
一种仿生外骨骼康复机械手助力装置及方法.pdf

斌斌****公主

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种仿生外骨骼康复机械手助力装置及方法.pdf
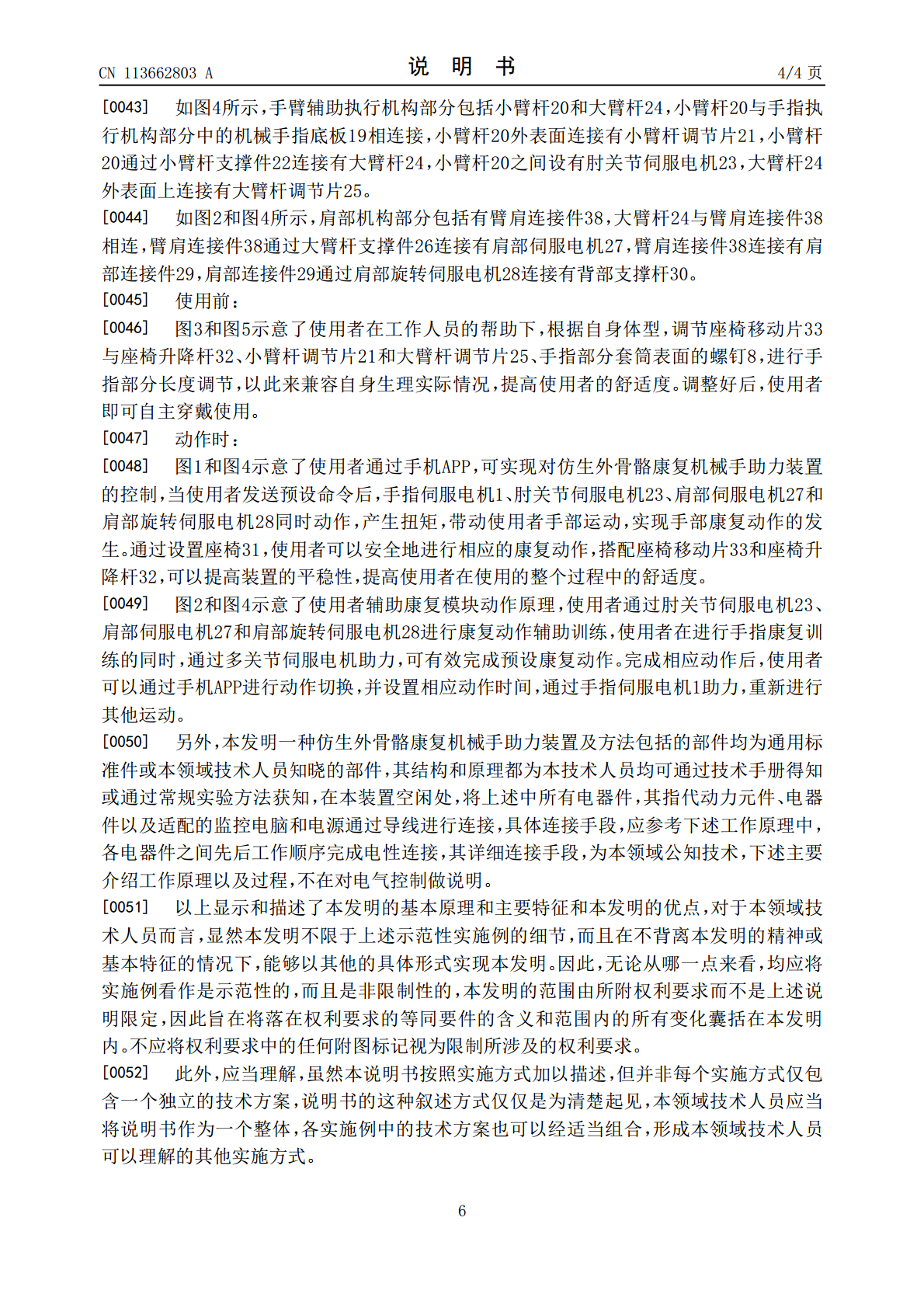
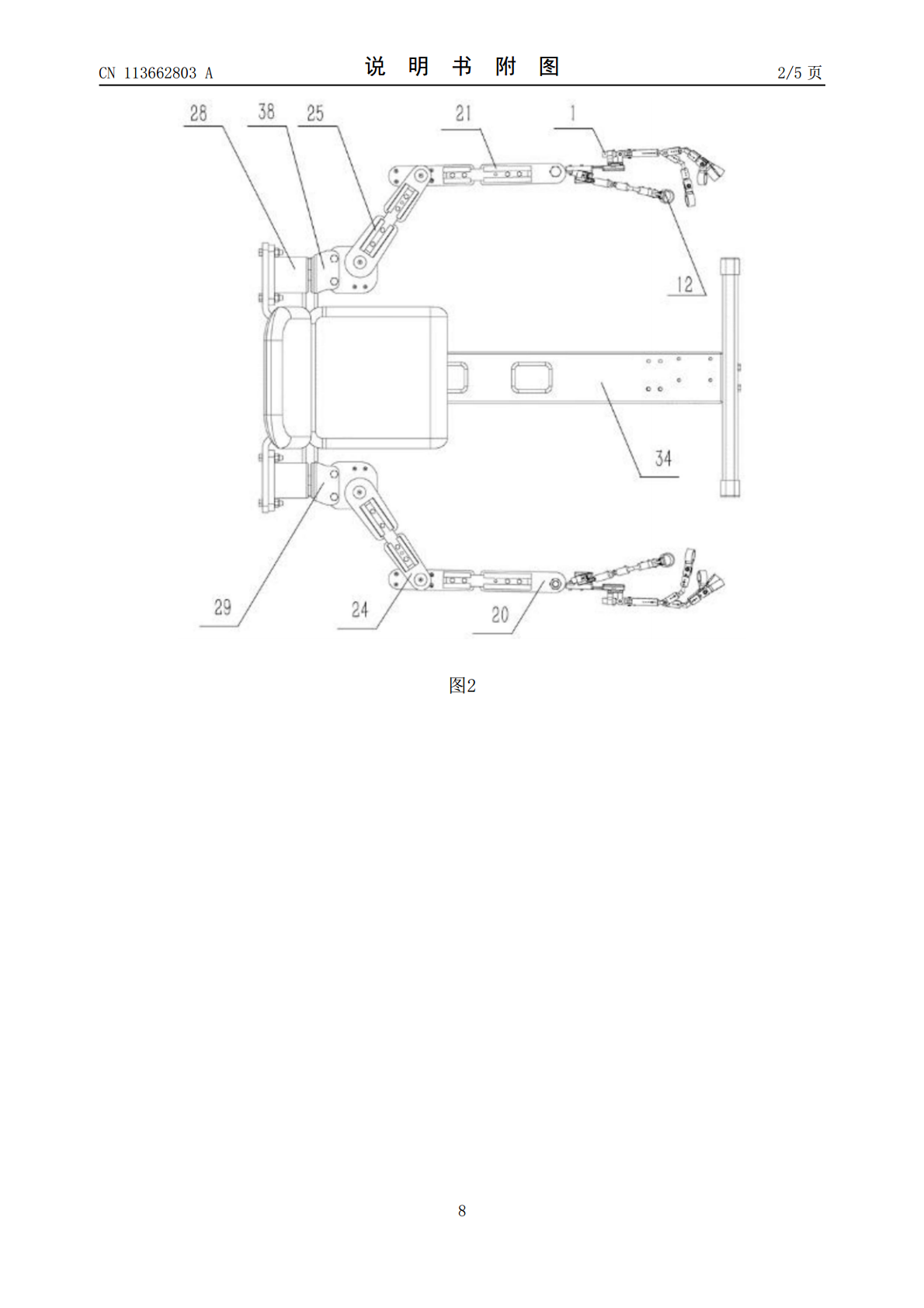
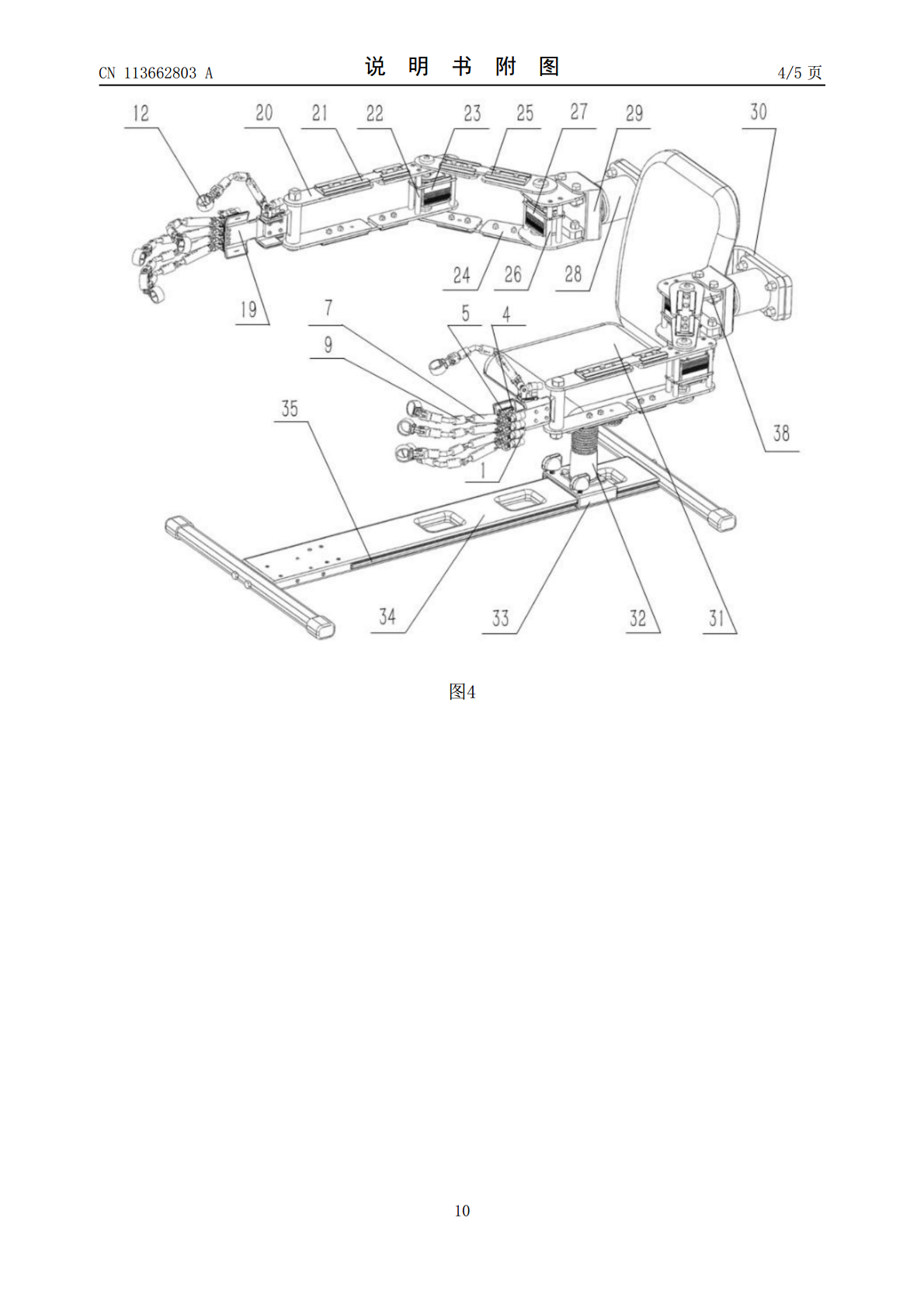
