
轮腿复合结构及轮腿复合四足仿生机器人.pdf

傲丝****账号

1/9
2/9
3/9

4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮腿复合结构及轮腿复合四足仿生机器人.pdf
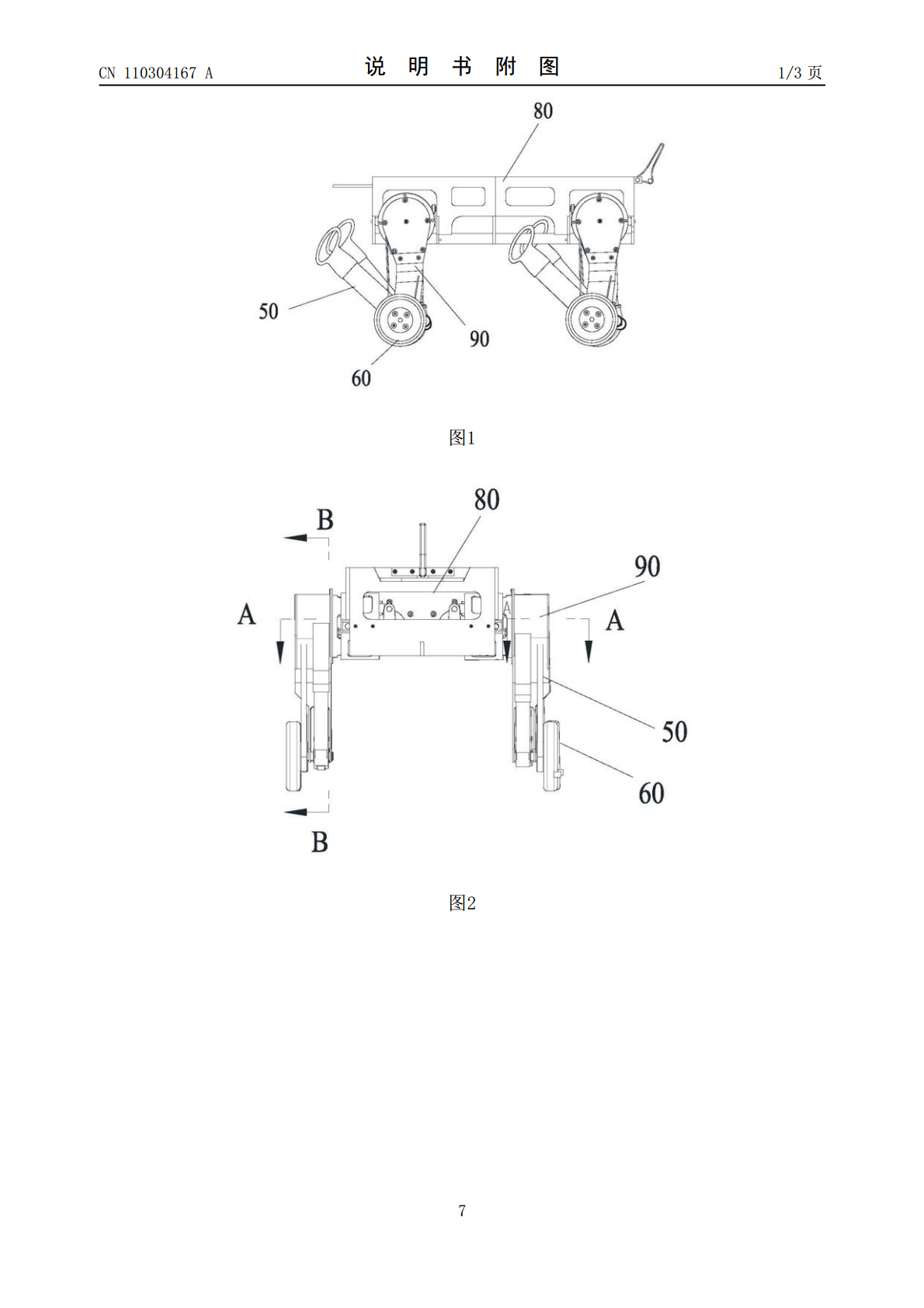
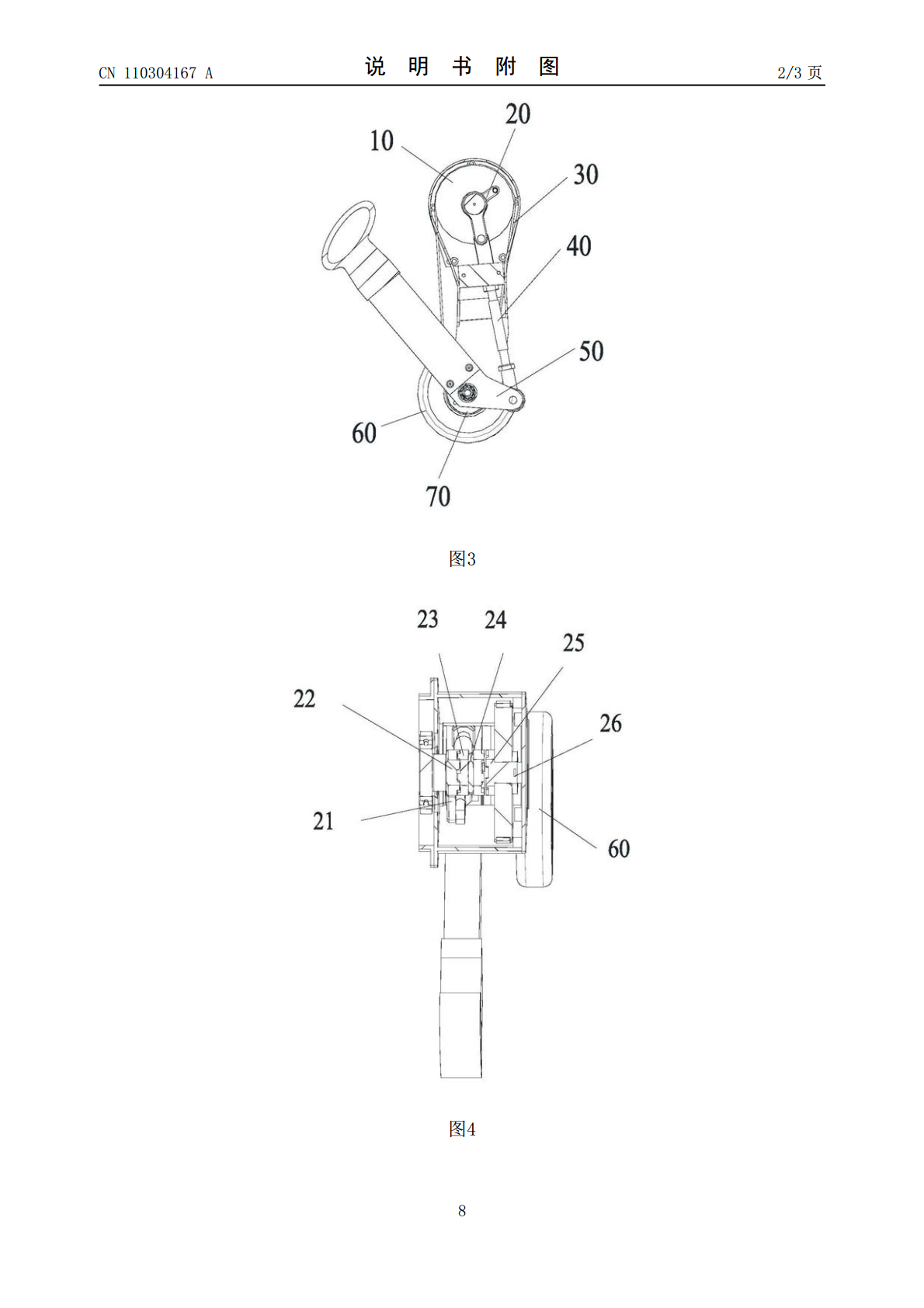
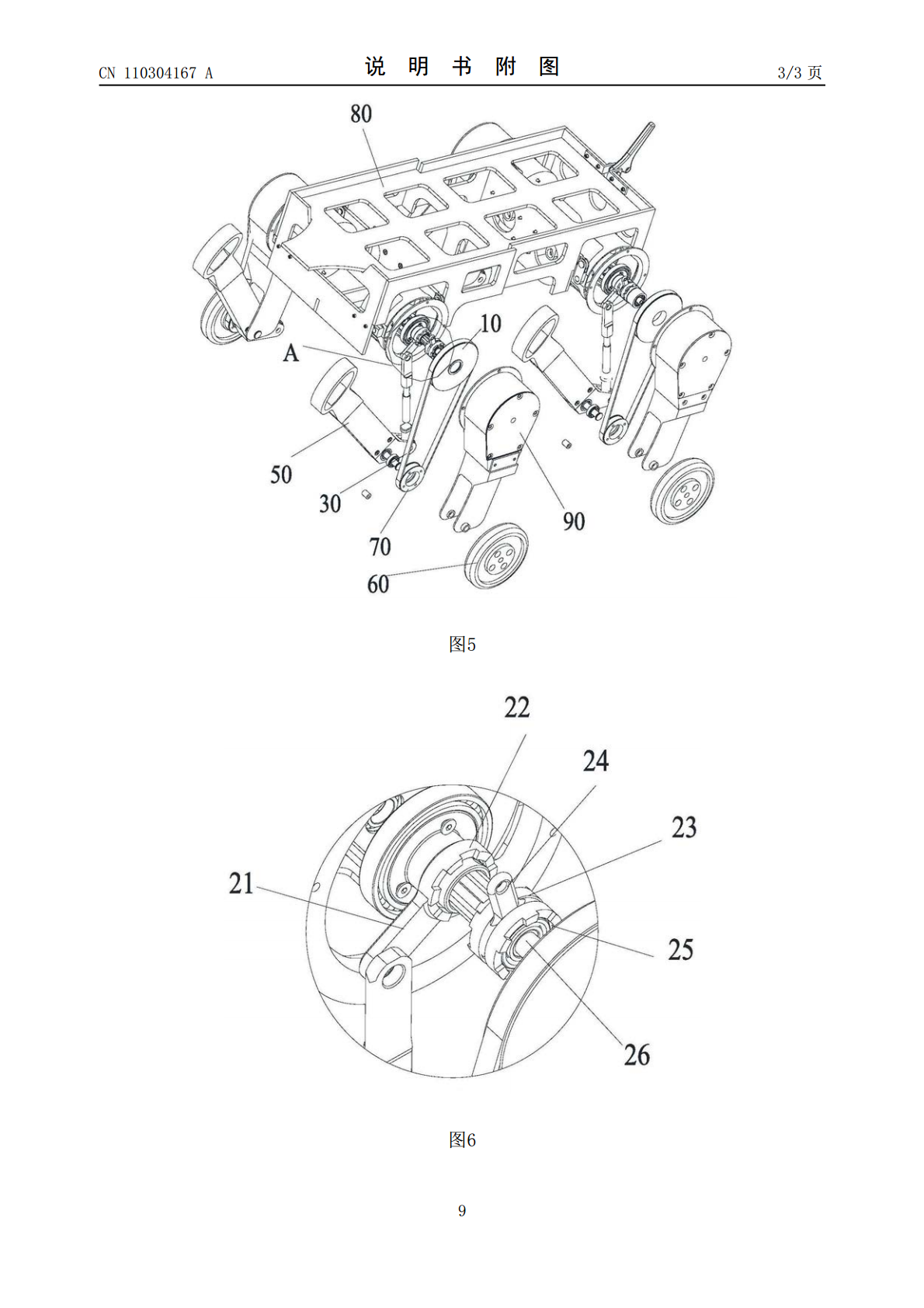
