
具有支承悬伸臂的可行驶工作机械.pdf

Ma****57


1/9

2/9
3/9
4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
具有支承悬伸臂的可行驶工作机械.pdf
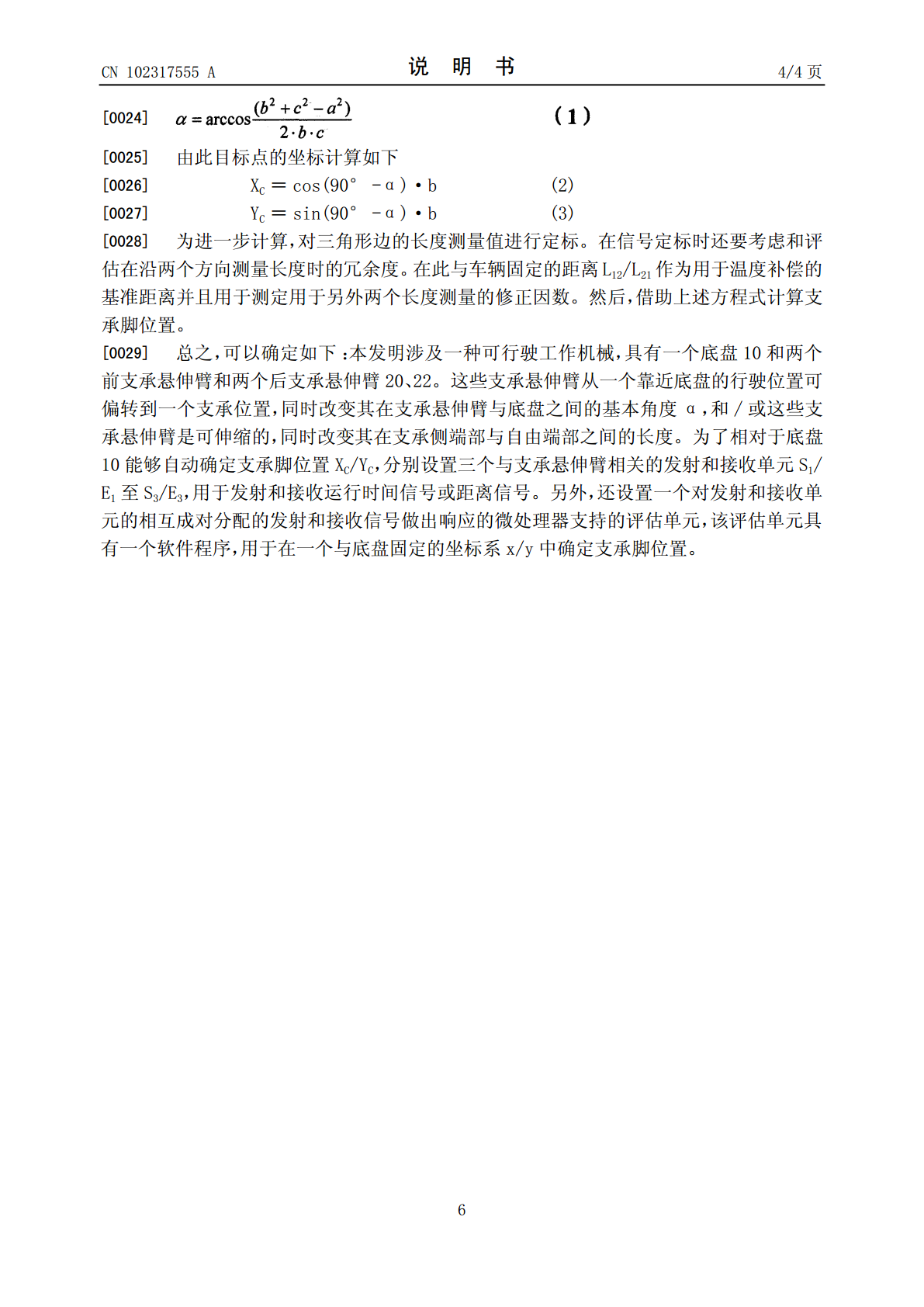
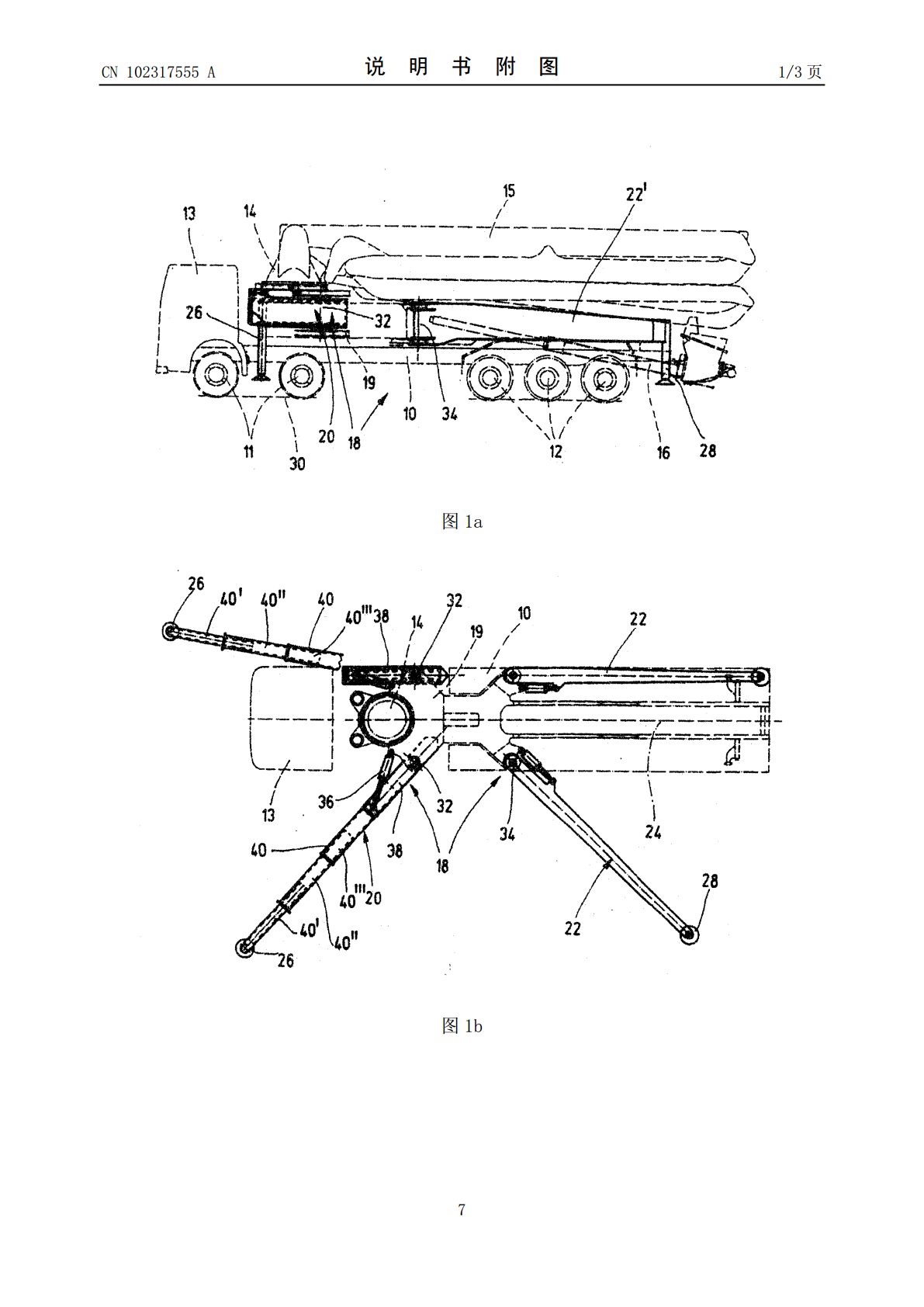
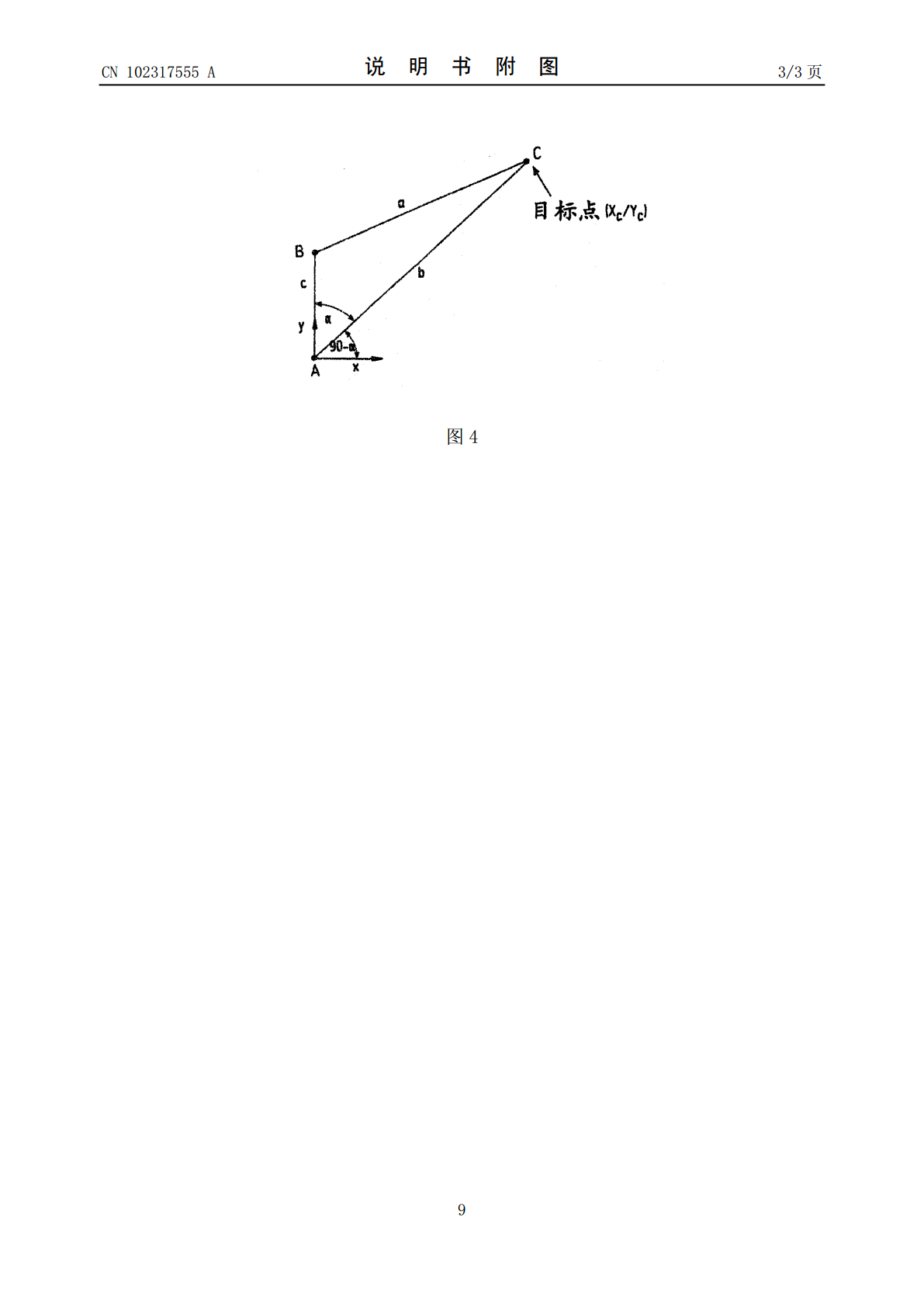
