
一种可穿戴仿生外骨骼机械腿康复装置的行走控制方法.pdf

猫巷****松臣

1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可穿戴仿生外骨骼机械腿康复装置的行走控制方法.pdf
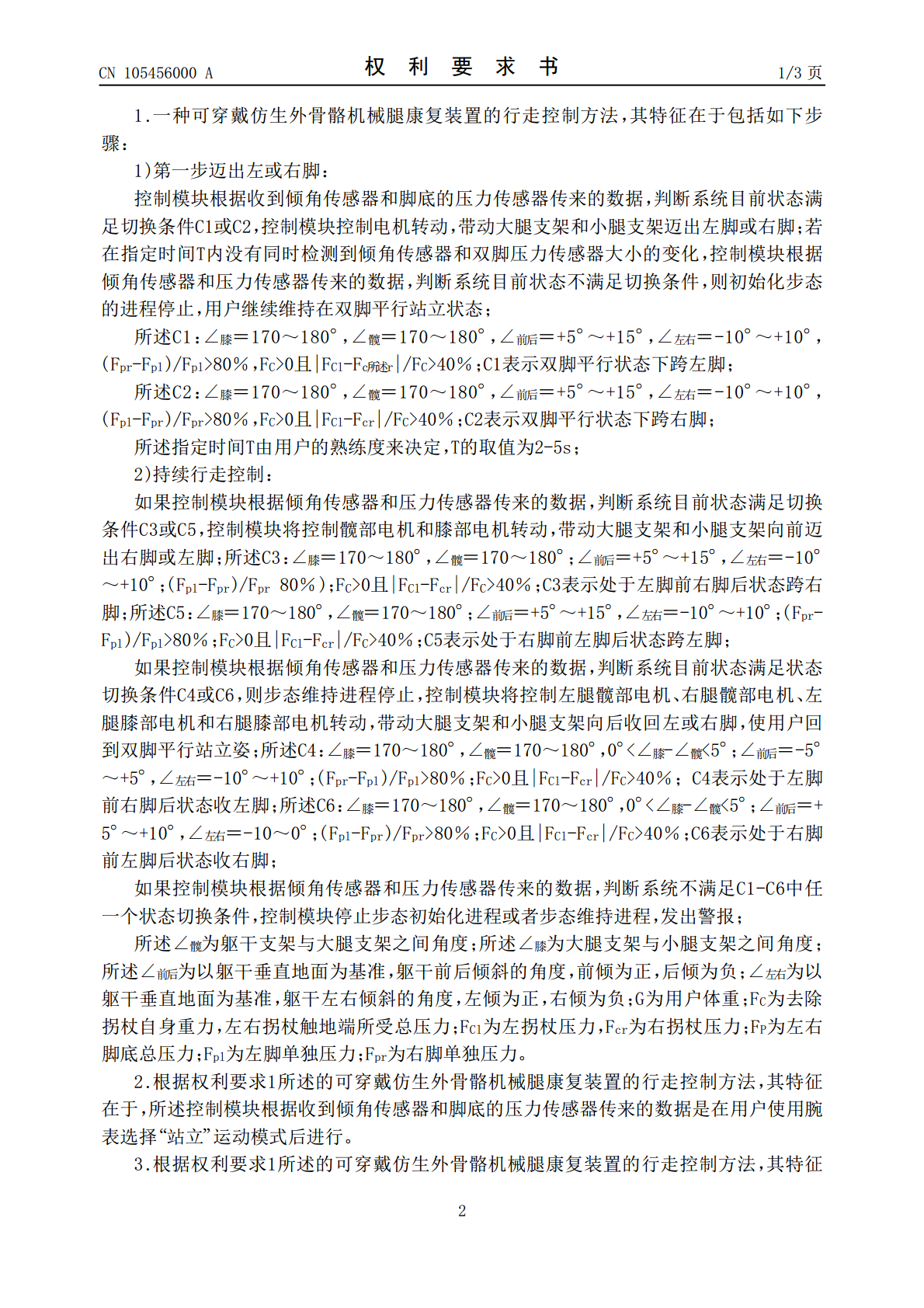
本发明公开了一种可穿戴仿生外骨骼机械腿康复装置的行走控制方法。该方法包括第一步迈出左或右脚和持续行走控制,第一步迈出左或右脚是控制模块根据收到倾角传感器和脚底的压力传感器传来的数据,判断系统目前状态满足切换条件C1或C