
建筑物外立面机器人清扫系统及其清扫方法.pdf

康平****ng


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

建筑物外立面机器人清扫系统及其清扫方法.pdf
本发明公开了一种建筑物外立面机器人清扫系统,本发明还公开了一种使用该机器人清扫系统的清扫方法,在安装支架上悬挂作业缆绳,作业缆绳底端连接在卷扬机上,在所述作业缆绳上设有清扫机器人,清扫机器人上转动连接有具有卷持轮及其驱动装置,作业缆绳穿入清扫机器人并且绕卷持轮一圈或一圈以上,所述清扫机器人一表面上固定设有三根或三根以上的伸缩支撑臂,在具有伸缩支撑臂的清扫机器人表面上还转动连接有清扫臂及其转动驱动装置,清扫壁顶端部固定连接清扫毛刷。本发明可彻底的将高空清扫工人从危险恶劣的环境解脱出来,提高了工作
水下清洁机器人节能清扫结构及其清扫方法.pdf
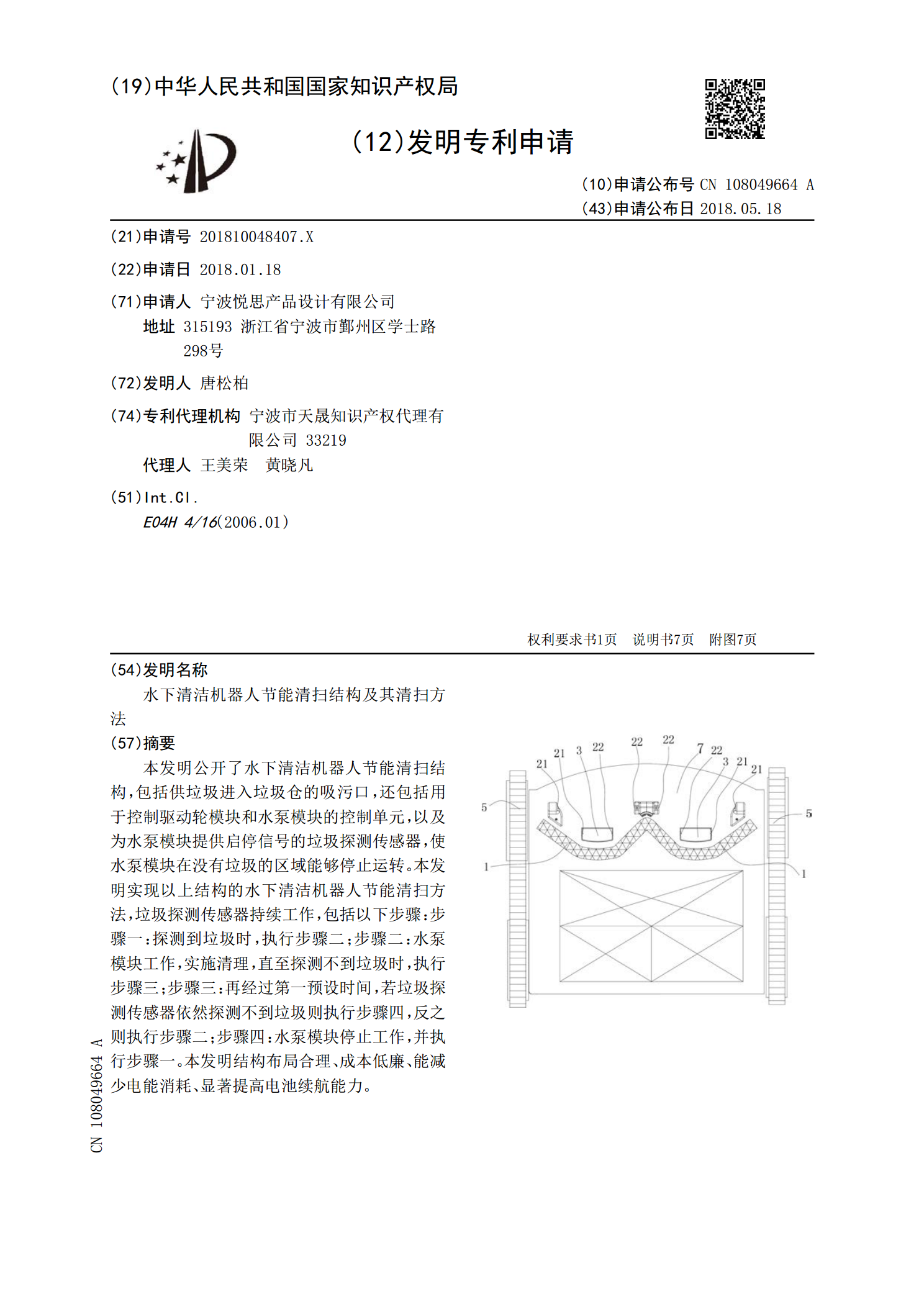
本发明公开了水下清洁机器人节能清扫结构,包括供垃圾进入垃圾仓的吸污口,还包括用于控制驱动轮模块和水泵模块的控制单元,以及为水泵模块提供启停信号的垃圾探测传感器,使水泵模块在没有垃圾的区域能够停止运转。本发明实现以上结构的水下清洁机器人节能清扫方法,垃圾探测传感器持续工作,包括以下步骤:步骤一:探测到垃圾时,执行步骤二;步骤二:水泵模块工作,实施清理,直至探测不到垃圾时,执行步骤三;步骤三:再经过第一预设时间,若垃圾探测传感器依然探测不到垃圾则执行步骤四,反之则执行步骤二;步骤四:水泵模块停止工作,并执行步
清洁机器人及其清扫方法.pdf
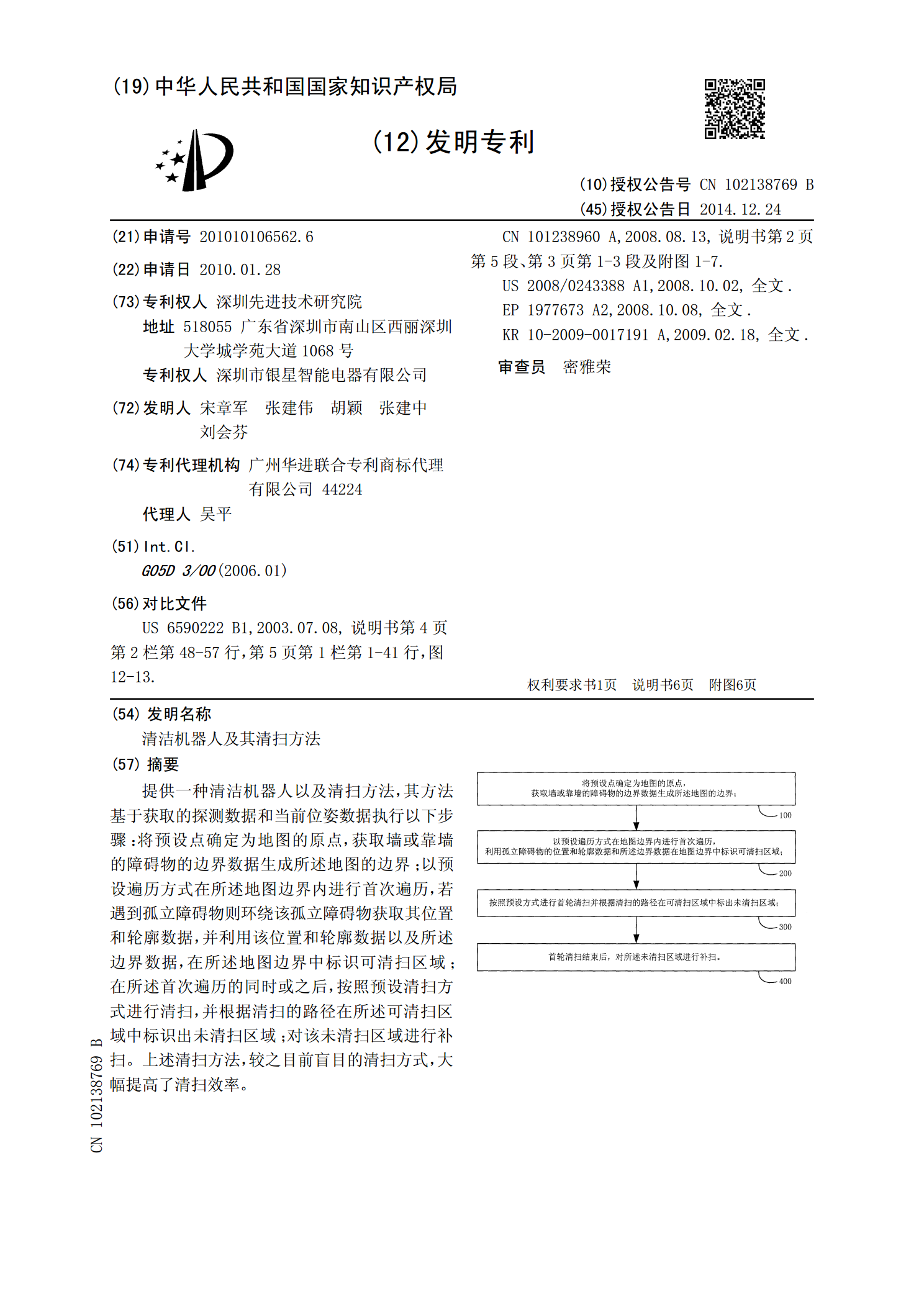