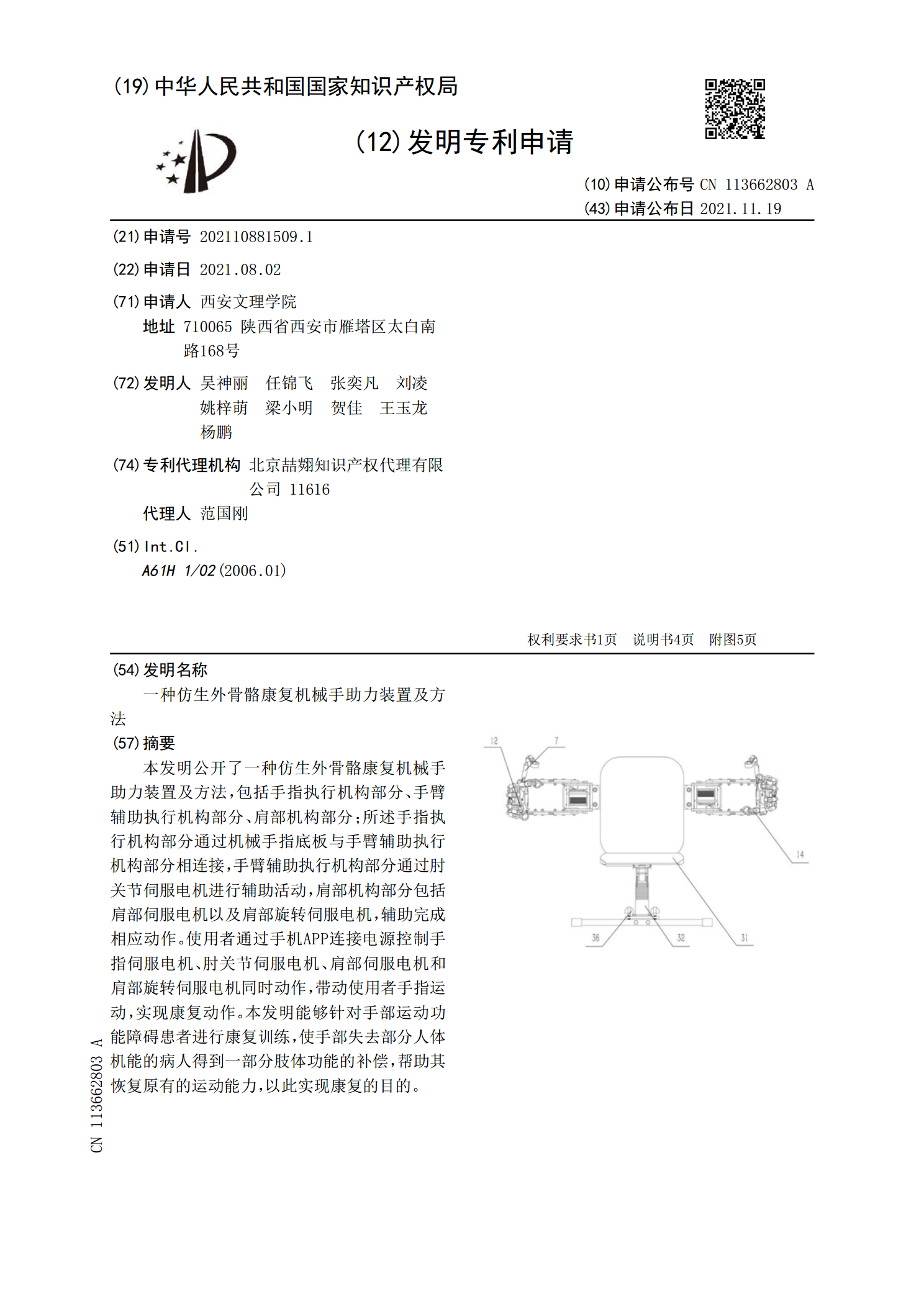
本发明公开了一种仿生外骨骼康复机械手助力装置及方法,包括手指执行机构部分、手臂辅助执行机构部分、肩部机构部分;所述手指执行机构部分通过机械手指底板与手臂辅助执行机构部分相连接,手臂辅助执行机构部分通过肘关节伺服电机进行辅助活动,肩部机构部分包括肩部伺服电机以及肩部旋转伺服电机,辅助完成相应动作。使用者通过手机APP连接电源控制手指伺服电机、肘关节伺服电机、肩部伺服电机和肩部旋转伺服电机同时动作,带动使用者手指运动,实现康复动作。