2,控制模块控制电机转动,带动大腿支架和小腿支架迈出左脚或右脚;持续行走控制包括控制模块根据倾角传感器和压力传感器传来的数据,判断系统目前状态满足切换条件C3或C5,以及满足状态切换条件C4或C6,或者不满足上述条件的处理。对于下肢重度瘫痪的用户,本发明能让用户重新用自己的双脚站起来,进行简
一种仿生外骨骼康复机械手助力装置及方法.pdf
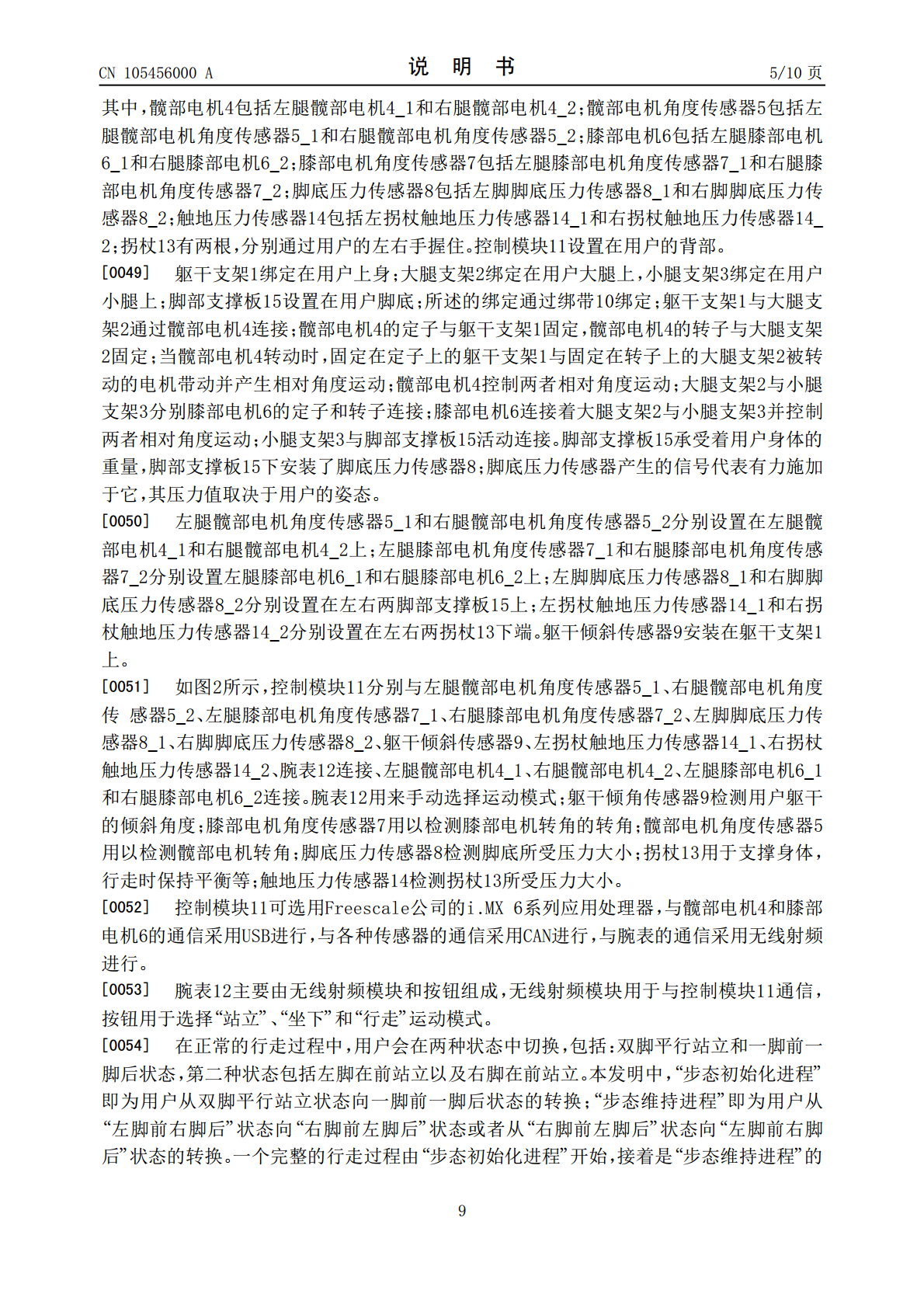
本发明公开了一种仿生外骨骼康复机械手助力装置及方法,包括手指执行机构部分、手臂辅助执行机构部分、肩部机构部分;所述手指