨颗粒的压力流体

修整方法及修整装置.pdf
修整装置(1)包括:限制体(13),所述限制体(13)具有与研磨面(6)的形状对应形状的突条部(12)的面,并且使所述面在所需的长度上与旋转的研磨轮(5)的所述研磨面(6)相向接触;喷出研磨颗粒产生装置(11),所述喷出研磨颗粒产生装置(11)作为产生混合有研磨颗粒的压力流体的装置;以及喷出口(15),所述喷出口(15)作为喷射装置,喷出混合有研磨颗粒的压缩空气,所述喷出装置朝研磨面(6)与限制体(13)的突条部(12)的面的相向接触空间,喷射来自喷出研磨颗粒产生装置(11)的作为混合有研磨颗粒的压力流体
整形修整装置以及整形修整方法.pdf
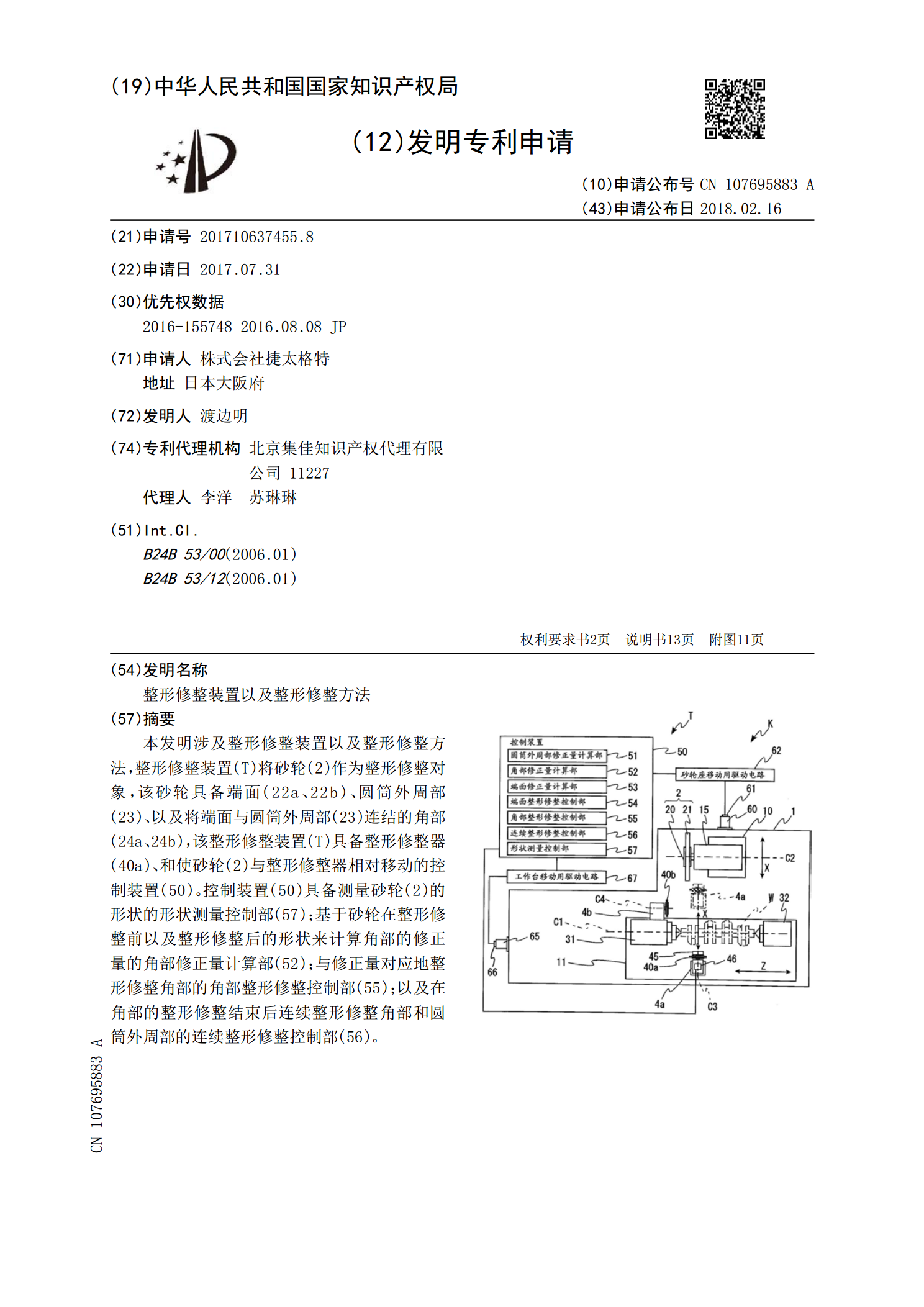
本发明涉及整形修整装置以及整形修整方法,整形修整装置(T)将砂轮(2)作为整形修整对象,该砂轮具备端面(22a、22b)、圆筒外周部(23)、以及将端面与圆筒外周部(23