
一种足端触地结构、支腿及足式仿生机器人.pdf

飞飙****ng

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种足端触地结构、支腿及足式仿生机器人.pdf
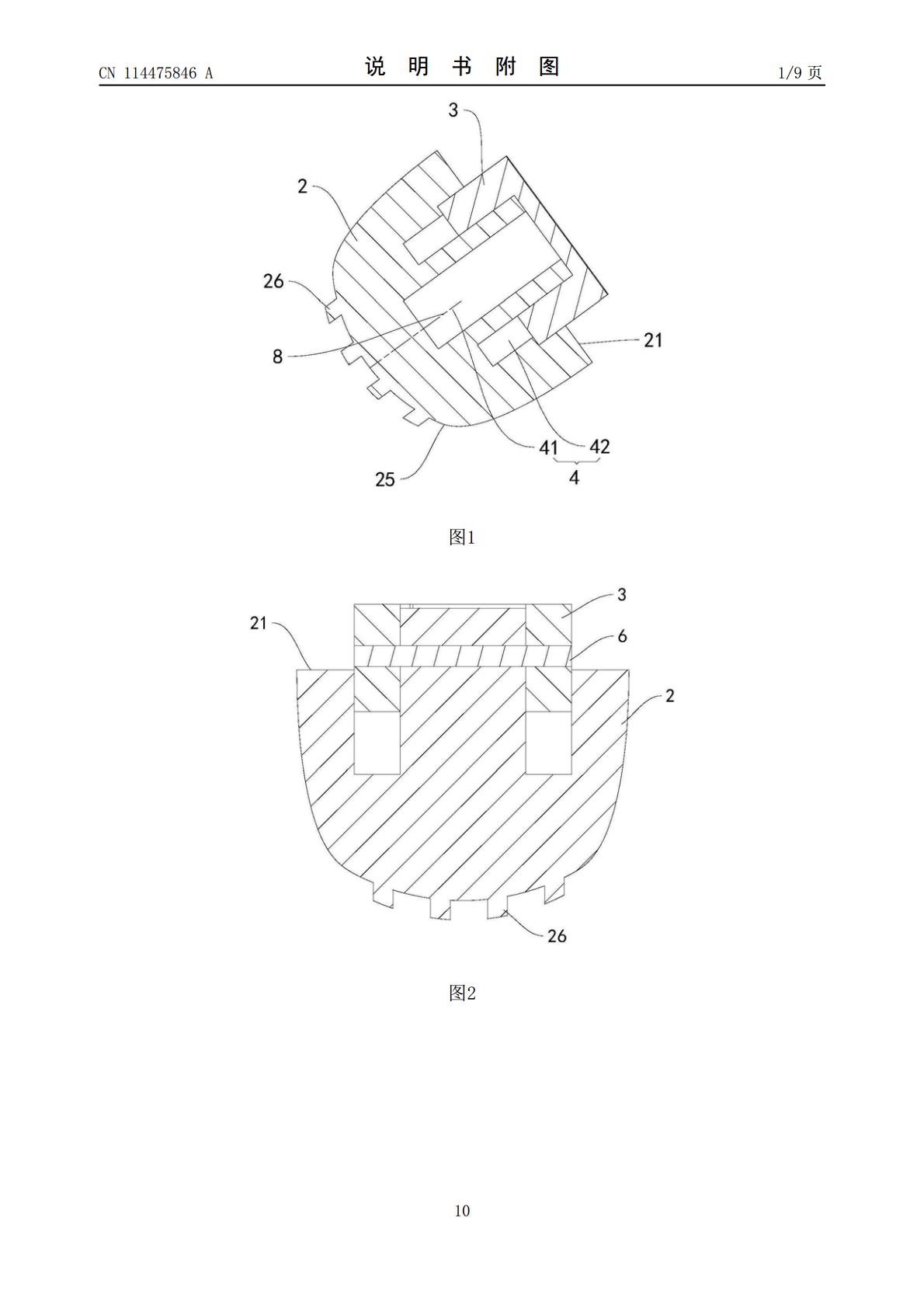
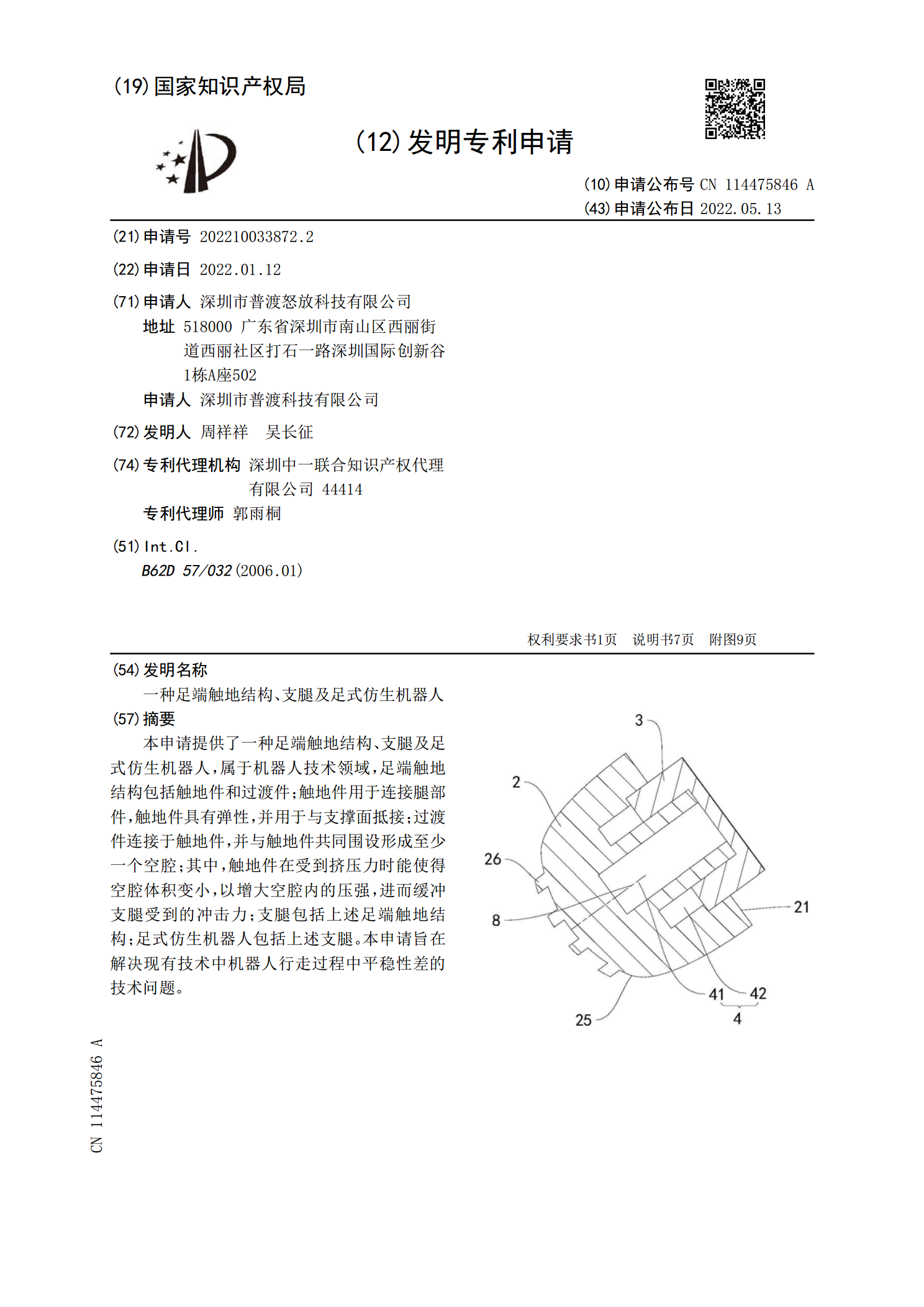
本申请提供了一种足端触地结构、支腿及足式仿生机器人,属于机器人技术领域,足端触地结构包括触地件和过渡件;触地件用于连接腿部件,触地件具有弹性,并用于与支撑面抵接;过渡件连接于触地件,并与触地件共同围设形成至少一个空腔;其中,触地件在受到挤压力时能使得