执行机构部分通过机械手指底板与手臂辅助执行机构部分相连接,手臂辅助执行机构部分通过肘关节伺服电机进行辅助活动,肩部机构部分包括肩部伺服电机以及肩部旋转伺服电机,辅助完成相应动作。使用者通过手机APP连接电源控制手指伺服电机、肘关节伺服电机、肩部伺服电机和肩部旋转伺服电机同时动作,带动使用者手指运动,实现康复动作。本发明能够针对手部运动功能障碍患者进行康复训练,使手部失去部分人体机能的病人得
一种穿戴式外骨骼助力行走装置.pdf
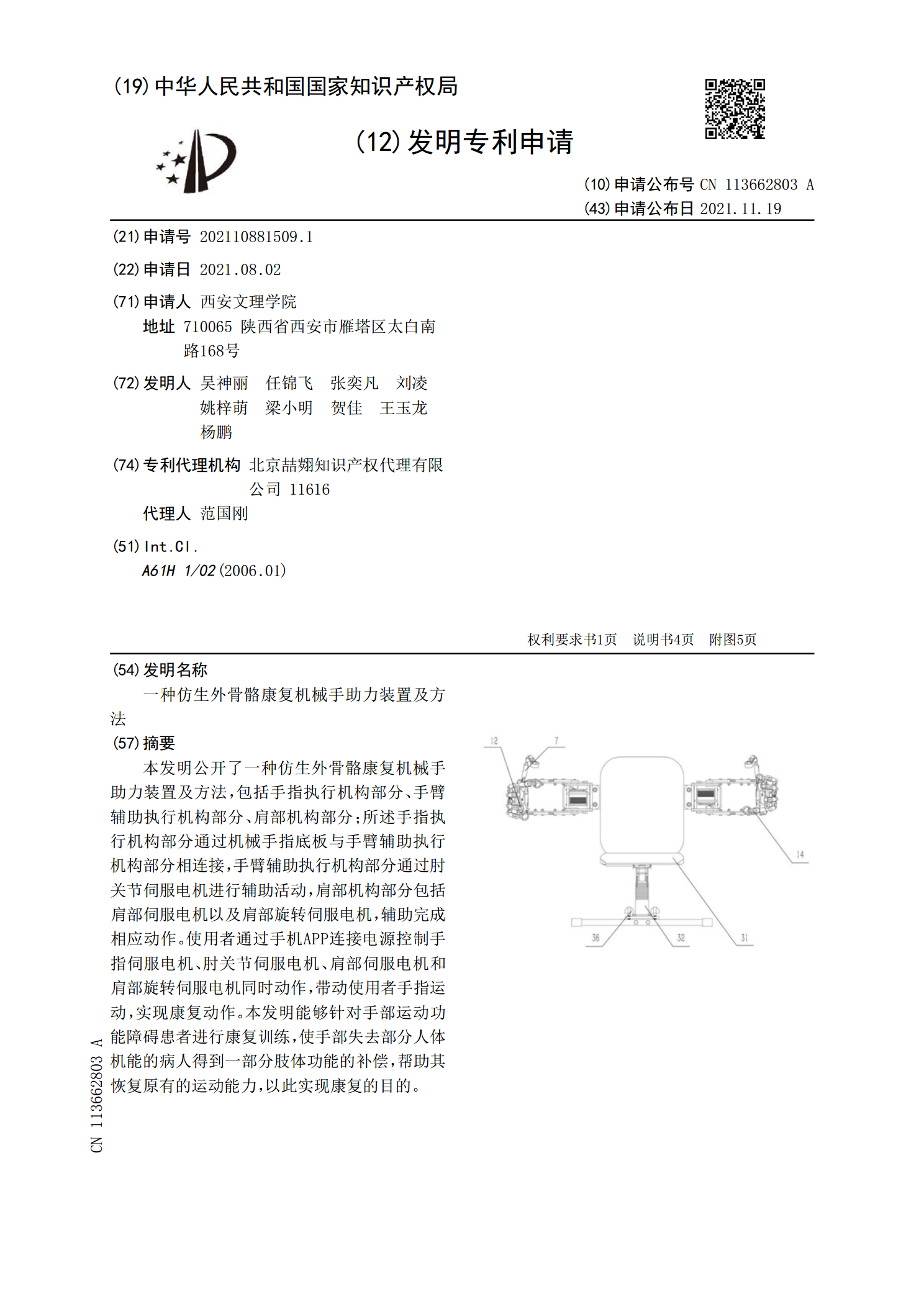