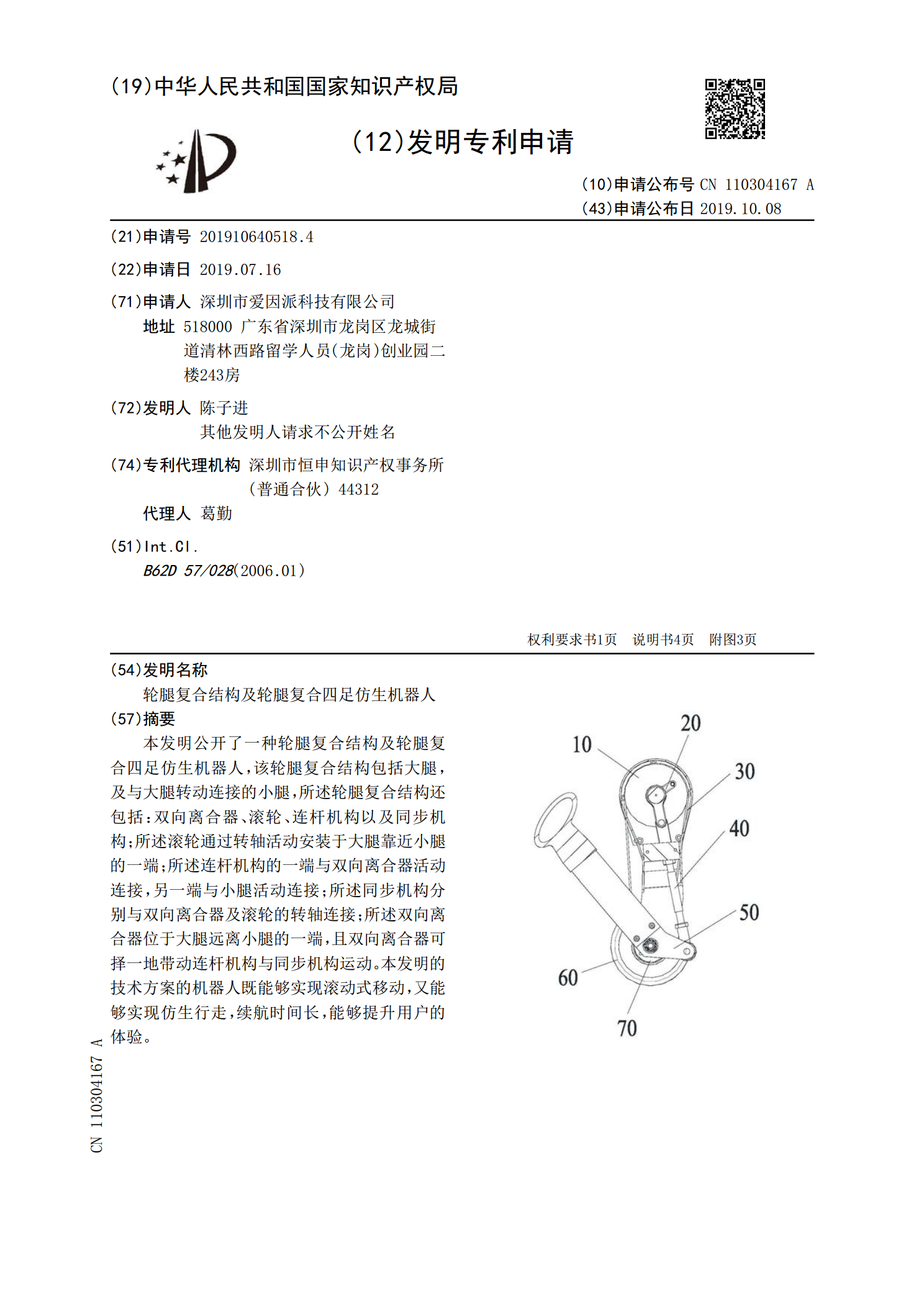
本发明公开了一种轮腿复合结构及轮腿复合四足仿生机器人,该轮腿复合结构包括大腿,及与大腿转动连接的小腿,所述轮腿复合结构还包括:双向离合器、滚轮、连杆机构以及同步机构;所述滚轮通过转轴活动安装于大腿靠近小腿的一端;所述连杆机构的一端与双向离合器活动连接,另一端与小腿活动连接;所述同步机构分别与双向离合器及滚轮的转轴连接;所述双向离合