
新型轮腿复合结构及四足仿生机器人.pdf

羽沫****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
新型轮腿复合结构及四足仿生机器人.pdf
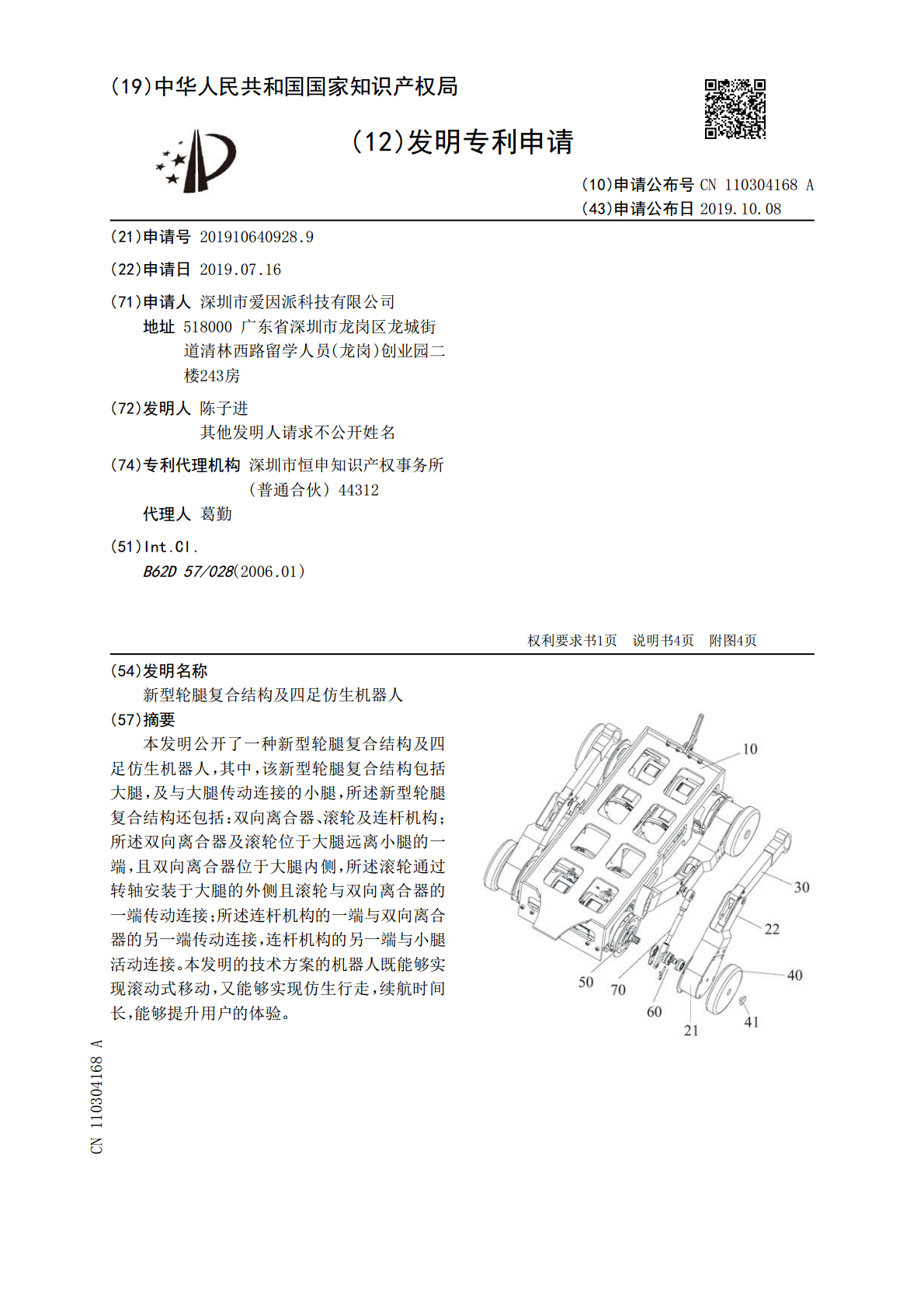
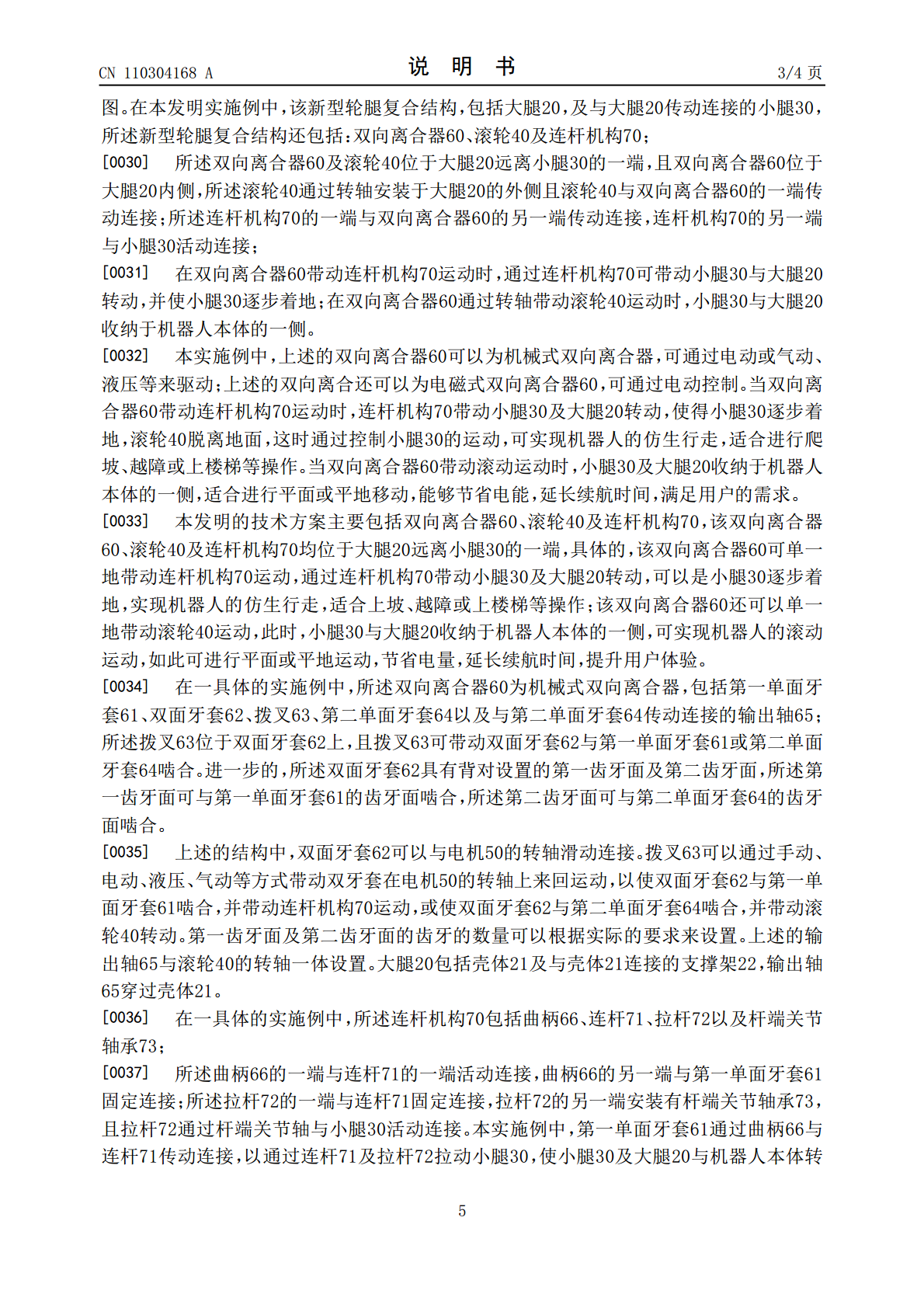
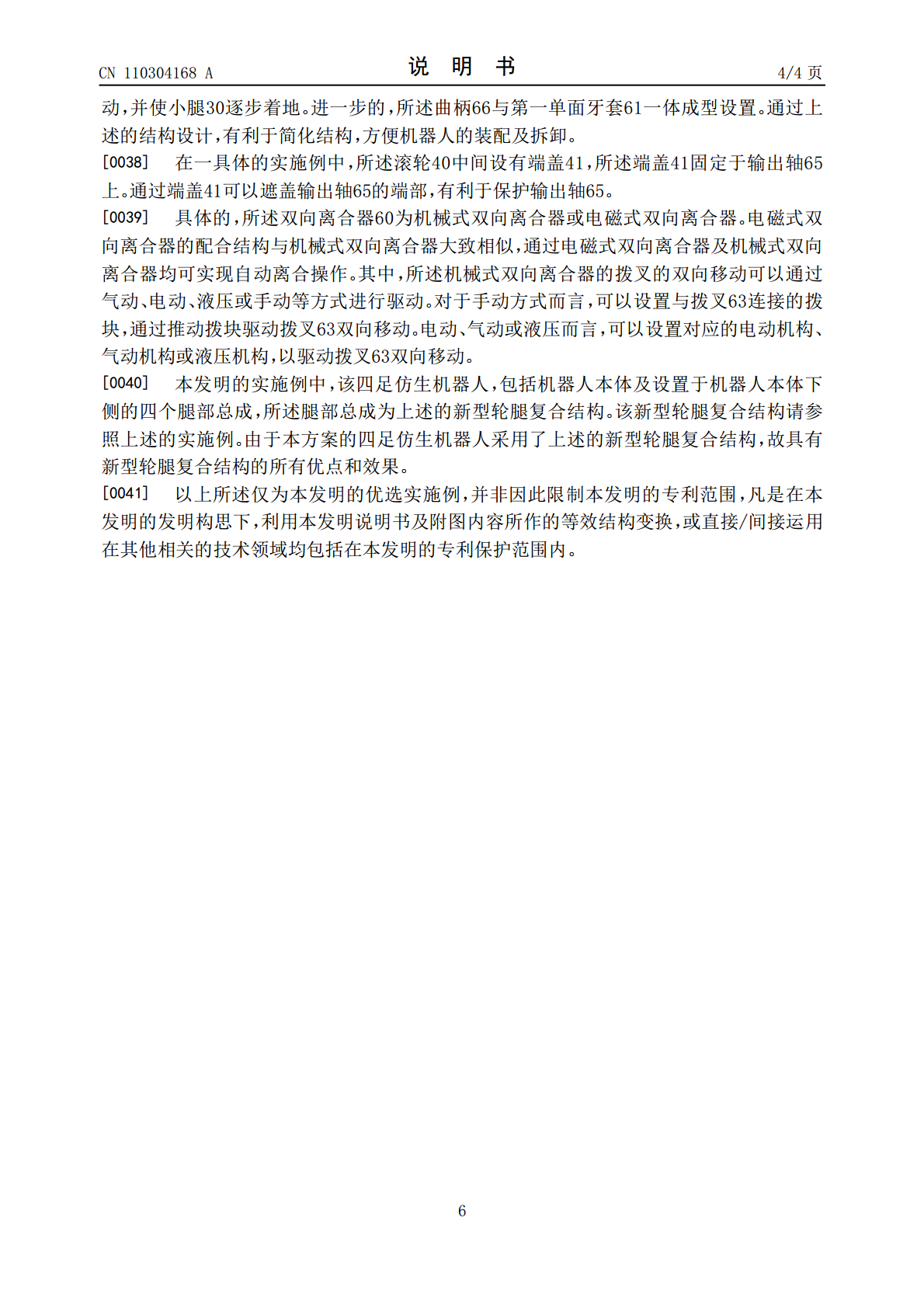