本发明能够针对手部运动功能障碍患者进行康复训练,使手部失去部分人体机能的病人得
一种背部仿生外骨骼助力装置.pdf
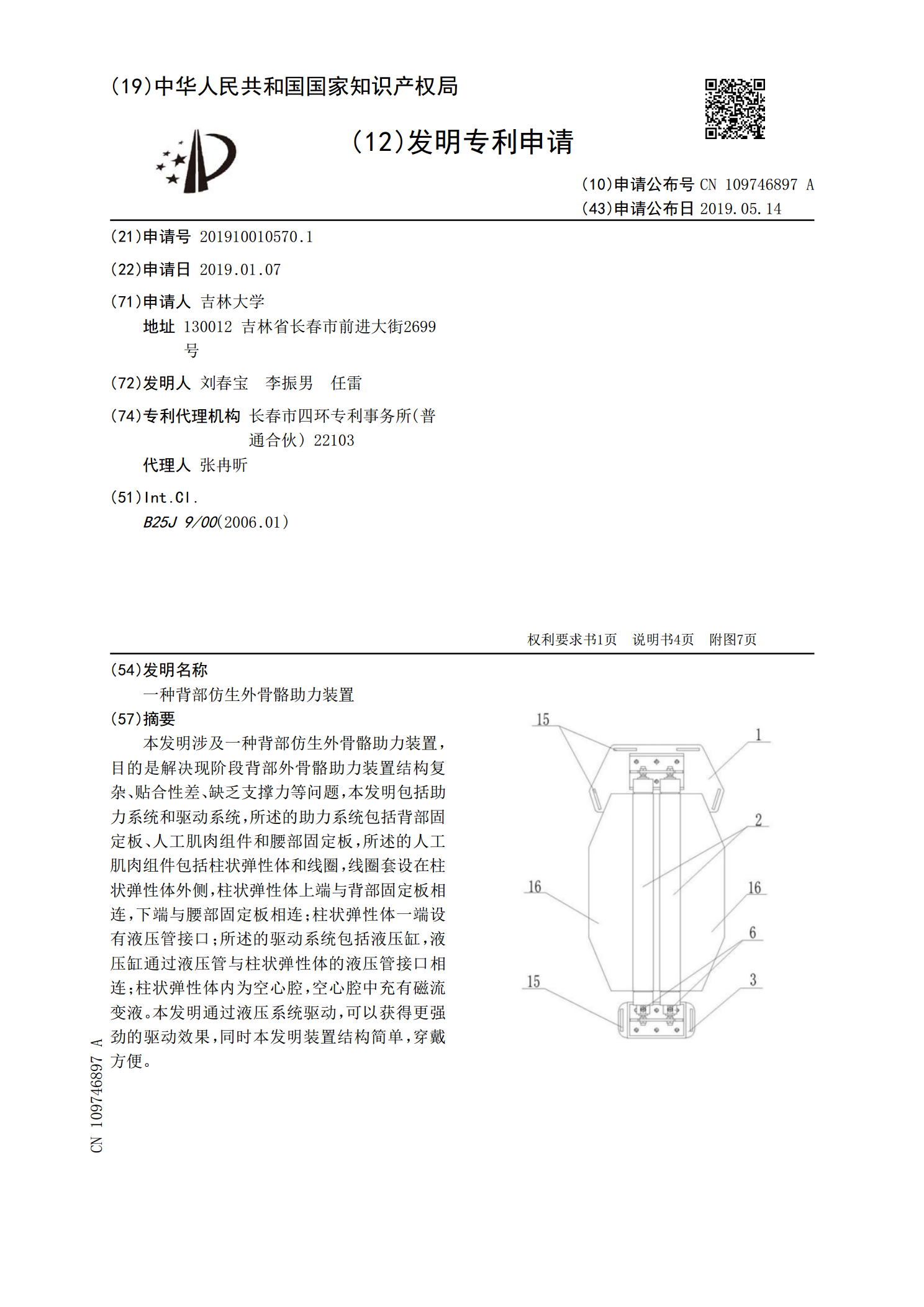
本发明涉及一种背部仿生外骨骼助力装置,目的是解决现阶段背部外骨骼助力装置结构复杂、贴合性差、缺乏支撑力等问题,本发明包括助力系统和驱动系统,所述的助力系统包括背部固定板、人工肌肉组件和腰部固定板,所述的人工肌肉组件包括柱状弹性体和线圈,线圈套设