提供一种清洁机器人以及清扫方法,其方法基于获取的探测数据和当前位姿数据执行以下步骤:将预设点确定为地图的原点,获取墙或靠墙的障碍物的边界数据生成所述地图的边界;以预设遍历方式在所述地图边界内进行首次遍历,若遇到孤立障碍物则环绕该孤立障碍物获取其位置和轮廓数据,并利用该位置和轮廓数据以及所述边界数据,在所述地图边界中标识可清扫区域;在所述首次遍历的同时或之后,按照预设清扫方式进行清扫,并根据清扫的路径在所述可清扫区域中标识出未清扫区域;对该未清扫区域进行补扫。上述清扫方法,较之目前盲目的清扫方式,大幅提高了

清扫机器人及清扫系统.pdf
本发明公开了一种清扫机器人及清扫系统,该清扫机器人包括一第一感测单元、一信号产生单元、一控制单元、多个滚轮以及一第二感测单元。第一感测单元根据一外部无线信号,产生一第一感测信号予一传输线。第二感测单元根据一外部环境,产生一第二感测信号。当第一感测单元未侦测到外部无线信号时,信号产生单元令传输线的状态符合预设状态。因此,控制单元产生一移动信号。滚轮根据移动信号而转动。当第一感测单元侦测到外部无线信号时,传输线的状态不符合一预设状态。因此,控制单元根据第二感测信号,调整移动信号。
斜面清扫机器人及清扫系统.pdf
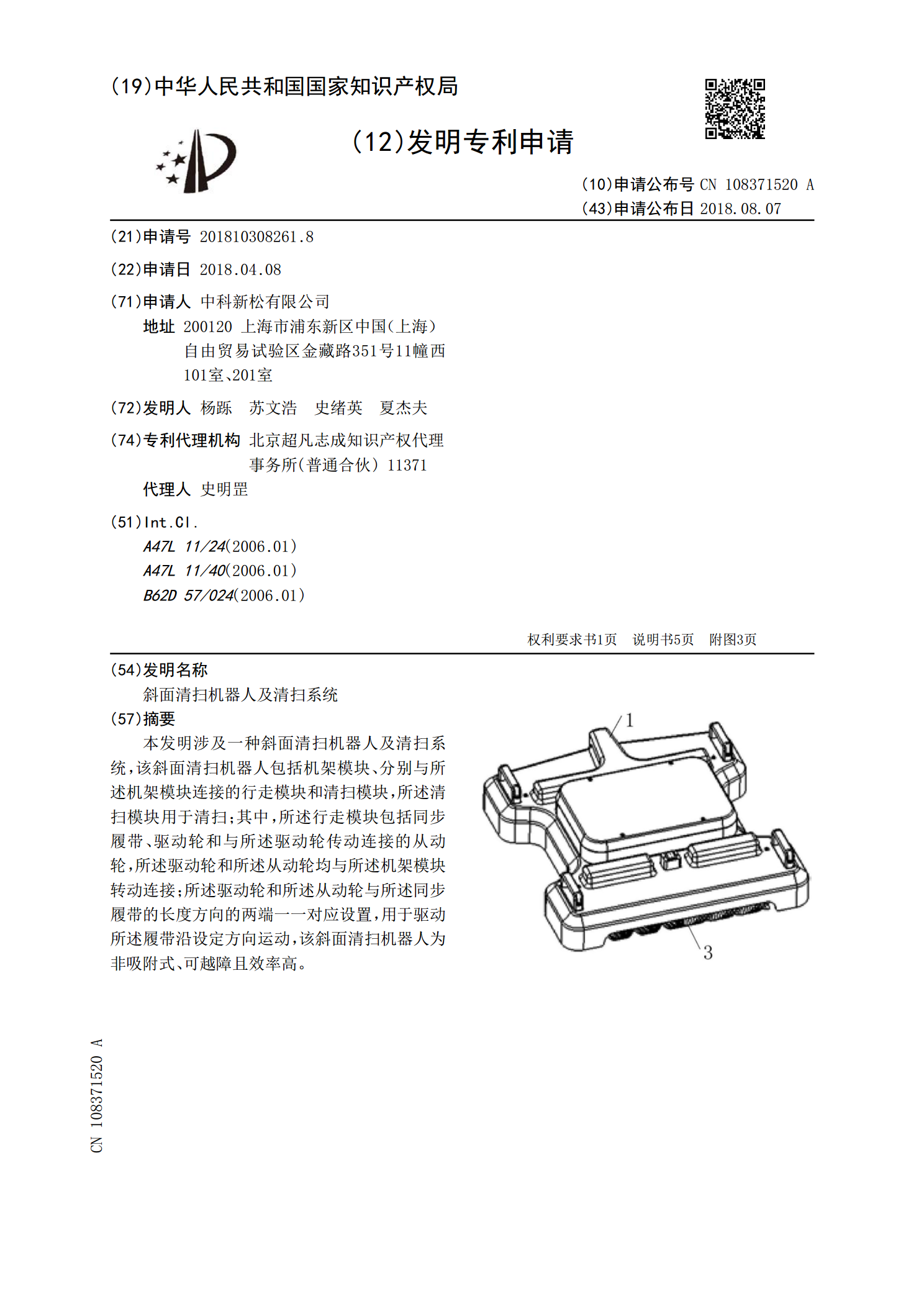
本发明涉及一种斜面清扫机器人及清扫系统,该斜面清扫机器人包括机架模块、分别与所述机架模块连接的行走模块和清扫模块,所述清扫模块用于清扫;其中,所述行走模块包括同步履带、驱动轮和与所述驱动轮传动连接的从动轮,所述驱动轮和所述从动轮均与所述机架模块转动连接;所述驱动轮和所述从动轮与所述同步履带的长度方向的两端一一对应设置,用于驱动所述履带沿设定方向运动,该斜面清扫机器人为非吸附式、可越障且效率高。