
清扫系统及其控制方法.pdf

光誉****君哥

1/9
2/9
3/9

4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

清扫系统及其控制方法.pdf
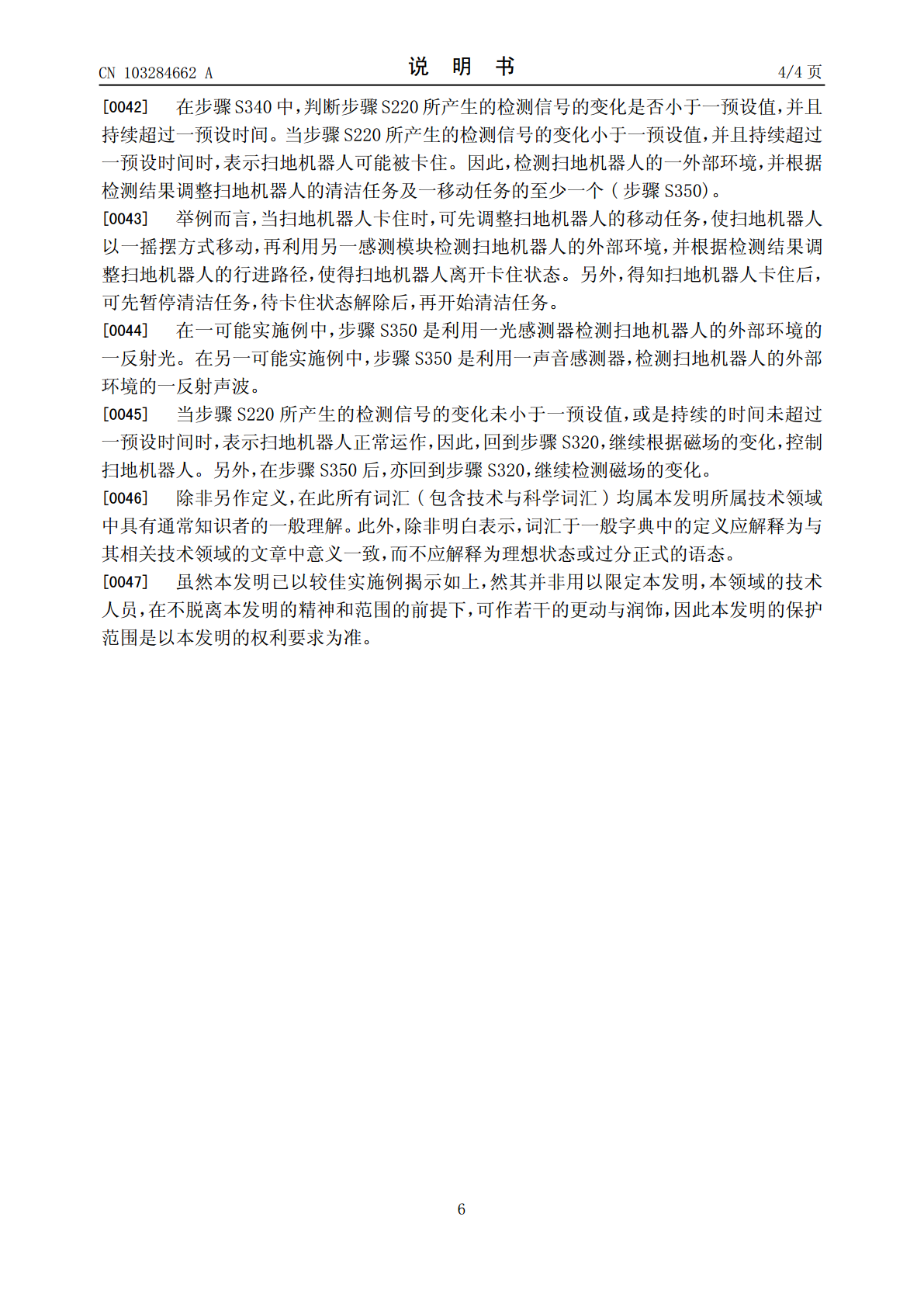
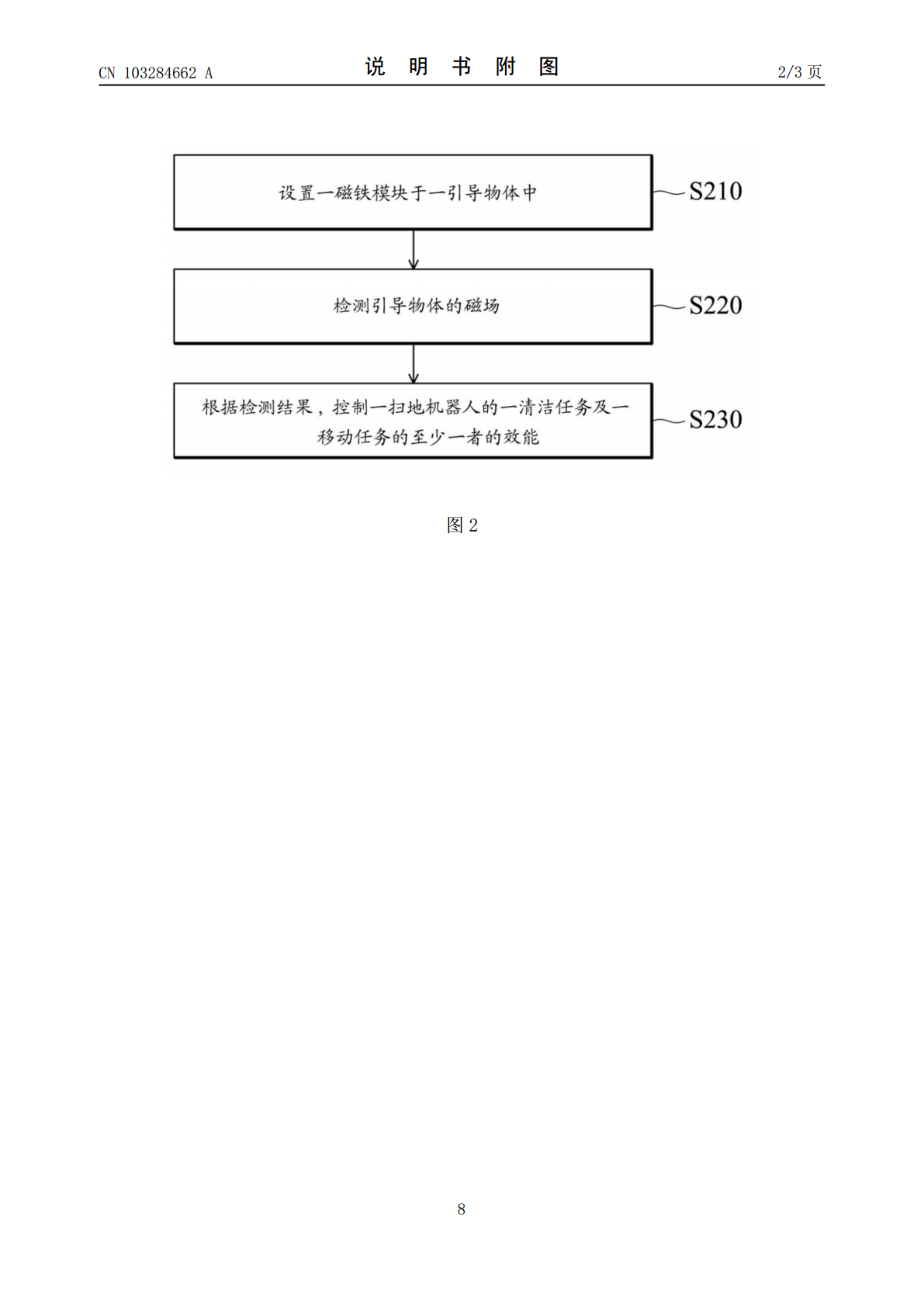
本发明涉及一种清扫系统及其控制方法。该清扫系统,包括一引导物体以及一扫地机器人。引导物体具有一磁铁模块,用以形成一磁场。扫地机器人包括,一操作模块、一第一感测模块以及一控制模块。操作模块根据一控制信号,进行一清洁任务以及一移动任务。第一感测模块根据该磁场,产生一第一检测信号。控制模块根据第一检测信号,产生控制信号,用以调整清洁任务以及移动任务的至少一个的效能。