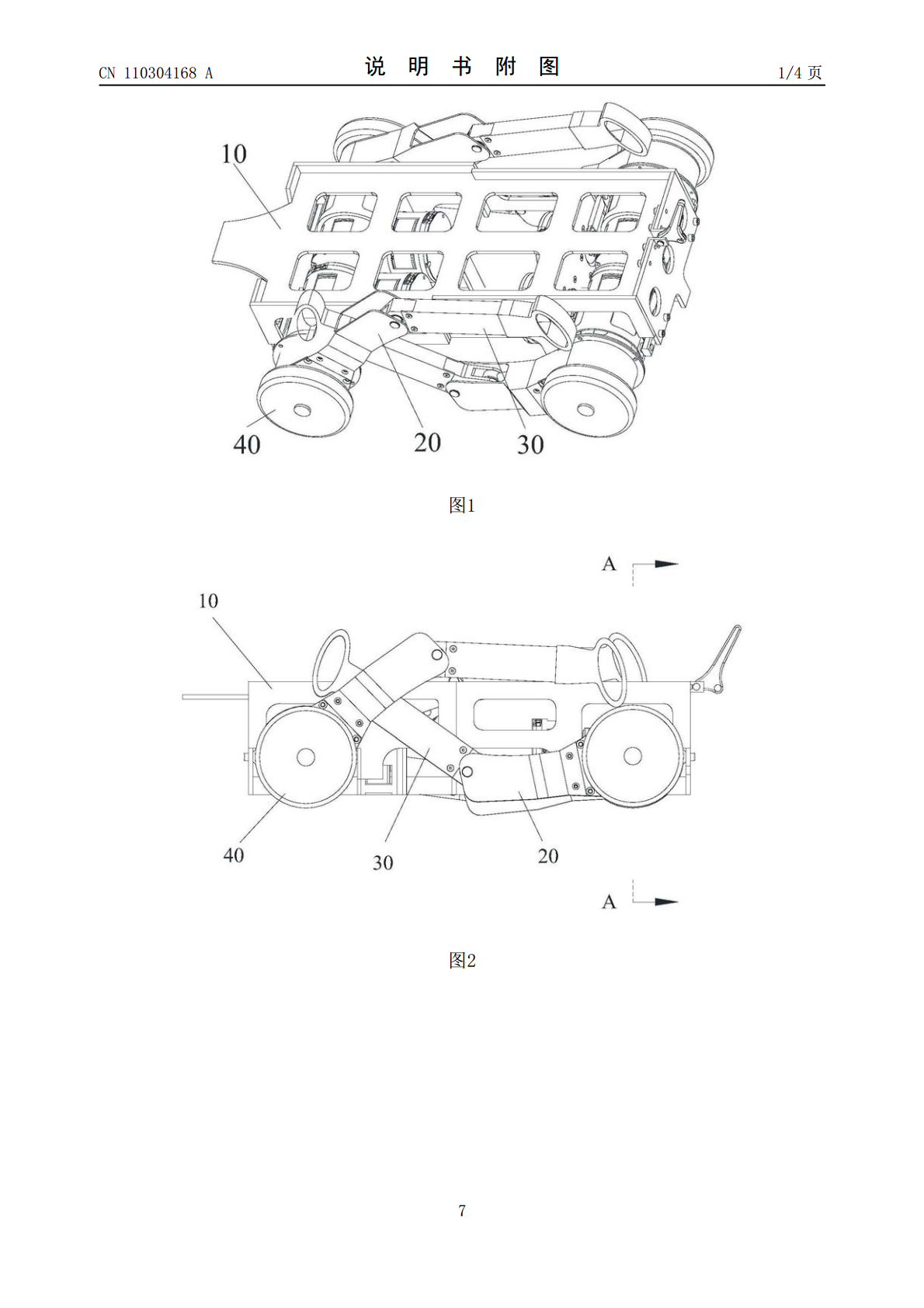
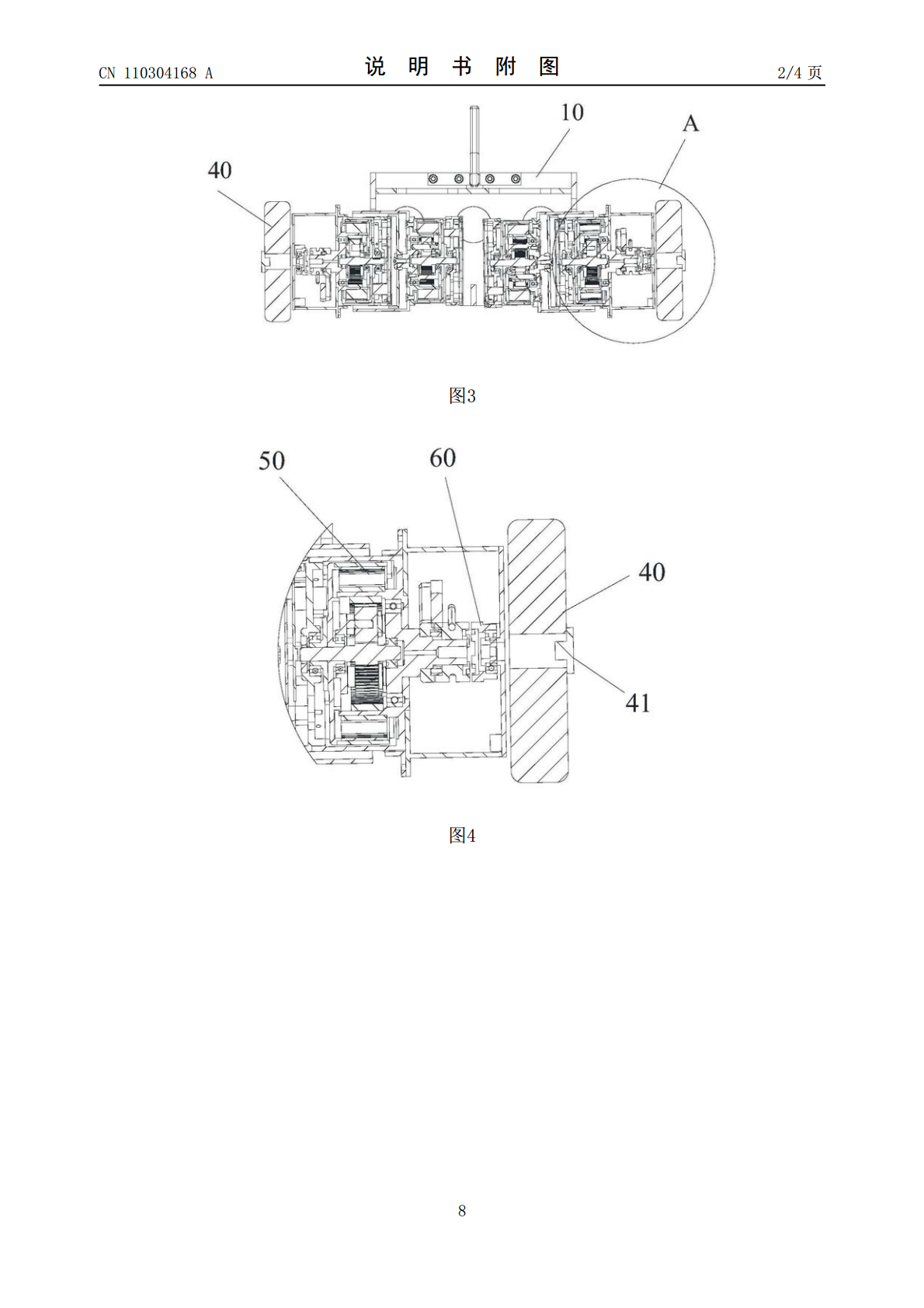
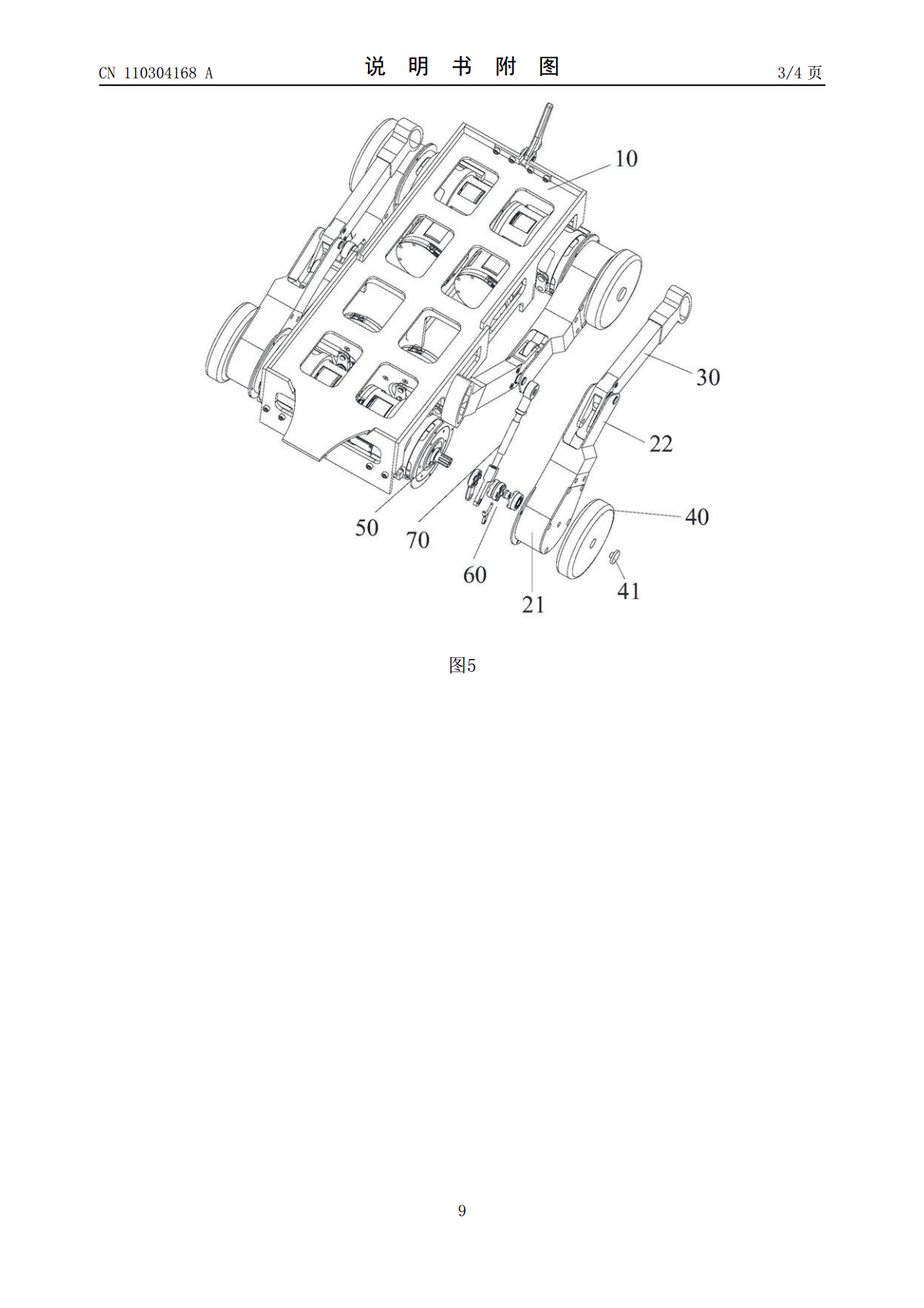
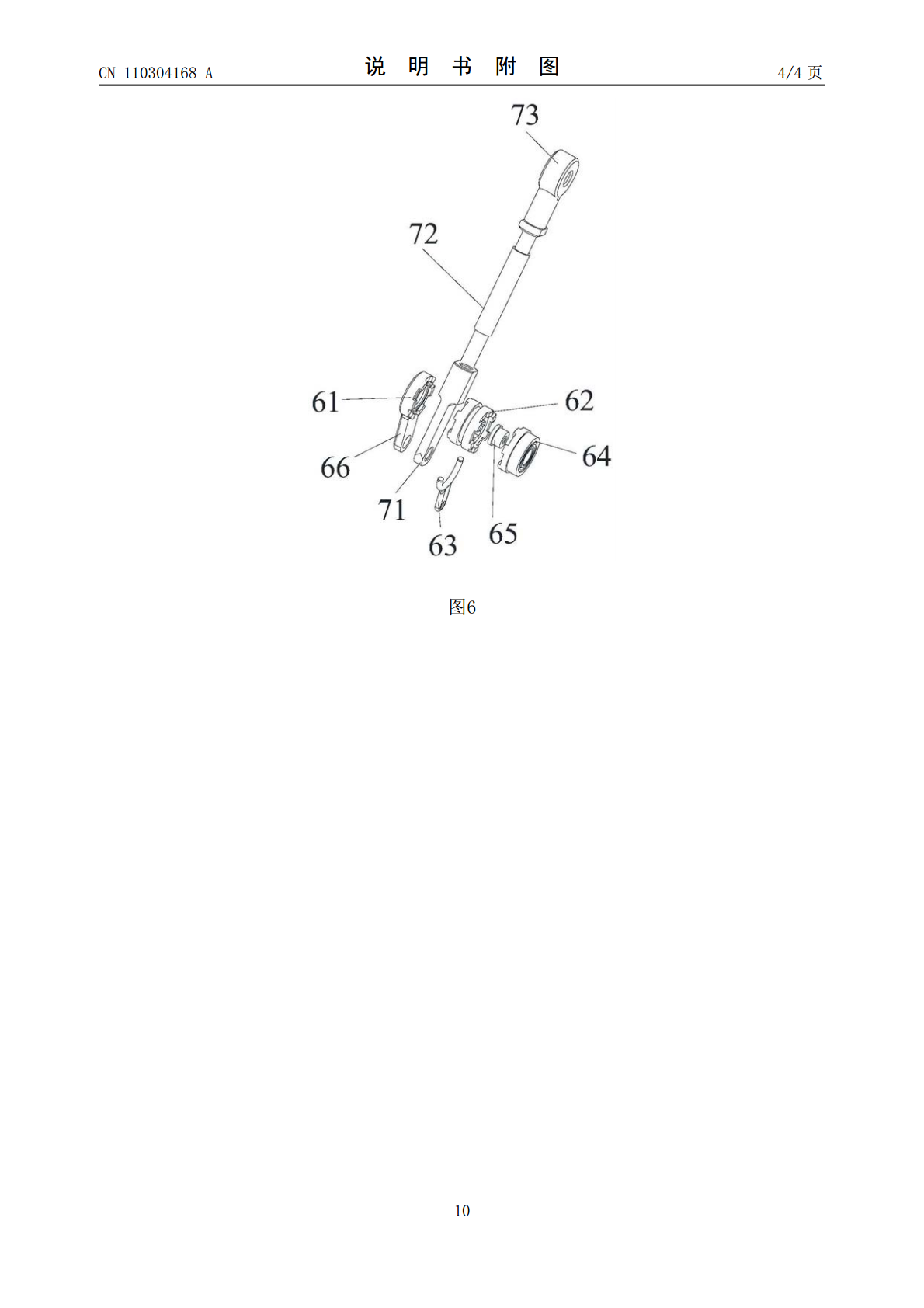
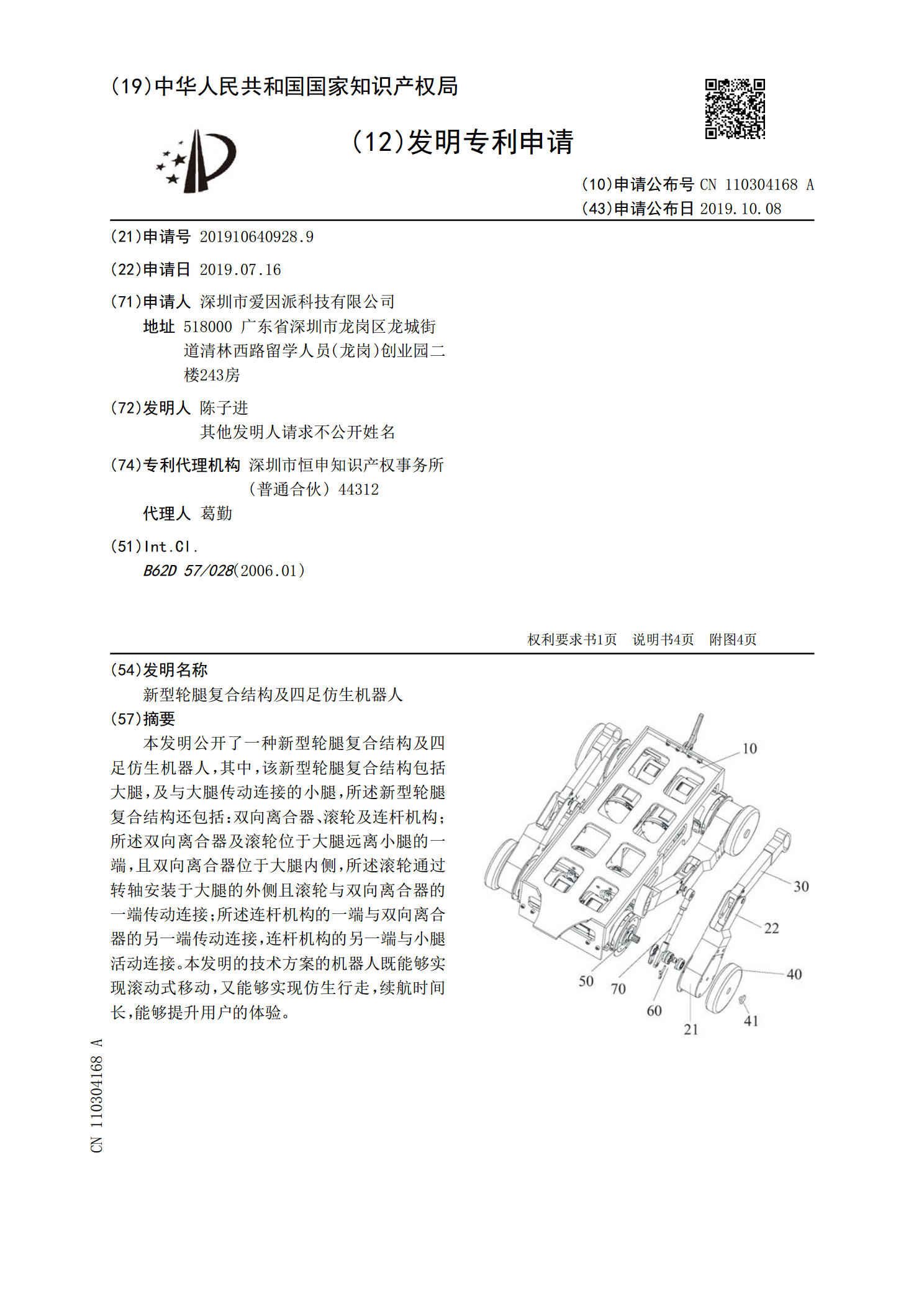
本发明公开了一种新型轮腿复合结构及四足仿生机器人,其中,该新型轮腿复合结