
一种有膝关节并联腿结构四足仿生机器人.pdf

努力****绮亦

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种有膝关节并联腿结构四足仿生机器人.pdf
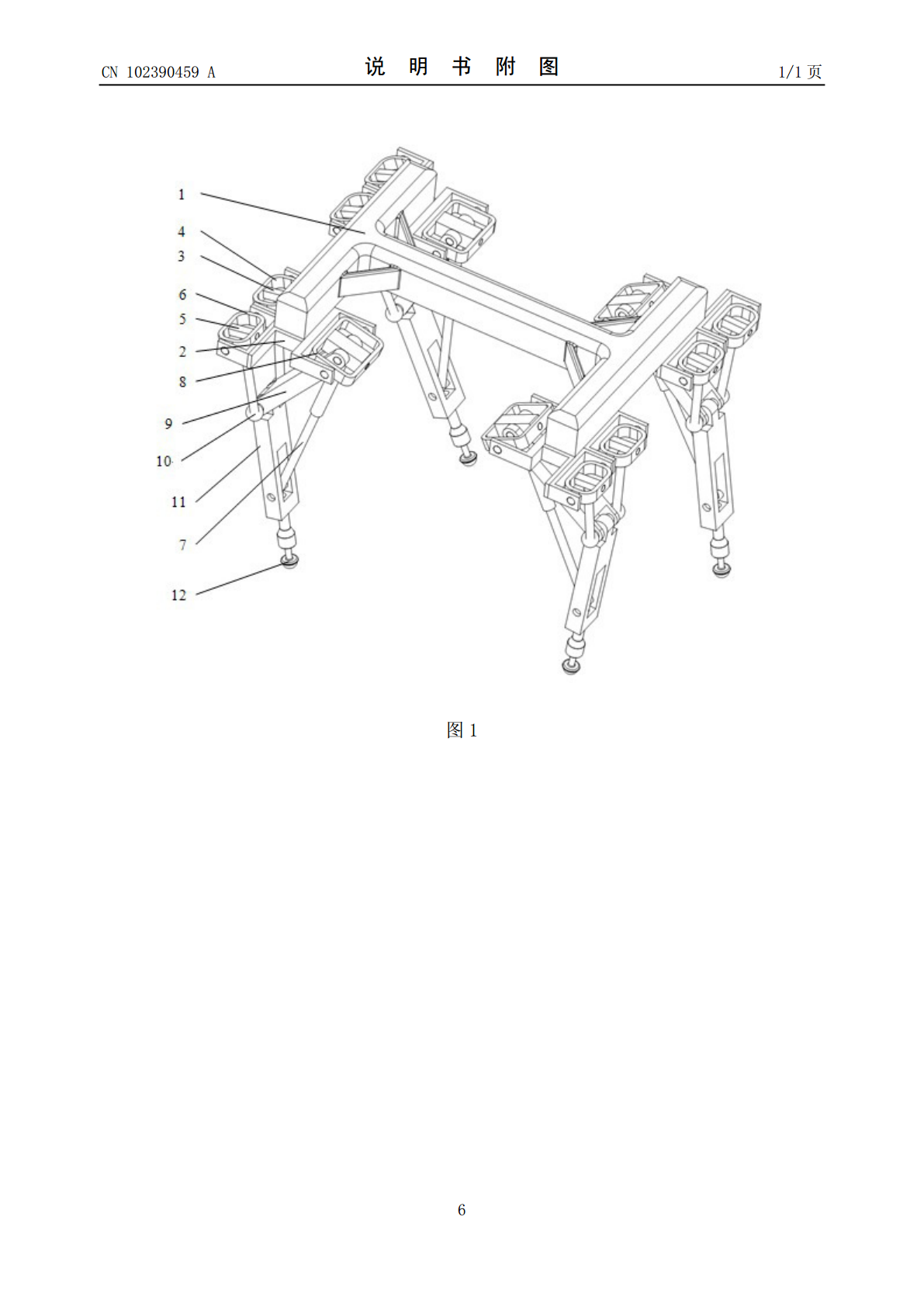
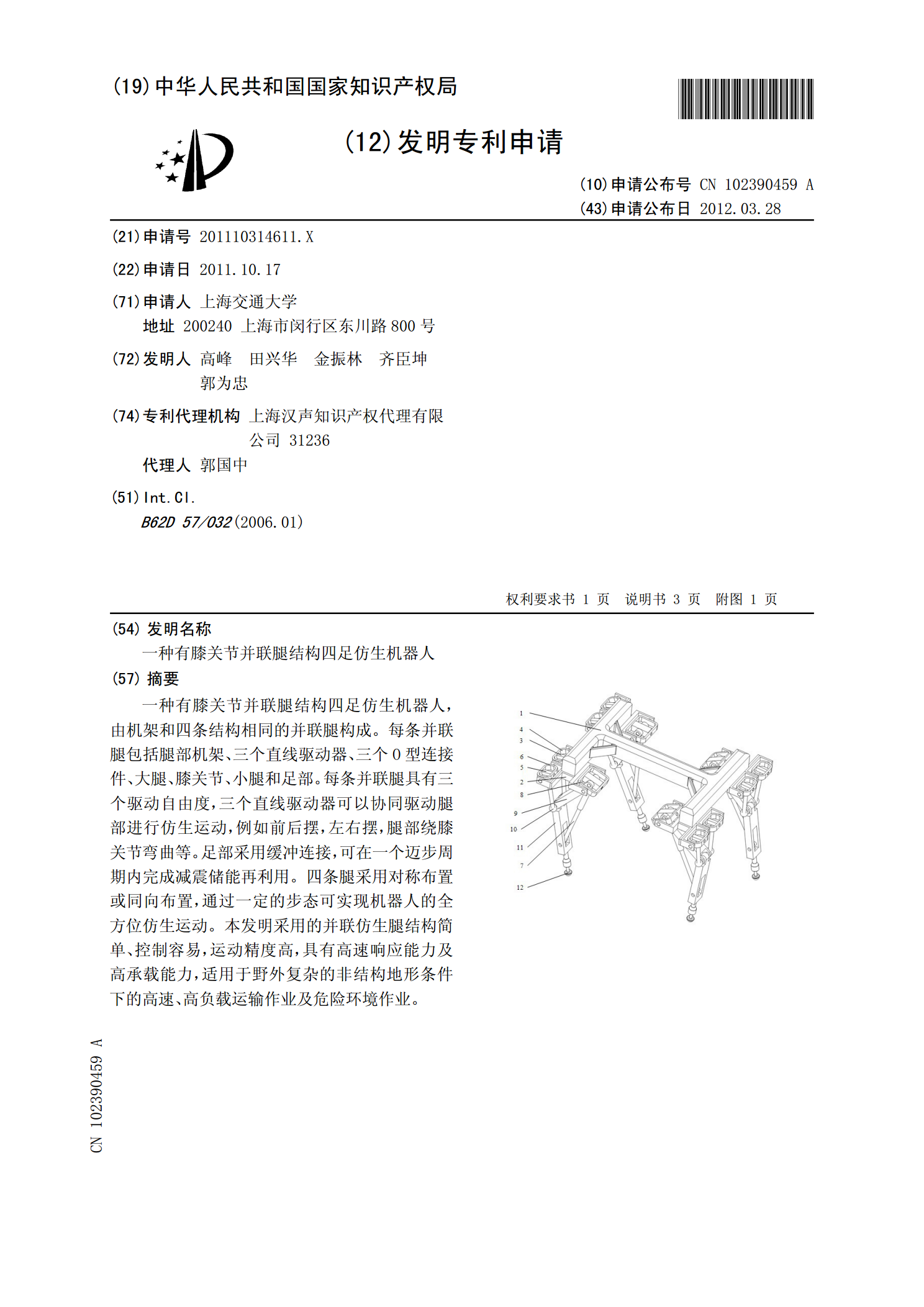
一种有膝关节并联腿结构四足仿生机器人,由机架和四条结构相同的并联腿构成。每条并联腿包括腿部机架、三个直线驱动器、三个O型连接件、大腿、膝关节、小腿和足部。