器位于大腿远离小腿的一端,且双向离合器可择一地带动连杆机构与同步机构运动。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。
新型轮腿复合结构及四足仿生机器人.pdf
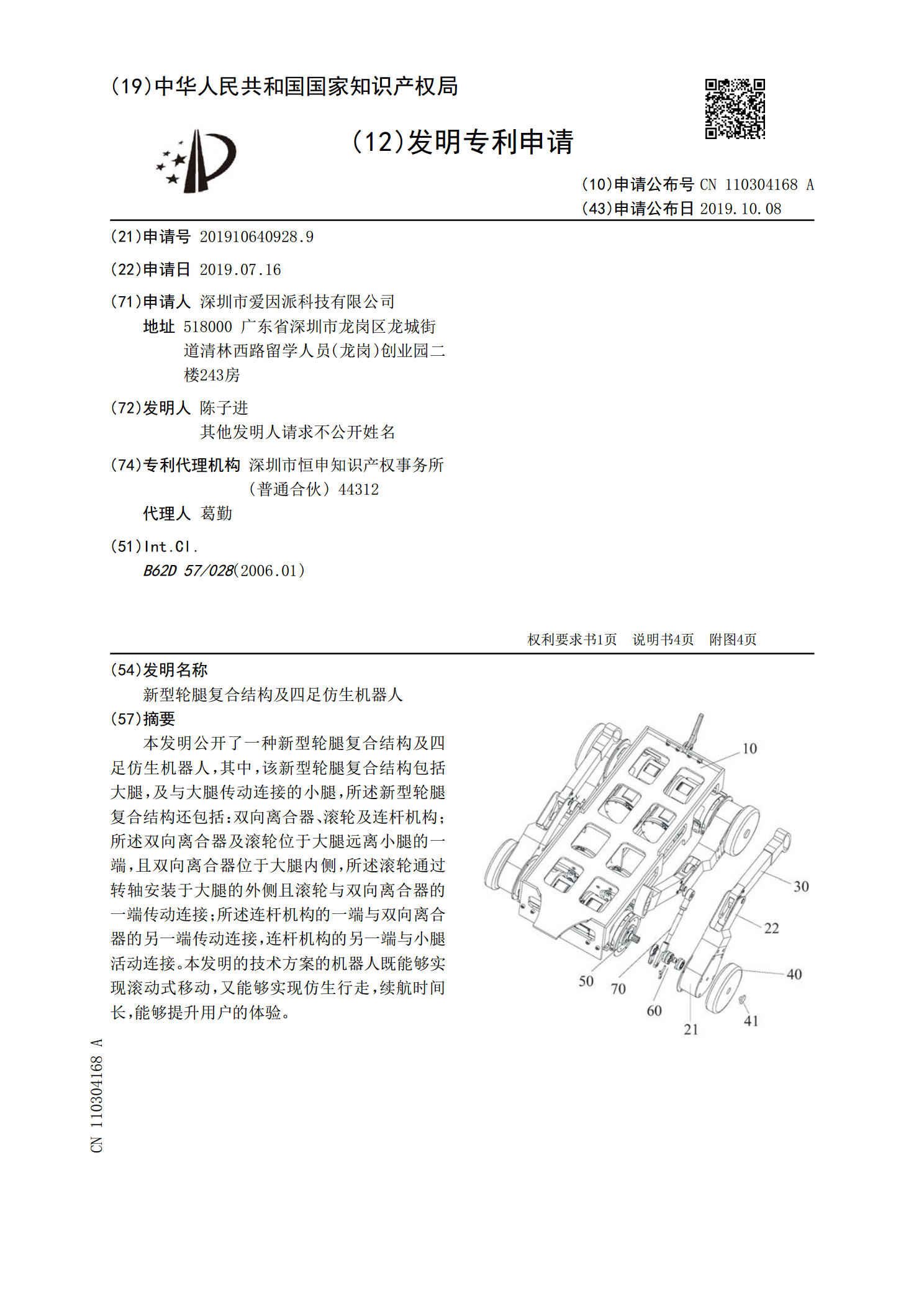
本发明公开了一种新型轮腿复合结构及四足仿生机器人,其中,该新型轮腿复合结构包括大腿,及与大腿传动连接的小腿,所述新型轮腿复合结构还包括:双向离合器、