本发明涉及一种可行驶工作机械,具有一个底盘(10)和两个前支承悬伸臂和两个后支承悬伸臂(20、22)。支承悬伸臂从一个靠近底盘的行驶位置可偏转到一个支承位置,同时改变其在支承悬伸臂与底盘之间的基本角度(α),和/或支承悬伸臂可伸缩,同时改变其在支承侧端部与自由端部之间的长度。为了相对于底盘(10)能够自动确定支承脚位置(XC/YC),分别设置三个与支承悬伸臂相关的发射和接收单元(S1/E1、S2/E2、S3/E3),用于发射和接收运行时间信号或距离信号。另外,还设置一个对发射和接收单元的相互成对分配的发射

异形截面悬伸臂及悬伸检测机构.pdf
本发明公开一种异形截面悬伸臂,其包括呈长条形的悬伸本体,悬伸本体的宽度方向的横截面呈异形结构,且悬伸本体上沿其长度方向开设有多个驱动孔,驱动孔用于和驱动装置相啮合以使驱动装置可驱动悬伸本体伸缩。本发明的异形截面悬伸臂保证在宽度方向的刚度同时又减小了自身重量,从而使悬伸距离增长,有利于提高检测效率;同时在厚度方向的刚度稍低以使其可沿一定曲率半径弯曲,以利于悬伸臂尾部经手孔进入蒸汽发生器内部;而驱动装置通过驱动孔