在柱状弹性体外侧,柱状弹性体上端与背部固定板相连,下端与腰部固定板相连;柱状弹性体一端设有液压管接口;所述的驱动系统包括液压缸,液压缸通过液压管与柱状弹性体的液压管接口相连;柱状弹性体内为空心腔,空心腔中充有磁流变液。本发明通过液压系统驱动,可以获得更强劲的驱动效果

外骨骼助力康复装置.pdf
本发明公开一种外骨骼助力康复装置的驱动结构的设计,包含:直流电机,一对锥齿轮,直齿轮,内齿条,传动轴,固定板。所述的一对锥齿轮用于改变动力传输的方向;所述的直齿轮和一个锥齿轮组成同轴传动装置;所述的直齿轮和内齿条相互啮合;所述的内齿条的一端和外侧关节下端零件相固定;与现有技术相比,本发明电机采用竖直放置,减小了以往对电机体积的要求;另外本发明机械结构简单,控制精度高,传动力矩大,安全性高。
一种刚柔耦合仿生外骨骼膝关节助力装置.pdf
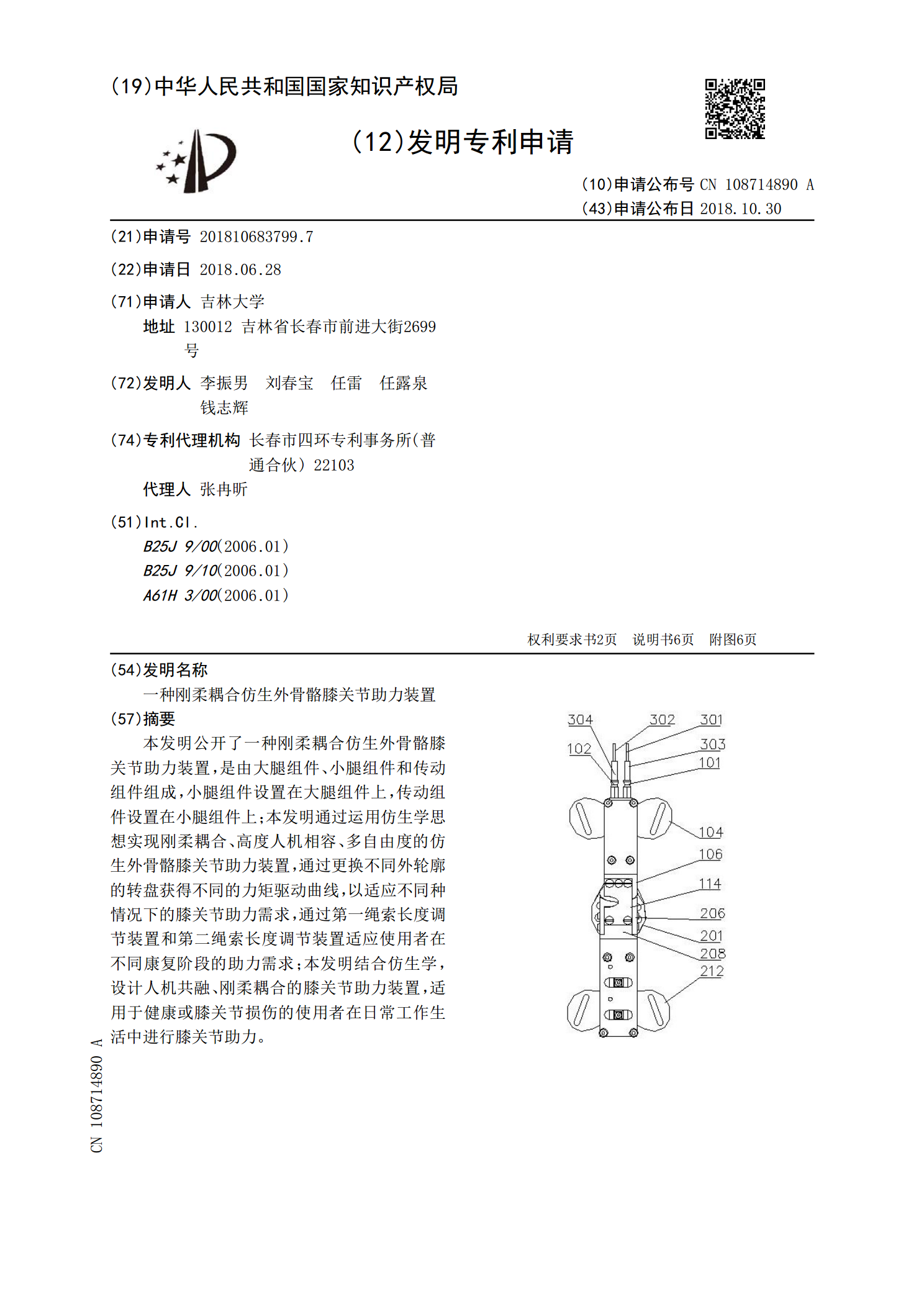
本发明公开了一种刚柔耦合仿生外骨骼膝关节助力装置,是由大腿组件、小腿组件和传动组件组成,小腿组件设置在大腿组件上,传动组件设置在小腿