滚轮及连杆机构;所述双向离合器及滚轮位于大腿远离小腿的一端,且双向离合器位于大腿内侧,所述滚轮通过转轴安装于大腿的外侧且滚轮与双向离合器的一端传动连接;所述连杆机构的一端与双向离合器的另一端传动连接,连杆机构的另一端与小腿活动连接。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。

轮腿复合式机器人.pdf
本发明公开一种轮腿复合式机器人结构,当路况较好时,这种机器人能够利用车轮驱动机器人快速前进,当路面情况较为复杂时,则可以通过行走腿进行前进,方便灵活;并且它的能量来自于太阳能帆板,降低能源消耗,延长有效工作时间。因此可以说这种机器人具备了多种优点,特别适合于在本领域中推广应用,其市场前景十分广阔。
轮-腿复合并联腿机构及水下机器人.pdf
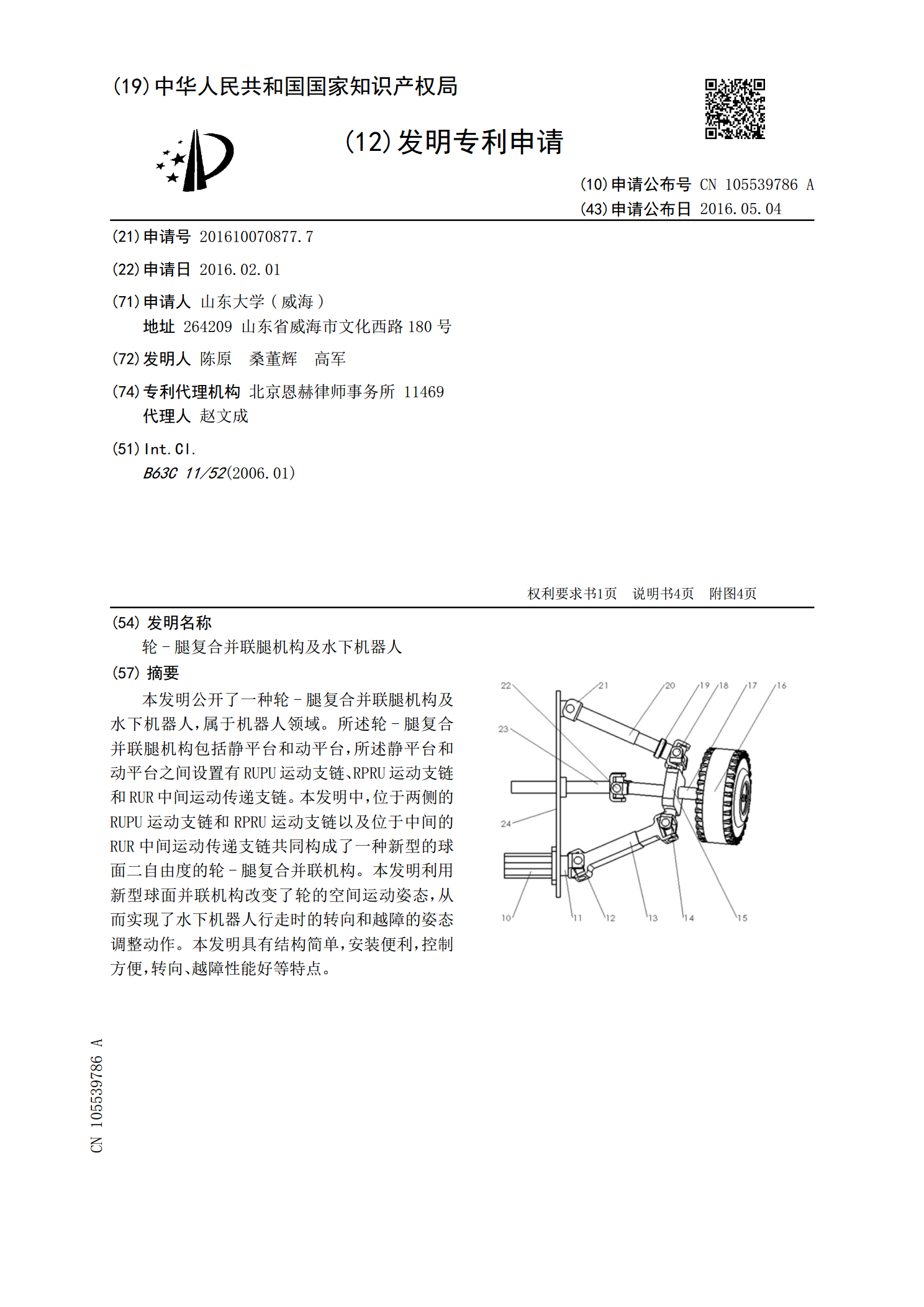
本发明公开了一种轮-腿复合并联腿机构及水下机器人,属于机器人领域。