高炉喷煤系统在线自动清扫装置及其控制方法.pdf
本发明公开了一种高炉喷煤系统在线自动清扫装置及其控制方法。特点是在喷吹主管道上安装过滤器与备用过滤器,过滤器上安装第一气动球阀、第一过滤板、第一正吹阀和第一反吹阀,过滤器通过第一连接管与喷煤返粉管路相连接;备用过滤器上安装第二气动球阀、第二过滤板、第二正吹阀和第二反吹阀,备用过滤器通过第二连接管与喷煤返粉管路相连接。本案的控制方法采用智能化控制煤粉吹扫,能够利用过滤器前后产生的压差判断设定的喷吹是否安全以及煤粉过滤器的堵塞程度,进而及时做出相应处理;自动反吹清理过滤器在使用时无需人员值守,大大降低工人劳动
异物清扫装置、无线充电异物清扫系统以及其控制方法.pdf
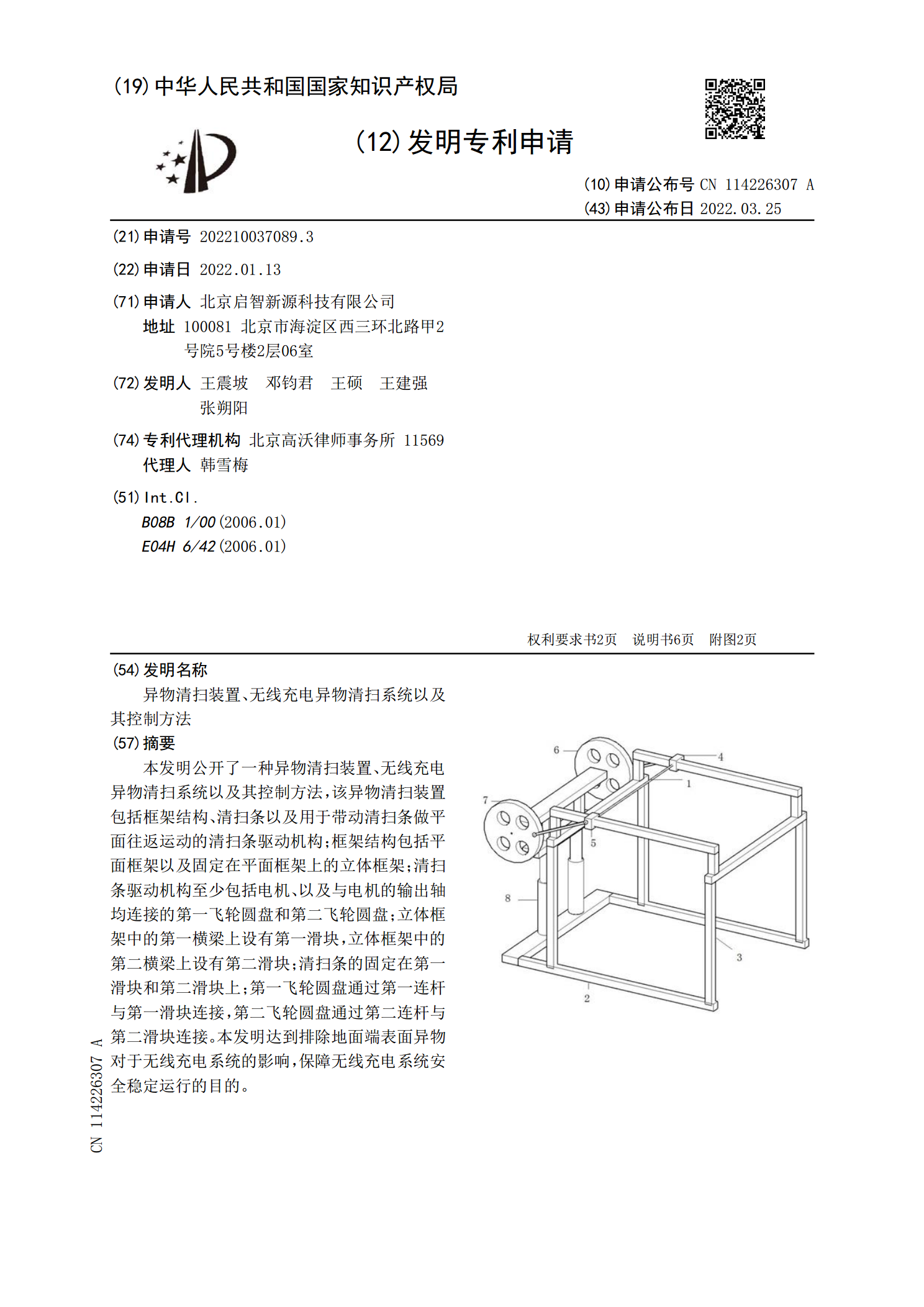
本发明公开了一种异物清扫装置、无线充电异物清扫系统以及其控制方法,该异物清扫装置包括框架结构、清扫条以及用于带动清扫条做平面往返运动的清扫条驱动机构;框架结构包括平面框架以及固定在平面框架上的立体框架;清扫条驱动机构至少包括电机、以及与电机的输出轴均连接的第一飞轮圆盘和第二飞轮圆盘;立体框架中的第一横梁上设有第一滑块,立体框架中的第二横梁上设有第二滑块;清扫条的固定在第一滑块和第二滑块上;第一飞轮圆盘通过第一连杆与第一滑块连接,第二飞轮圆盘通过第二连杆与第二滑块连接。本发明达到排除地面端表面异物对于无线充