构包括大腿,及与大腿传动连接的小腿,所述新型轮腿复合结构还包括:双向离合器、滚轮及连杆机构;所述双向离合器及滚轮位于大腿远离小腿的一端,且双向离合器位于大腿内侧,所述滚轮通过转轴安装于大腿的外侧且滚轮与双向离合器的一端传动连接;所述连杆机构的一端与双向离合器的另一端传动连接,连杆机构的另一端与小腿活动连接。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。
轮腿复合结构及轮腿复合四足仿生机器人.pdf
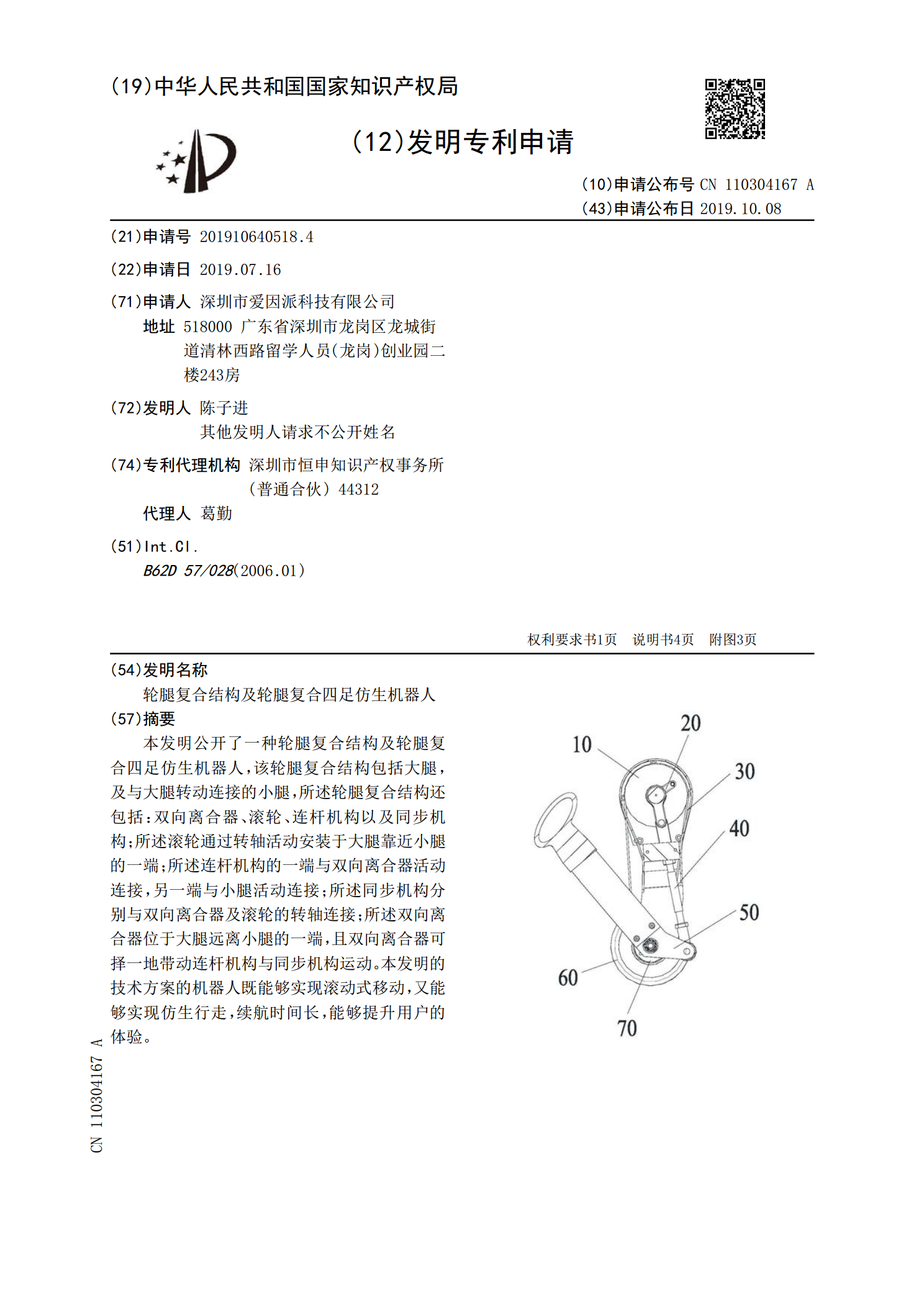
本发明公开了一种轮腿复合结构及轮腿复合四足仿生机器人,该轮腿复合结构包括大腿,及与大腿转动连接的小腿,所述轮腿复合结构还包括:双向离合器、滚轮、连杆机构以及同步机构;所述滚轮通过转轴活动安装于大腿靠近小腿的一端;所述连杆机构的一端与双向离合器活动连接,另一端与小腿活动连接;所述同步机构分别与双向离合器及滚轮的转轴连接;所述双向离合器位于大腿远离小腿的一端,且双向离合器可择一地带动连杆机构与同步机构运动。