所述轮-腿复合并联腿机构包括静平台和动平台,所述静平台和动平台之间设置有RUPU运动支链、RPRU运动支链和RUR中间运动传递支链。本发明中,位于两侧的RUPU运动支链和RPRU运动支链以及位于中间的RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
一种轮腿复合型的机器人移动装置及轮腿复合型机器人.pdf
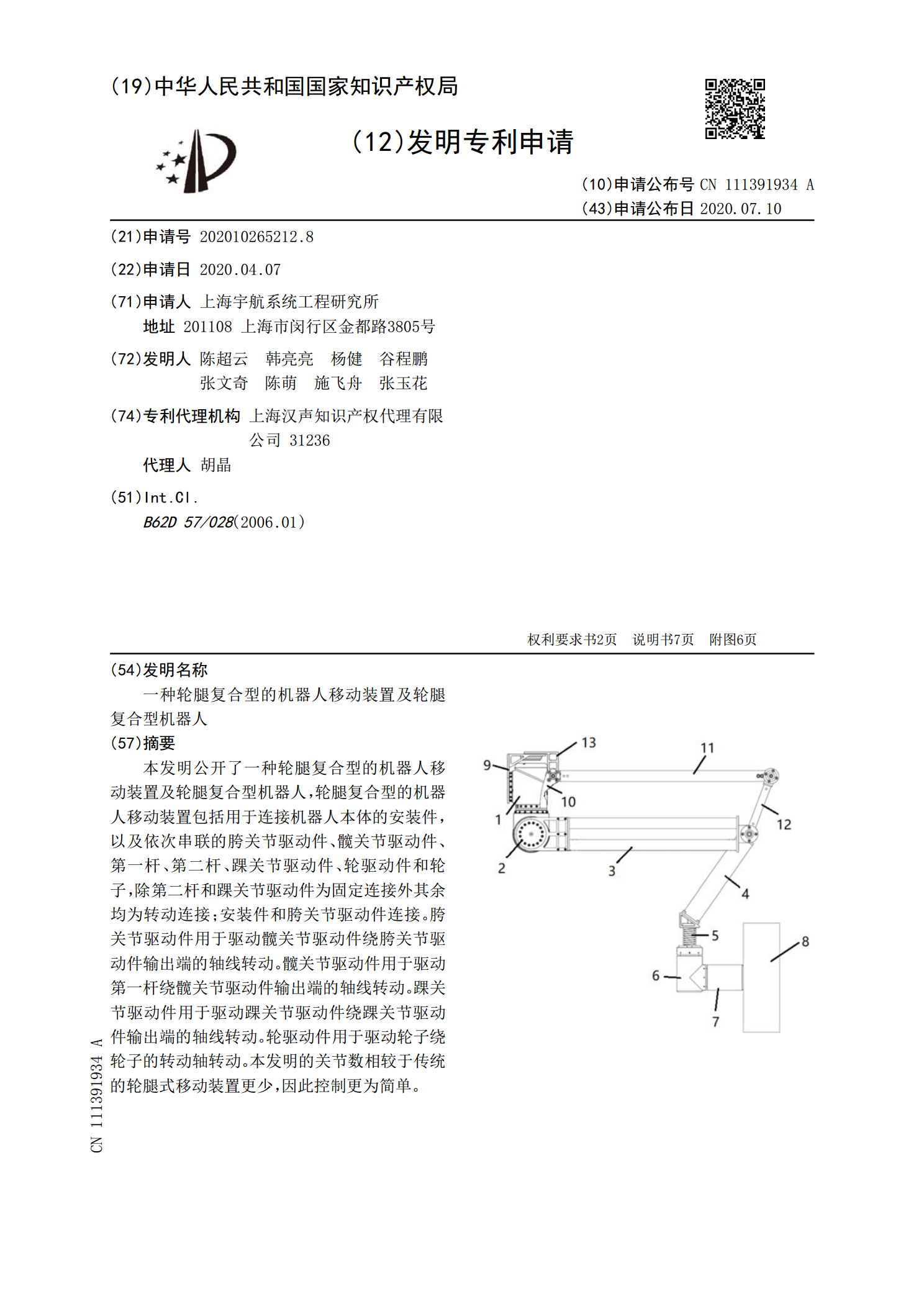
本发明公开了一种轮腿复合型的机器人移动装置及轮腿复合型机器人,轮腿复合型的机器人移动装置包括用于连接机器人本体的安装件,以及依次串联的胯关节驱动件、髋关节驱动件、第一杆、第二杆、踝关节驱动件、轮驱动件和轮子,除第二杆和踝关节驱动件为固定连接外其余均为转动连接;安装件和胯关节驱动件连接。胯关节驱动件用于驱动髋关节驱动件绕胯关节驱动件输出端的轴线转动。髋关节驱动件用于驱动第一杆绕髋关节驱动件输出端的轴线转动。踝关节驱动件用于驱动踝关节驱动件绕踝关节驱动件输出端的轴线转动。轮驱动件用于驱动轮子绕轮子的转动轴转动