本发明涉及理疗装置领域,具体涉及一种穿戴式外骨骼助力行走装置,包括两个脚部组件、腰部组件和背部组件,脚部组件包括底板和支撑杆,腰部组件包括腰部安装环、两个转动杆和两个助力件,背部组件包括多连杆结构和胸部支撑环,在背上重物时,重物的压力依次通过多连杆结构,腰部安装环,转动杆,助力件和支撑杆传递到地面,从而可以对膝盖和腰部受力进行减压,使得医护人员可以携带更多的物品前进,减小劳累程度。
一种半穿戴式手掌康复外骨骼.pdf
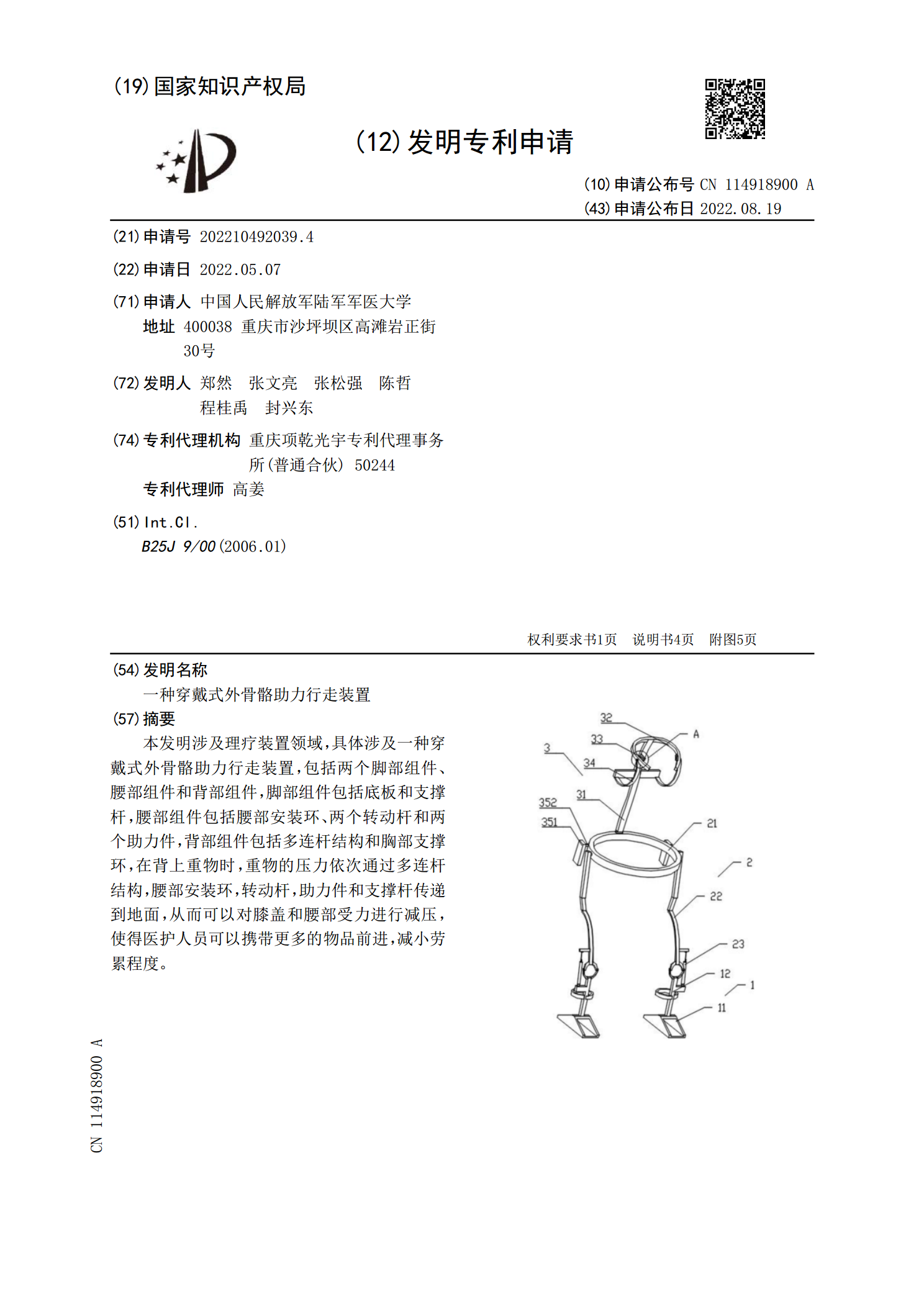