来驱动悬伸本体伸缩,驱动过程不易打滑,更安全可靠,定位精度高,且摩擦力小,可延长悬伸臂的使用寿命,
具有支承装置的可行驶作业机械.pdf
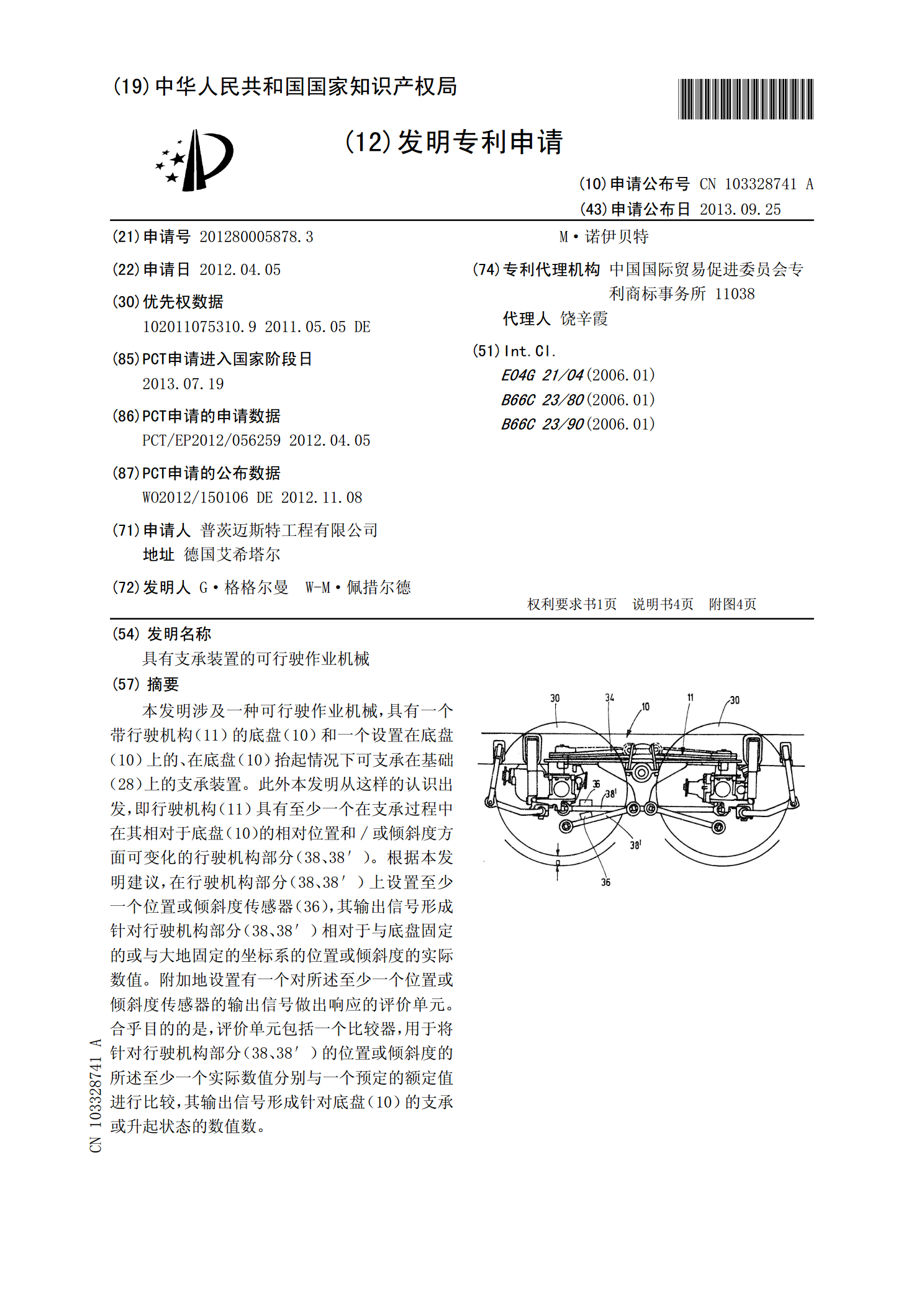
本发明涉及一种可行驶作业机械,具有一个带行驶机构(11)的底盘(10)和一个设置在底盘(10)上的、在底盘(10)抬起情况下可支承在基础(28)上的支承装置。此外本发明从这样的认识出发,即行驶机构(11)具有至少一个在支承过程中在其相对于底盘(10)的相对位置和/或倾斜度方面可变化的行驶机构部分(38、38′)。