空腔体积变小,以增大空腔内的压强,进而缓冲支腿受到的冲击力;支腿包括上述足端触地结构;足式仿生机器人包括上述支腿。本申请旨在解决现有技术中机器人行走过程中平稳性差的技术问题。
一种提高腿足式机器人触地稳定性的耦合仿生足垫.pdf
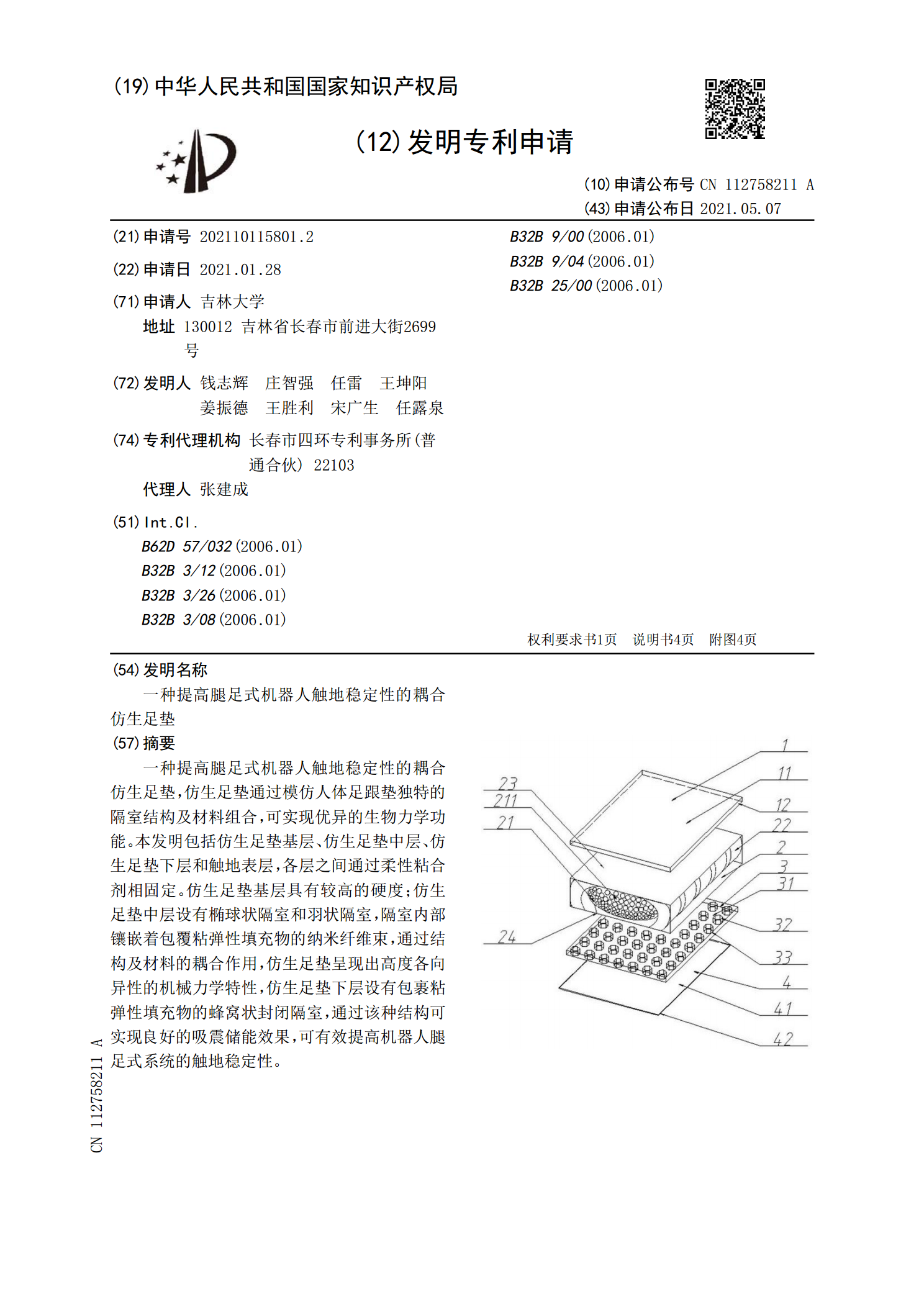
一种提高腿足式机器人触地稳定性的耦合仿生足垫,仿生足垫通过模仿人体足跟垫独特的隔室结构及材料组合,可实现优异的生物力学功能。本发明包括仿生足垫基层、仿生足垫中层、仿生足垫下层和触地表层,各层之间通过柔性粘合剂相固定。仿生足垫基层具有较高的硬度;仿生足垫中层设有椭球状隔室和羽状隔室,隔室内部镶嵌着包覆粘弹性填充物的纳米纤维束,