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。
新型轮爬复合式四足机器人.pdf
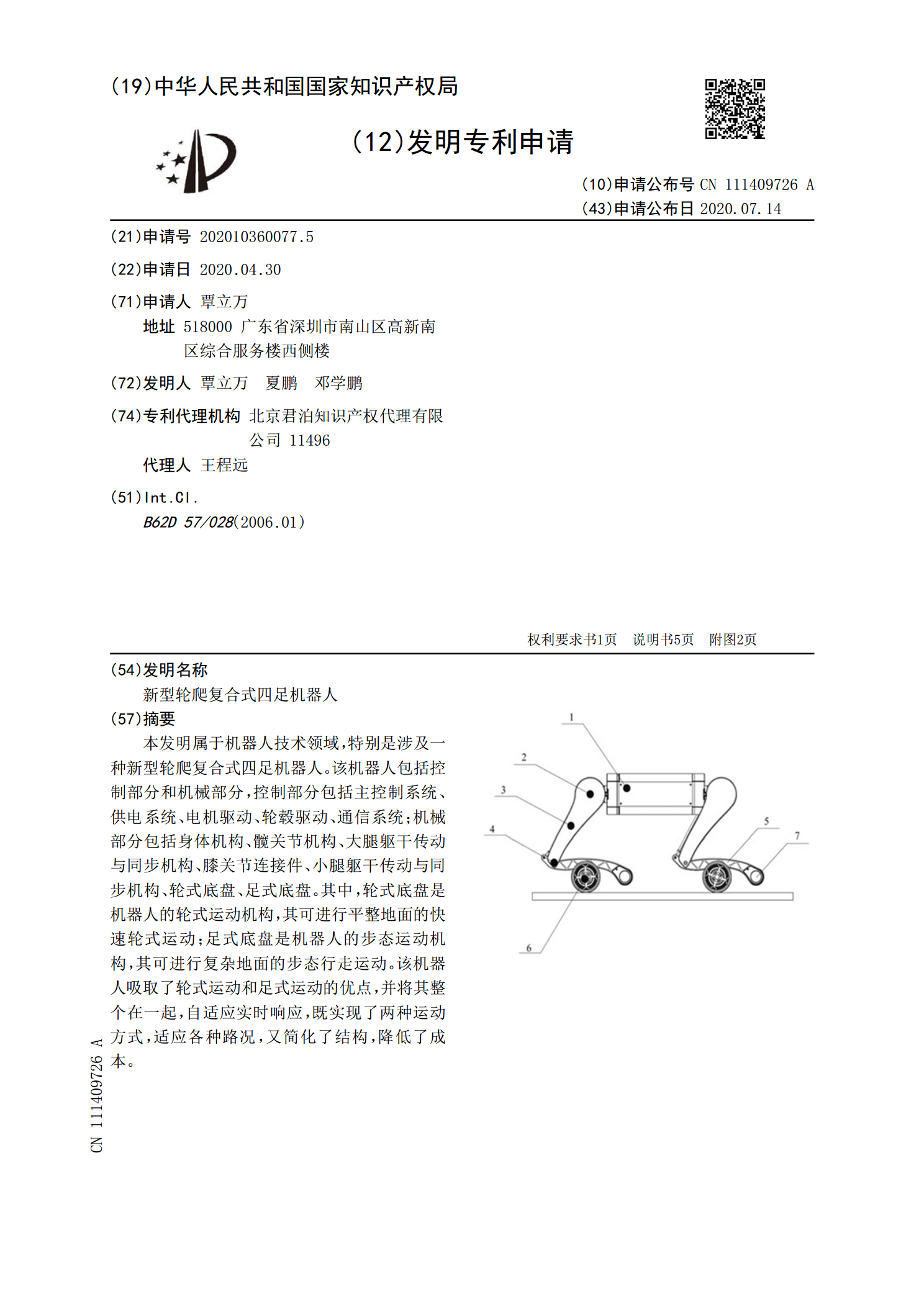
本发明属于机器人技术领域,特别是涉及一种新型轮爬复合式四足机器人。该机器人包括控制部分和机械部分,控制部分包括主控制系统、供电系统、电机驱动、轮毂驱动、通信系统;机械部分包括身体机构、髋关节机构、大腿躯干传动与同步机构、膝关节连接件、小腿躯干传动与同步机构、轮式底盘、足式底盘。