根据本发明建议,在行驶机构部分(38、38′)上设置至少一个位置或倾斜度传感器(36),其输出信号形成针对行驶机构部分(38、38′)相对于与底盘固定的或与大地固定的坐标系的位置或倾斜度的实际数值
可旋转的C臂支承装置以及C臂支承装置的旋转方法.pdf
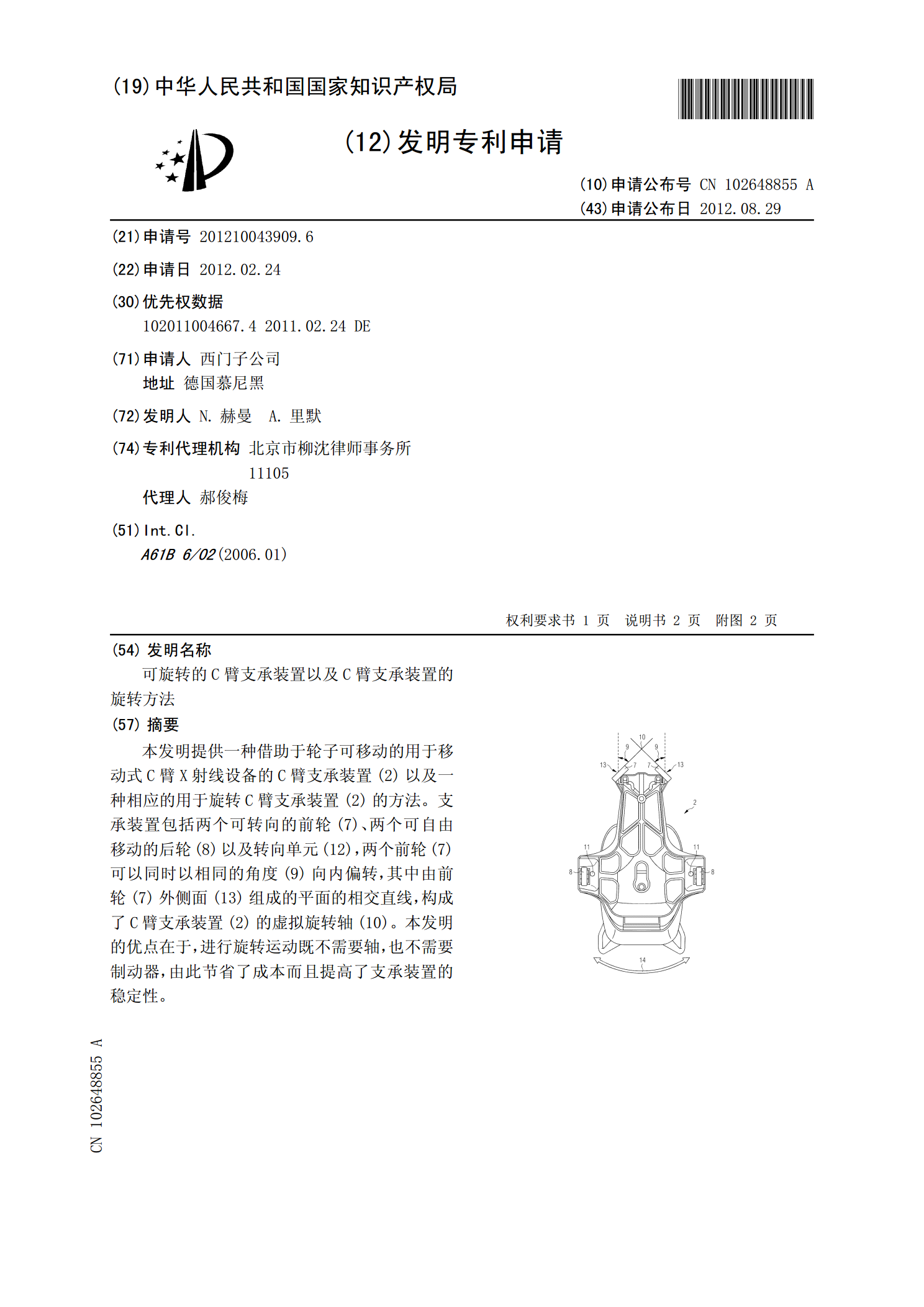
本发明提供一种借助于轮子可移动的用于移动式C臂X射线设备的C臂支承装置(2)以及一种相应的用于旋转C臂支承装置(2)的方法。