本发明公开了一种半穿戴式手掌康复外骨骼,包括底座,底座上连有可调高托举架,可调高托举架上部背面固定连有大拇指支架,大拇指支架上以及可调高托举架背面设置动力装置,大拇指支架的前端以及可调高托举架的前端铰接连有第一截手指穿戴套环,第一截手指穿戴套环的前端铰接连有第二截手指穿戴套环,第一截推动杆一端铰接连接在第一截手指穿戴套环背面,第一截推动杆上固定连有手指旋转角度调节杆的一端,手指旋转角度调节杆的另一端与第二截推动杆的一端铰接,第二截推动杆的另一端铰接连在第二截手指穿戴套环背面。本发明提供的一种半穿戴式手掌康
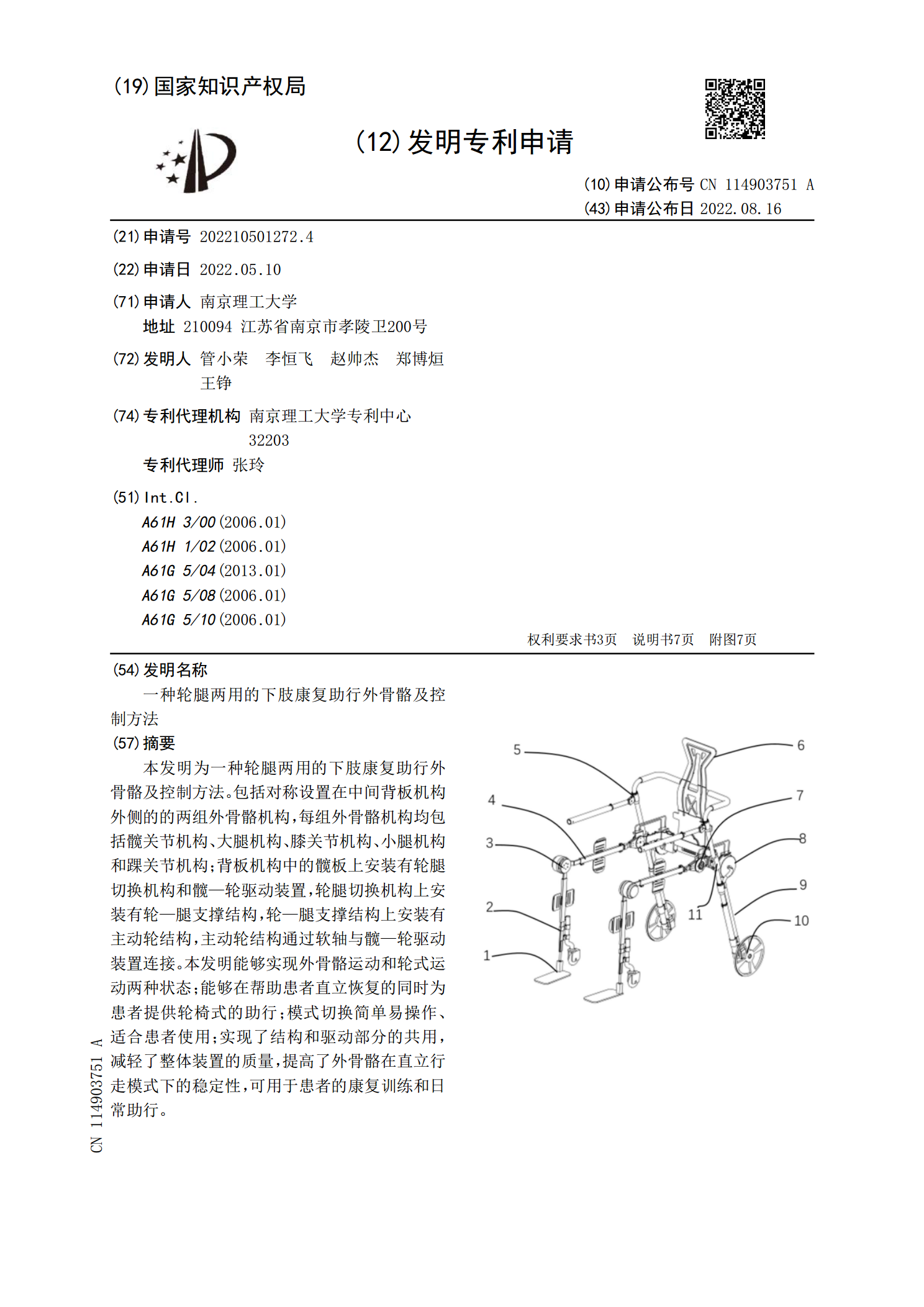
一种轮腿两用的下肢康复助行外骨骼及控制方法.pdf
本发明为一种轮腿两用的下肢康复助行外骨骼及控制方法。包括对称设置在中间背板机构外侧的的两组外骨骼机构,每组外骨骼机构均包括髋关节机构、大腿机构、膝关节机构、小腿机构和踝关节机构;背板机构中的髋板上安装有轮腿切换机构和髋—轮驱动装置,轮腿切换机构上安装有轮—腿支撑结构,轮—腿支撑结构上安装有主动轮结构,主动轮结构通过软轴与髋—轮驱动装置连接。本发明能够实现外骨骼运动和轮式运动两种状态;能够在帮助患者直立恢复的同时为患者提供轮椅式的助行;模式切换简单易操作、适合患者使用;实现了结构和驱动部分的共用,减轻了整体