通过结构及材料的耦合作用,仿生足垫呈现出高度各向异性的机械力学特性,仿生足垫下层设有包裹粘弹性填充物的蜂窝状封闭隔室,通过该种结构可实现良好的吸震储能效果,可有效提高机器人腿足式系统的
一种足式机器人触地感应机构及足式机器人.pdf
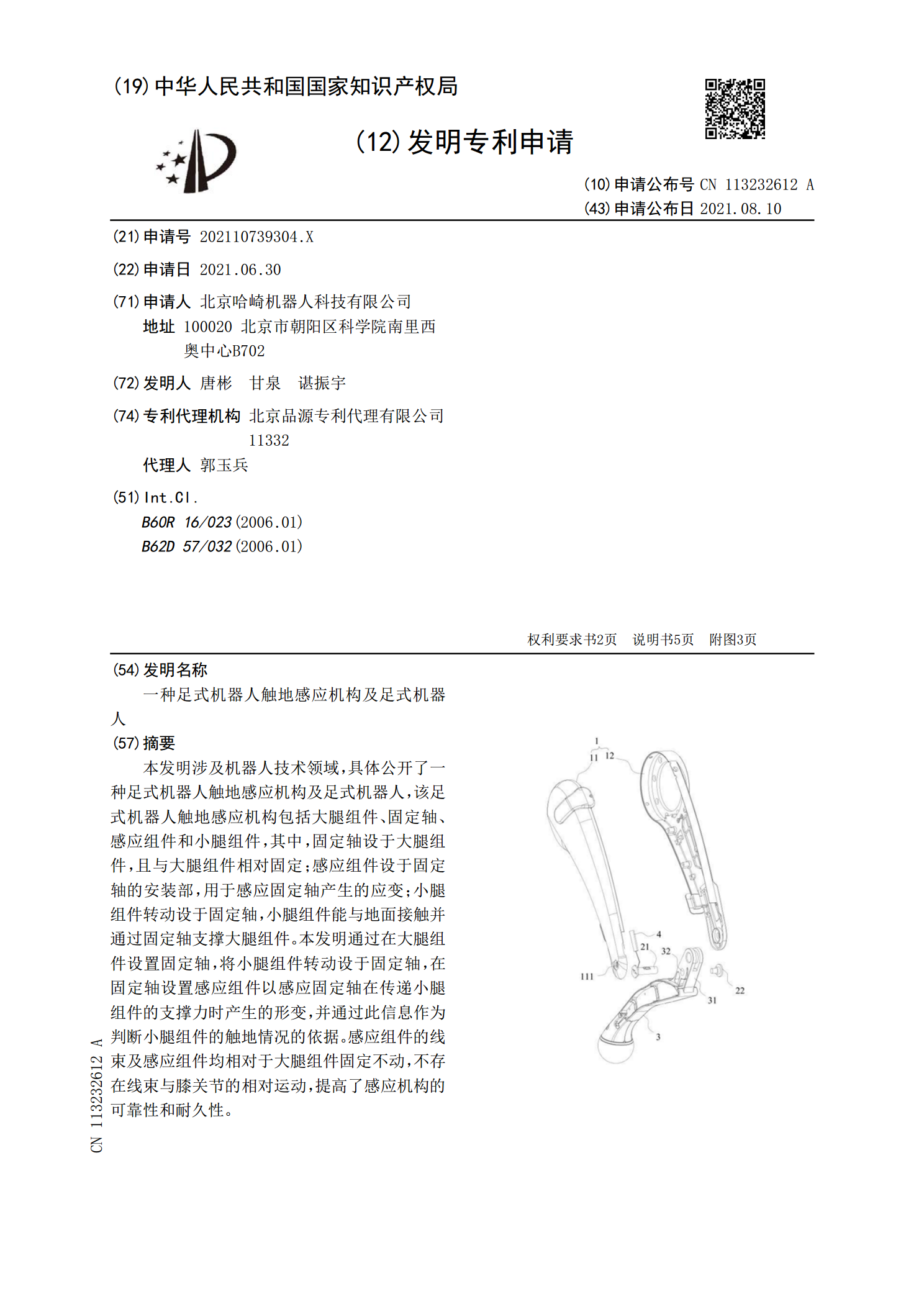
本发明涉及机器人技术领域,具体公开了一种足式机器人触地感应机构及足式机器人,该足式机器人触地感应机构包括大腿组件、固定轴、感应组件和小腿组件,其中,固定轴设于大腿组件,且与大腿组件相对固定;感应组件设于固定轴的安装部,用于感应固定轴产生的应变;小腿组件转动设于固定轴,小腿组件能与地面接触并通过固定轴支撑大腿组件。