
智能清扫器及其控制方法.pdf

努力****振宇

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能清扫器及其控制方法.pdf
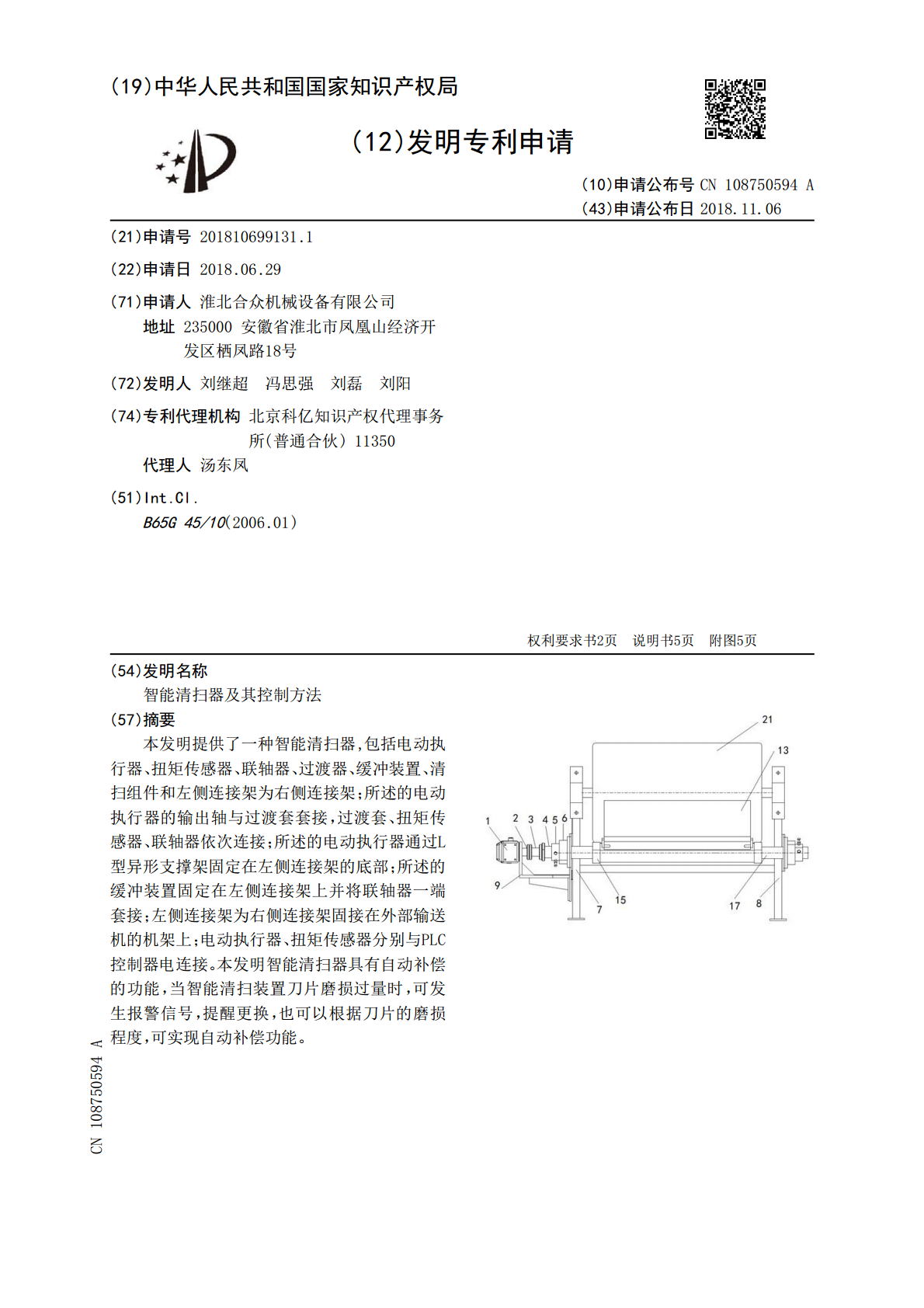
本发明提供了一种智能清扫器,包括电动执行器、扭矩传感器、联轴器、过渡器、缓冲装置、清扫组件和左侧连接架为右侧连接架;所述的电动执行器的输出轴与过渡套套接,过渡套、扭矩传感器、联轴器依次连接;所述的电动执行器通过L型异形支撑架固定在左侧连接架的底部;所述的缓冲装置固定在左侧连接架上并将联轴器一端套接;左侧连接架为右侧连接架固接在外部输送机的机架上;电动执行器、扭矩传感器分别与PLC控制器电连接。本发明智能清扫器具有自动补偿的功能,当智能清扫装置刀片磨损过量时,可发生报警信号,提醒更换,也可以根据刀片的磨损程

智能吸尘器控制系统及智能吸尘器清扫方法.pdf
本发明公开了一种智能吸尘器控制系统包括:智能控制模块,接收信号,并依据接收到的信号向吸尘器轮子的驱动电机发送动作指令;障碍探测模块探测吸尘器行进路线中的障碍物,并转化成控制信号发送给所述智能控制模块;角度感应模块,感应所述吸尘器旋转的角度,并将感应到的角度转化成控制信号发送给所述智能控制模块。通过本发明,能够实现区域的完全清扫,不会重复清扫,清扫效率高。本发明同时公开了利用上述技术方案中任一所述的智能吸尘器控制系统控制智能吸尘器清扫的方法。
智能配网控制器及其控制方法.pdf
本发明公开一种智能配网控制器,主要包括:通讯接口,用于接收来自控制终端及上送控制器的数据信息;处理器,用于解析和处理数据信息,并下发操作指令;继电器输出模块,用于根据上述操作指令,利用控制器内部提供的信号源,驱动手车/地刀的电机转动,到达指定位置后,并触动一触发信号;或驱动断路器的中间继电器吸合,实现断路器合闸/分闸操作;开关量输入模块,采集上述触发信号,并反馈给处理器,处理器切断继电器输出,控制驱动手车/地刀的电机制动;显示模块,显示断路器、地刀状态及单线图,以及系统控制操作界面。本发明了实现对中置柜各

清扫系统及其控制方法.pdf
本发明涉及一种清扫系统及其控制方法。该清扫系统,包括一引导物体以及一扫地机器人。引导物体具有一磁铁模块,用以形成一磁场。扫地机器人包括,一操作模块、一第一感测模块以及一控制模块。操作模块根据一控制信号,进行一清洁任务以及一移动任务。第一感测模块根据该磁场,产生一第一检测信号。控制模块根据第一检测信号,产生控制信号,用以调整清洁任务以及移动任务的至少一个的效能。

智能清扫设备的控制方法、控制装置及智能系统.pdf
本申请提供了一种智能清扫设备的控制方法、控制装置及智能系统,该方法包括:在预定区域内存在用户的情况下,获取第一目标区域的位置信息和用户状态,第一目标区域为预定区域中用户所在的区域,用户状态包括免打扰状态以及非免打扰状态;根据第一目标区域的位置信息以及用户状态,控制智能清扫设备至少在第二目标区域工作,第二目标区域为预定区域中除第一目标区域之外的区域。本申请的该方法在待清扫区域中存在用户的情况下,可以根据用户状态以及用户所在的第一目标区域来确定智能清扫设备的工作区域,保证了智能清扫设备的智能化程度较高,以及保