)连结的角部(24a、24b),该整形修整装置(T)具备整形修整器(40a)、和使砂轮(2)与整形修整器相对移动的控制装置(50)。控制装置(50)具备测量砂轮(2)的形状的形状测量控制部(57);基于砂轮在整形修整前以及整形修整后的形状来计算角部的修正量的角部修正量计算部(52);与修正量对应地整形修整角部的角部整形修整控制部(55);
研磨垫的修整方法和修整装置.pdf
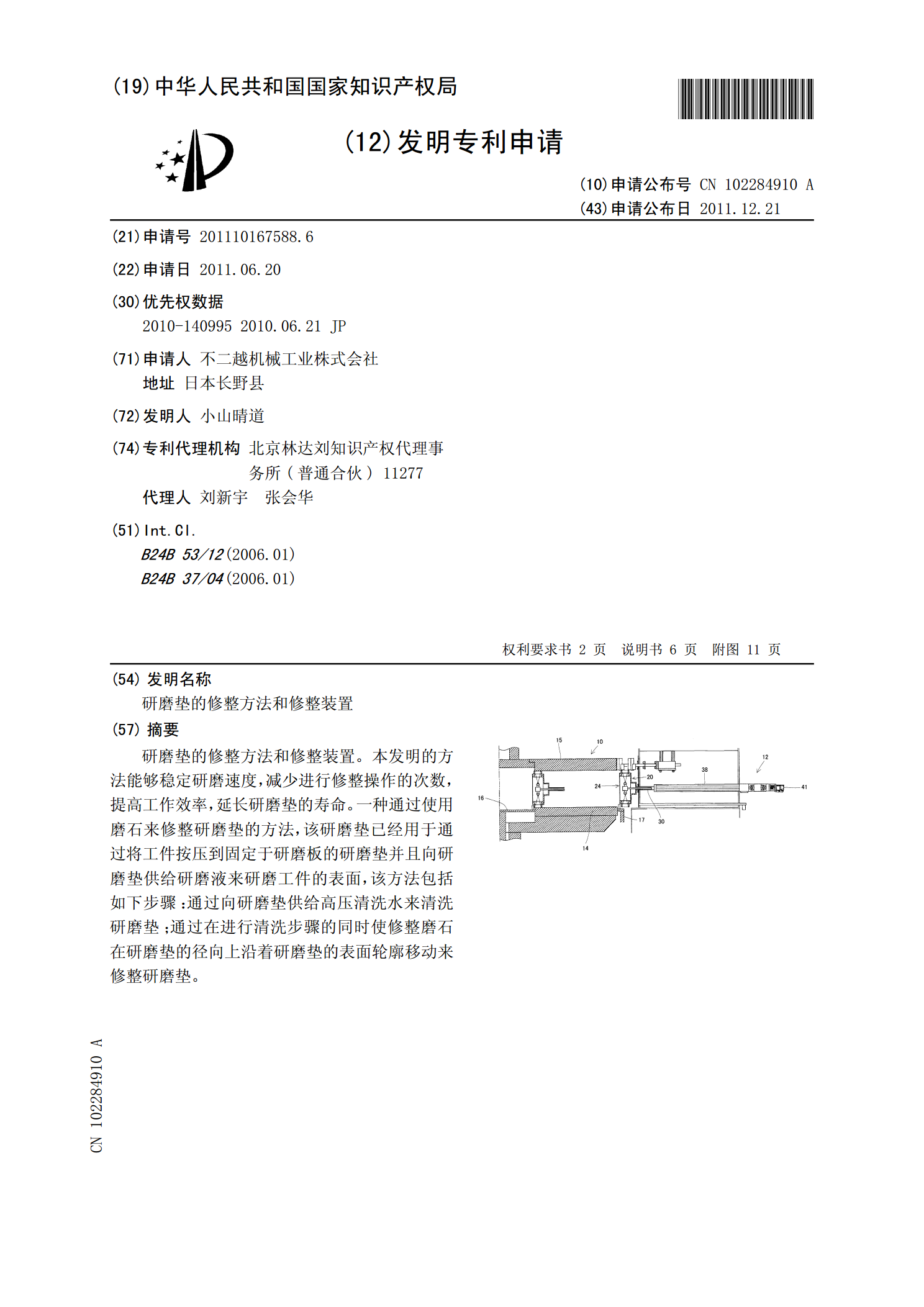
研磨垫的修整方法和修整装置。本发明的方法能够稳定研磨速度,减少进行修整操作的次数,提高工作效率,延长研磨垫的寿命。一种通过使用磨石来修整研磨垫的方法,该研磨垫已经用于通过将工件按压到固定于研磨板的研磨垫并且向研磨垫供给研磨液来研磨工件的表面,该方法包括如下步骤:通过向研磨垫供给高压清洗水来清洗研磨垫;通过在进行清洗步骤的同时使修整磨石在研磨垫的径向上沿着研磨垫的表面轮廓移动来修整研磨垫。