每条并联腿具有三个驱动自由度,三个直线驱动器可以协同驱动腿部进行仿生运动,例如前后摆,左右摆,腿部绕膝关节弯曲等。足部采用缓冲连接,可在一个迈步周期内完成减震储能再利用。四条腿采用对称布置或同向布置,通过一定的步态可实现机器人的全方位仿生运动。本发明采用的并联仿生腿结构简单、控制容易,运动精度高,具有高速响应能力及高承载能力,适用于野外复杂的非结构地形条
轮腿复合结构及轮腿复合四足仿生机器人.pdf
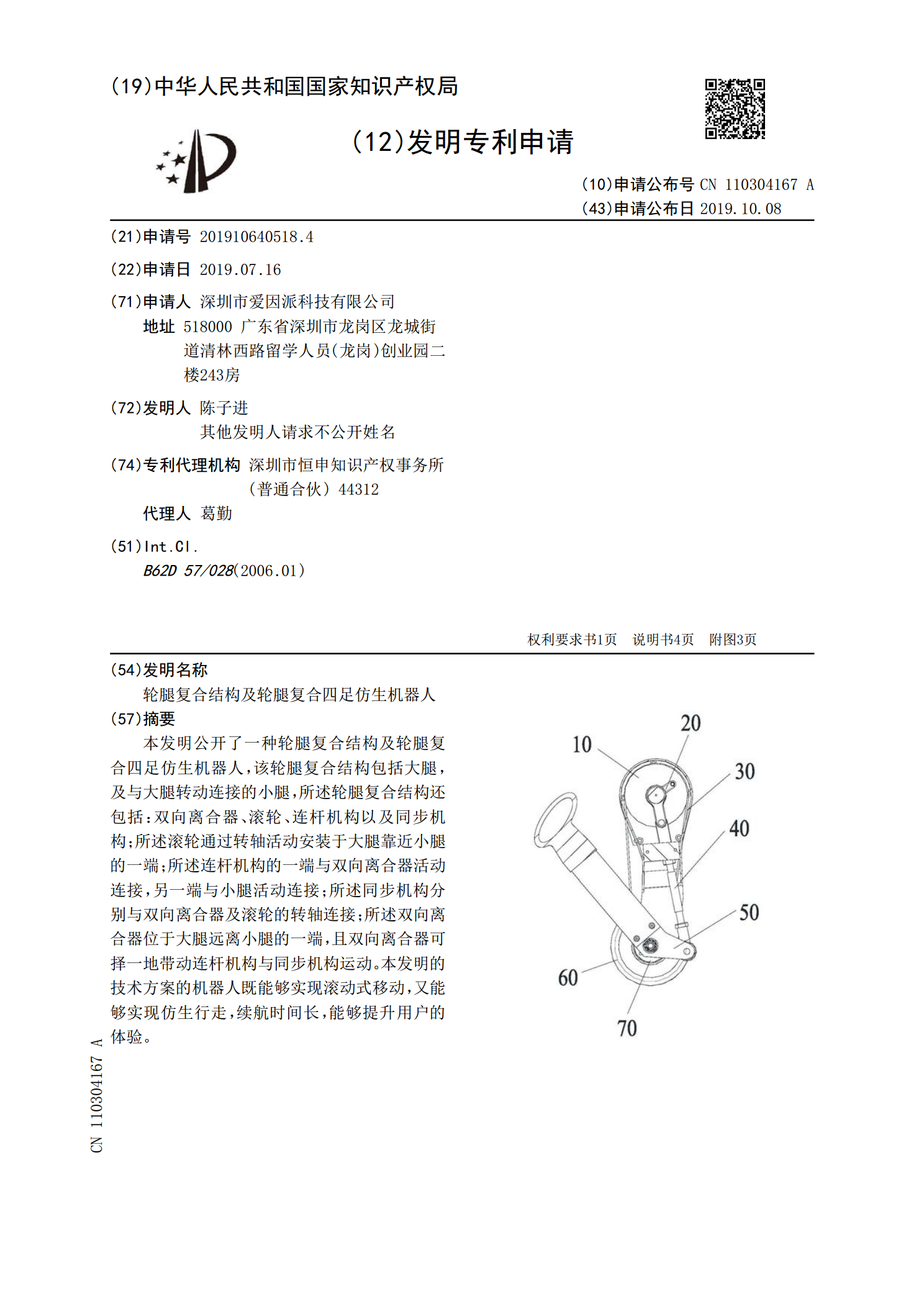