本发明通过在大腿组件设置固定轴,将小腿组件转动设于固定轴,在固定轴设置感应组件以感应固定轴在传递小腿组件的支撑力时产生的形变,并通过此信息作为判断小腿组件的触地情况的依据。感应组件的线束及感应组件

机械腿结构及足式机器人.pdf
本发明提供了一种机械腿结构及足式机器人,涉及机器人技术领域,本发明提供的机械腿结构包括依次连接的固定座、髋部、大腿部和小腿部,固定座上设有髋部电机、大腿部电机和小腿部电机,髋部电机与髋部之间设有第一齿轮传动机构,以驱动髋部相对于固定座转动,大腿部电机与大腿部之间设有第二齿轮传动机构,以驱动大腿部相对于髋部转动,小腿部电机与小腿部之间设有第三齿轮传动机构,以驱动小腿部相对于大腿部转动。本发明提供的机械腿结构有效的减小了大腿部及小腿部的重量,且髋部、大腿部、小腿部运动均由齿轮传动机构驱动,均可实现大幅度的转动

足端装置及足式机器人.pdf
本发明公开了一种足端装置及足式机器人,足端装置包括支撑杆、固定件和预紧组件;固定件沿第一方向设有活动孔,支撑杆的第一端位于活动孔内并能够在活动孔内活动,固定件与支撑杆之间设有防止支撑杆从活动孔脱离的限位结构,固定件的表面设有沿第二方向设置的安装通孔,第二方向与第一方向不平行,安装通孔设有至少两个并沿固定件的周向呈间隔设置;预紧组件设有至少两个并与安装通孔一一对应,预紧组件包括弹性件,弹性件的第一端通过安装通孔伸入固定件内并抵压支撑杆,弹性件的第二端与固定件固定。支撑杆能够相对固定件进行一定幅度的摆动和伸缩