其中,轮式底盘是机器人的轮式运动机构,其可进行平整地面的快速轮式运动;足式底盘是机器人的步态运动机构,其可进行复杂地面的步态行走运动。该机器人吸取了轮式运动和足式运动的优点,并将其整个在一起,自适应实时响应,既实现了两种运动方式,适

基于ADAMS的四足仿生机器人单腿结构设计.docx
基于ADAMS的四足仿生机器人单腿结构设计摘要:本文基于ADAMS仿真软件,设计了一种四足仿生机器人的单腿结构,并对其进行了动力学仿真分析。通过对仿真结果的分析,证明设计的单腿结构能够满足运动稳定性和承载性的要求。本文的研究成果对于进一步提高四足仿生机器人的动力学性能具有重要意义。关键词:ADAMS;仿生机器人;单腿结构;动力学仿真;稳定性;承载性一、绪论随着机器人技术的发展,仿生机器人日益成为研究热点。仿生机器人是一种模仿生物学原理、结构、行为打造的机器人,并具有很高的适应性和灵活性。四足仿生机器人是其

仿生四足机器人单腿轨迹规划研究.docx
仿生四足机器人单腿轨迹规划研究摘要仿生四足机器人的研究已成为机器人领域研究的热点。单腿轨迹规划是仿生四足机器人实现稳定行走的重要构成部分。本文介绍了仿生四足机器人的原理及其单腿的结构,阐述了单腿运动的基本规律,提出了单腿轨迹规划的方法,并通过仿真实验验证了方法的有效性。关键词:仿生四足机器人;单腿轨迹规划;稳定行走;仿真实验。AbstractTheresearchonbionicquadrupedrobotshasbecomeahotspotinthefieldofrobotics.Singlelegtr