本发明公开了一种轮腿复合结构及轮腿复合四足仿生机器人,该轮腿复合结构包括大腿,及与大腿转动连接的小腿,所述轮腿复合结构还包括:双向离合器、滚轮、连杆机构以及同步机构;所述滚轮通过转轴活动安装于大腿靠近小腿的一端;所述连杆机构的一端与双向离合器活动连接,另一端与小腿活动连接;所述同步机构分别与双向离合器及滚轮的转轴连接;所述双向离合器位于大腿远离小腿的一端,且双向离合器可择一地带动连杆机构与同步机构运动。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。
新型轮腿复合结构及四足仿生机器人.pdf
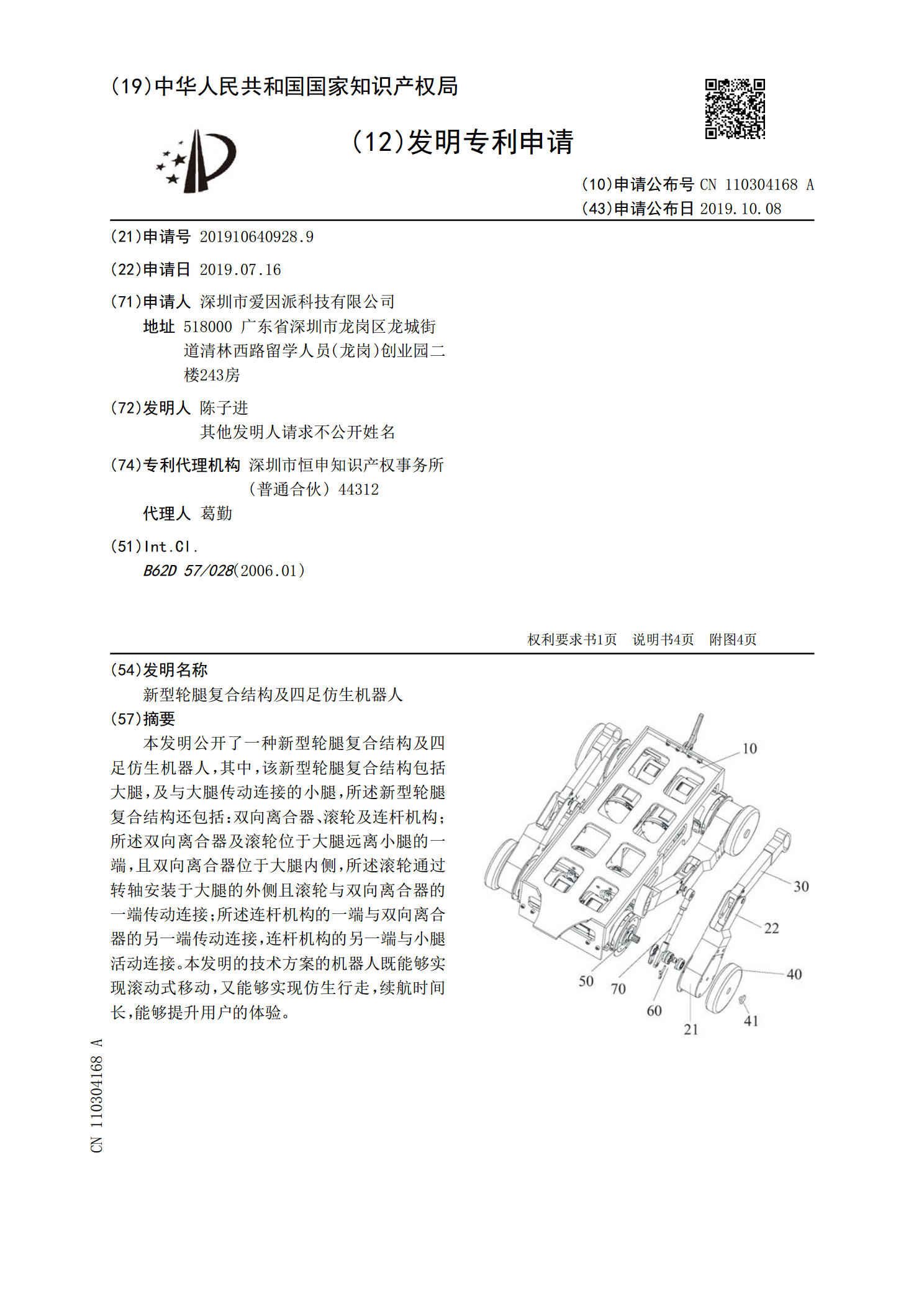
本发明公开了一种新型轮腿复合结构及四足仿生机器人,其中,该新型轮腿复合结构包括大腿,及与大腿传动连接的小腿,所述新型轮腿复合结构还包括:双向离合器、滚轮及连杆机构;所述双向离合器及滚轮位于大腿远离小腿的一端,且双向离合器位于大腿内侧,所述滚轮通过转轴安装于大腿的外侧且滚轮与双向离合器的一端传动连接;所述连杆机构的一端与双向离合器的另一端传动连接,连杆机构的另一端与小腿活动连接。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。