支承装置包括两个可转向的前轮(7)、两个可自由移动的后轮(8)以及转向单元(12),两个前轮(7)可以同时以相同的角度(9)向内偏转,其中由前轮(7)外侧面(13)组成的平面的相交直线,构成了C臂支承装置(2)的虚拟旋转轴(10)。本发明的优点在于,进行旋转运动既不需要轴,也不需要制动器,由此节省了成本而且提高了支承装置的稳定性。
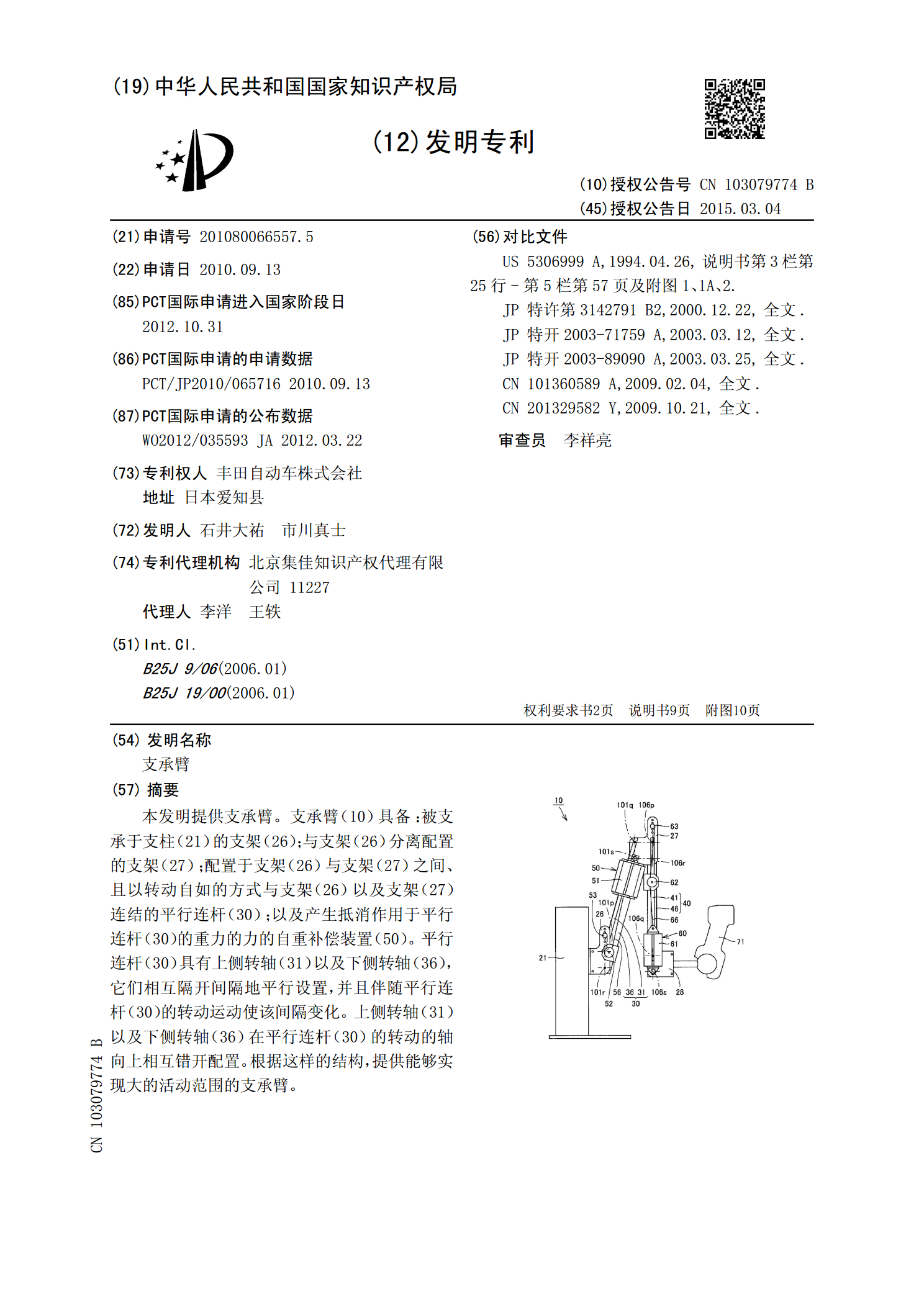
支承臂.pdf
本发明提供支承臂。支承臂(10)具备:被支承于支柱(21)的支架(26);与支架(26)分离配置的支架(27);配置于支架(26)与支架(27)之间、且以转动自如的方式与支架(26)以及支架(27)连结的平行连杆(30);以及产生抵消作用于平行连杆(30)的重力的力的自重补偿装置(50)。平行连杆(30)具有上侧转轴(31)以及下侧转轴(36),它们相互隔开间隔地平行设置,并且伴随平行连杆(30)的转动运动使该间隔变化。上侧转轴(31)以及下侧转轴(36)在平行连杆(30)的转动的轴向上相互错开配置。根据