智能清扫器及其控制方法.pdf
本发明提供了一种智能清扫器,包括电动执行器、扭矩传感器、联轴器、过渡器、缓冲装置、清扫组件和左侧连接架为右侧连接架;所述的电动执行器的输出轴与过渡套套接,过渡套、扭矩传感器、联轴器依次连接;所述的电动执行器通过L型异形支撑架固定在左侧连接架的底部;所述的缓冲装置固定在左侧连接架上并将联轴器一端套接;左侧连接架为右侧连接架固接在外部输送机的机架上;电动执行器、扭矩传感器分别与PLC控制器电连接。本发明智能清扫器具有自动补偿的功能,当智能清扫装置刀片磨损过量时,可发生报警信号,提醒更换,也可以根据刀片的磨损程

建筑物外立面机器人清扫系统及其清扫方法.pdf
本发明公开了一种建筑物外立面机器人清扫系统,本发明还公开了一种使用该机器人清扫系统的清扫方法,在安装支架上悬挂作业缆绳,作业缆绳底端连接在卷扬机上,在所述作业缆绳上设有清扫机器人,清扫机器人上转动连接有具有卷持轮及其驱动装置,作业缆绳穿入清扫机器人并且绕卷持轮一圈或一圈以上,所述清扫机器人一表面上固定设有三根或三根以上的伸缩支撑臂,在具有伸缩支撑臂的清扫机器人表面上还转动连接有清扫臂及其转动驱动装置,清扫壁顶端部固定连接清扫毛刷。本发明可彻底的将高空清扫工人从危险恶劣的环境解脱出来,提高了工作