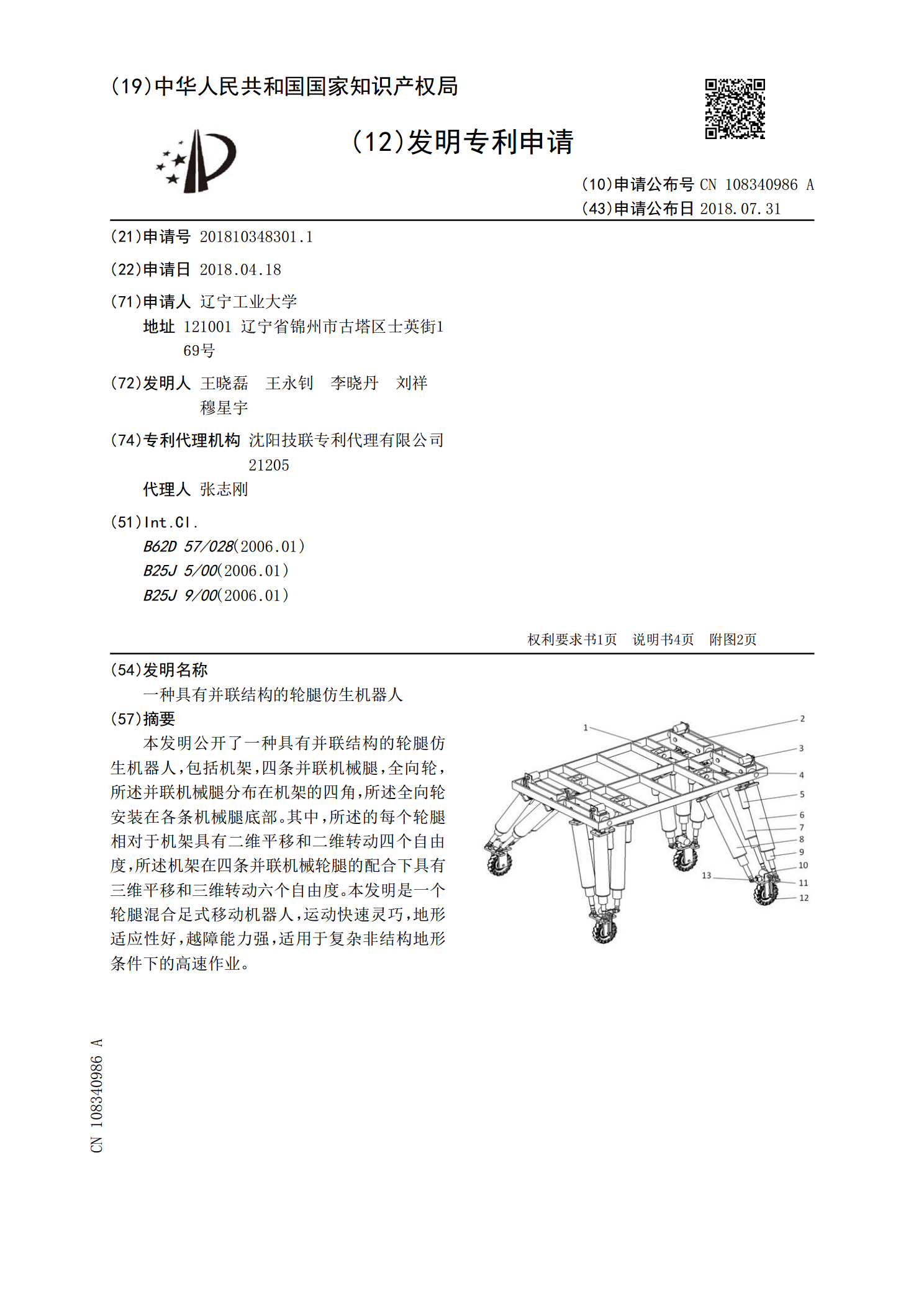
一种具有并联结构的轮腿仿生机器人.pdf
本发明公开了一种具有并联结构的轮腿仿生机器人,包括机架,四条并联机械腿,全向轮,所述并联机械腿分布在机架的四角,所述全向轮安装在各条机械腿底部。其中,所述的每个轮腿相对于机架具有二维平移和二维转动四个自由度,所述机架在四条并联机械轮腿的配合下具有三维平移和三维转动六个自由度。本发明是一个轮腿混合足式移动机器人,运动快速灵巧,地形适应性好,越障能力强,适用于复杂非结构地形条件下的高速作业。