组件上;本发明通过运用仿生学思想实现刚柔耦合、高度人机相容、多自由度的仿生外骨骼膝关节助力装置,通过更换不同外轮廓的转盘获得不同的力矩驱动曲线,以适应不同种情况下的膝关节助力需求,通过第一绳索长度调节装置和第二绳索长度调节装置适应使用者在不同康复阶段的助力需求;本发明结合仿生学,设计人机共融、刚柔耦合的膝关节助力装置,适用于健康或膝关节损伤的使用者在日常工作生活中进行膝关节助

一种可穿戴仿生外骨骼机械腿康复装置的行走控制方法.pdf
本发明公开了一种可穿戴仿生外骨骼机械腿康复装置的行走控制方法。该方法包括第一步迈出左或右脚和持续行走控制,第一步迈出左或右脚是控制模块根据收到倾角传感器和脚底的压力传感器传来的数据,判断系统目前状态满足切换条件C1或C2,控制模块控制电机转动,带动大腿支架和小腿支架迈出左脚或右脚;持续行走控制包括控制模块根据倾角传感器和压力传感器传来的数据,判断系统目前状态满足切换条件C3或C5,以及满足状态切换条件C4或C6,或者不满足上述条件的处理。对于下肢重度瘫痪的用户,本发明能让用户重新用自己的双脚站起来,进行简