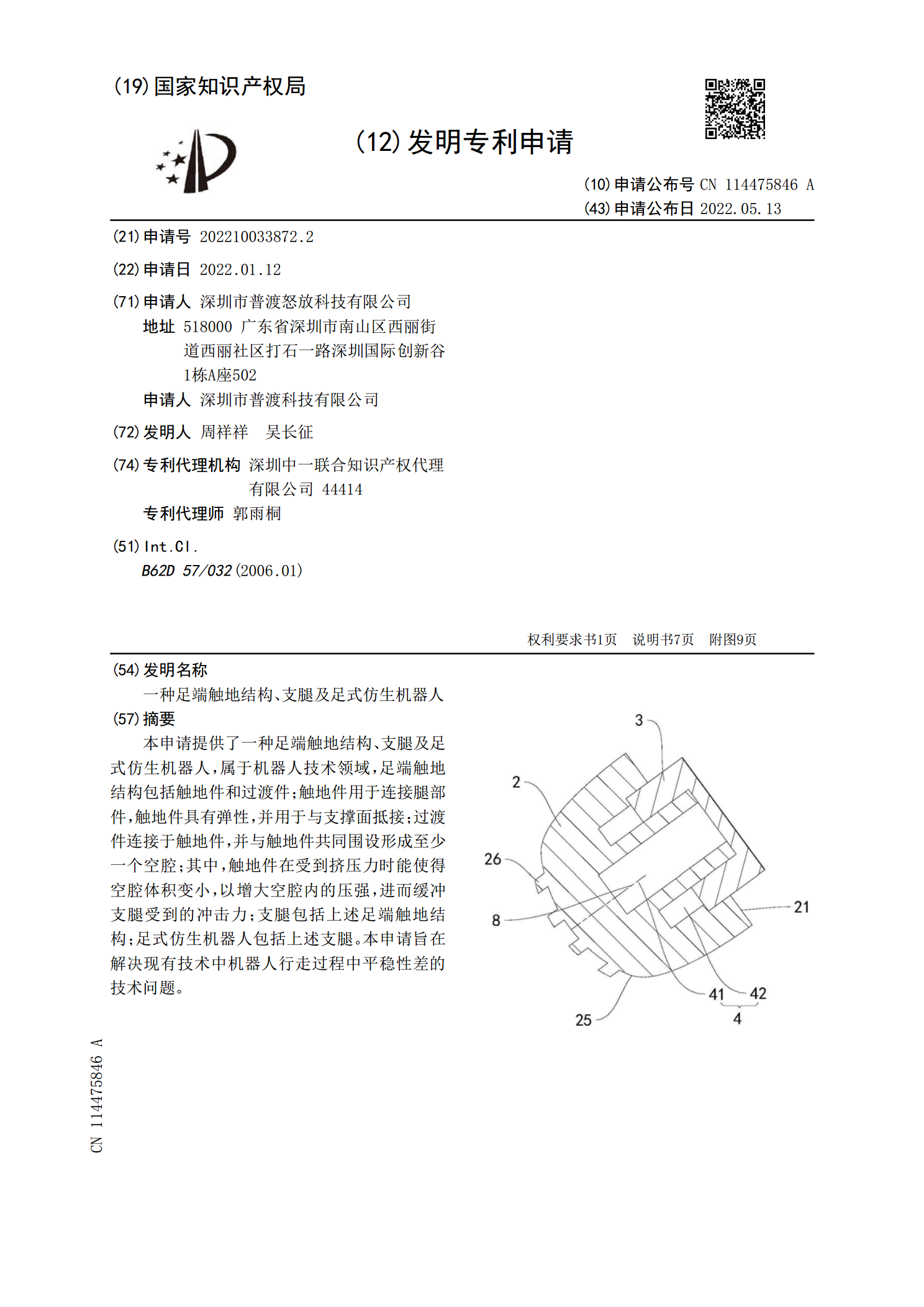
一种足端触地结构、支腿及足式仿生机器人.pdf
本申请提供了一种足端触地结构、支腿及足式仿生机器人,属于机器人技术领域,足端触地结构包括触地件和过渡件;触地件用于连接腿部件,触地件具有弹性,并用于与支撑面抵接;过渡件连接于触地件,并与触地件共同围设形成至少一个空腔;其中,触地件在受到挤压力时能使得空腔体积变小,以增大空腔内的压强,进而缓冲支腿受到的冲击力;支腿包括上述足端触地结构;足式仿生机器人包括上述支腿。本申请旨在解决现有技术中机器人行走过程中平稳性差的技术问题。