
一种铁路隧道衬砌检测系统.pdf

Ch****49

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种铁路隧道衬砌检测系统.pdf
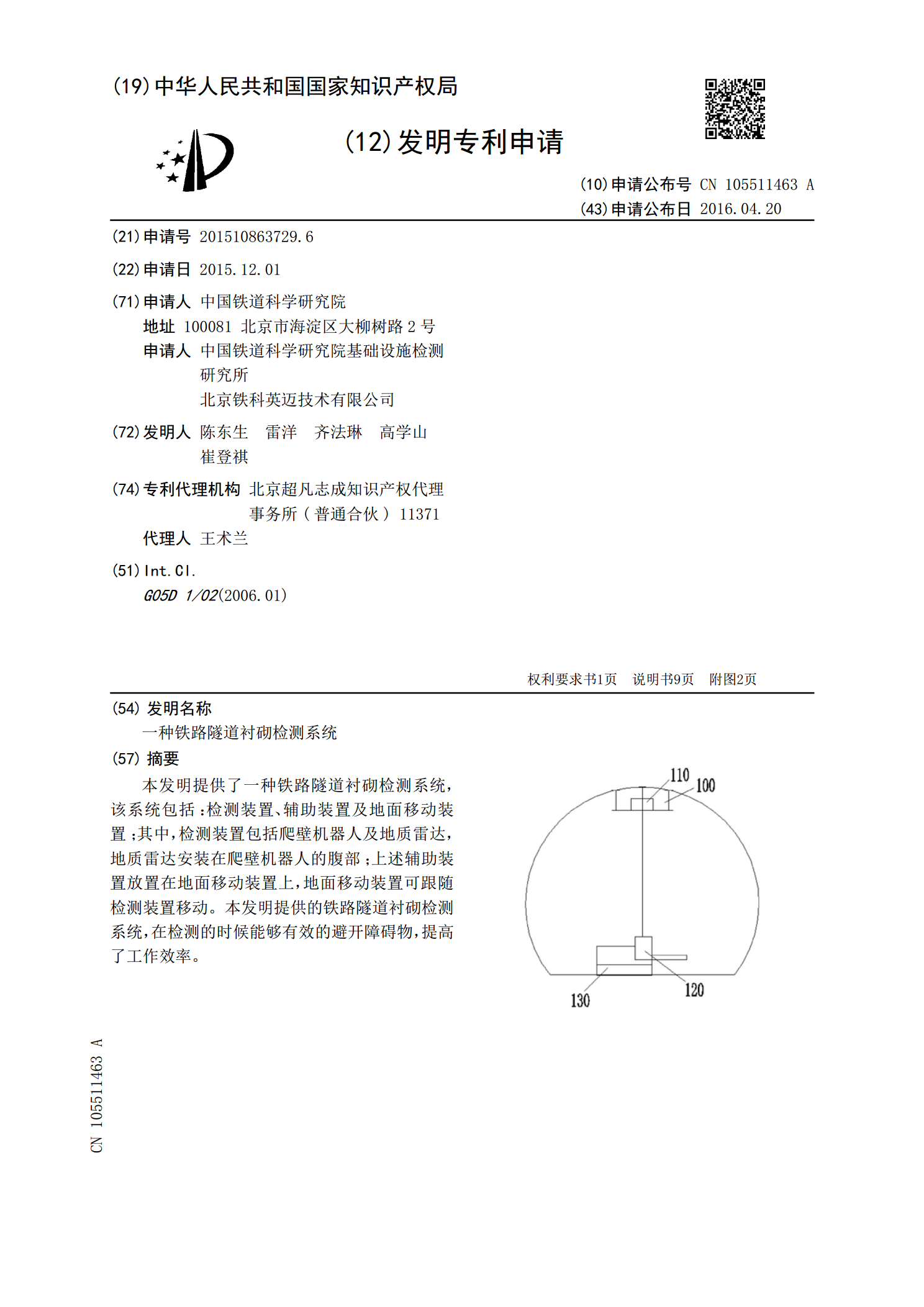
本发明提供了一种铁路隧道衬砌检测系统,该系统包括:检测装置、辅助装置及地面移动装置;其中,检测装置包括爬壁机器人及地质雷达,地质雷达安装在爬壁机器人的腹部;上述辅助装置放置在地面移动装置上,地面移动装置可跟随检测装置移动。本发明提供的铁路隧道衬砌检测系统,在检测的时候能够有效的避开障碍物,提高了工作效率。
铁路隧道衬砌表面病害快速检测系统.pdf
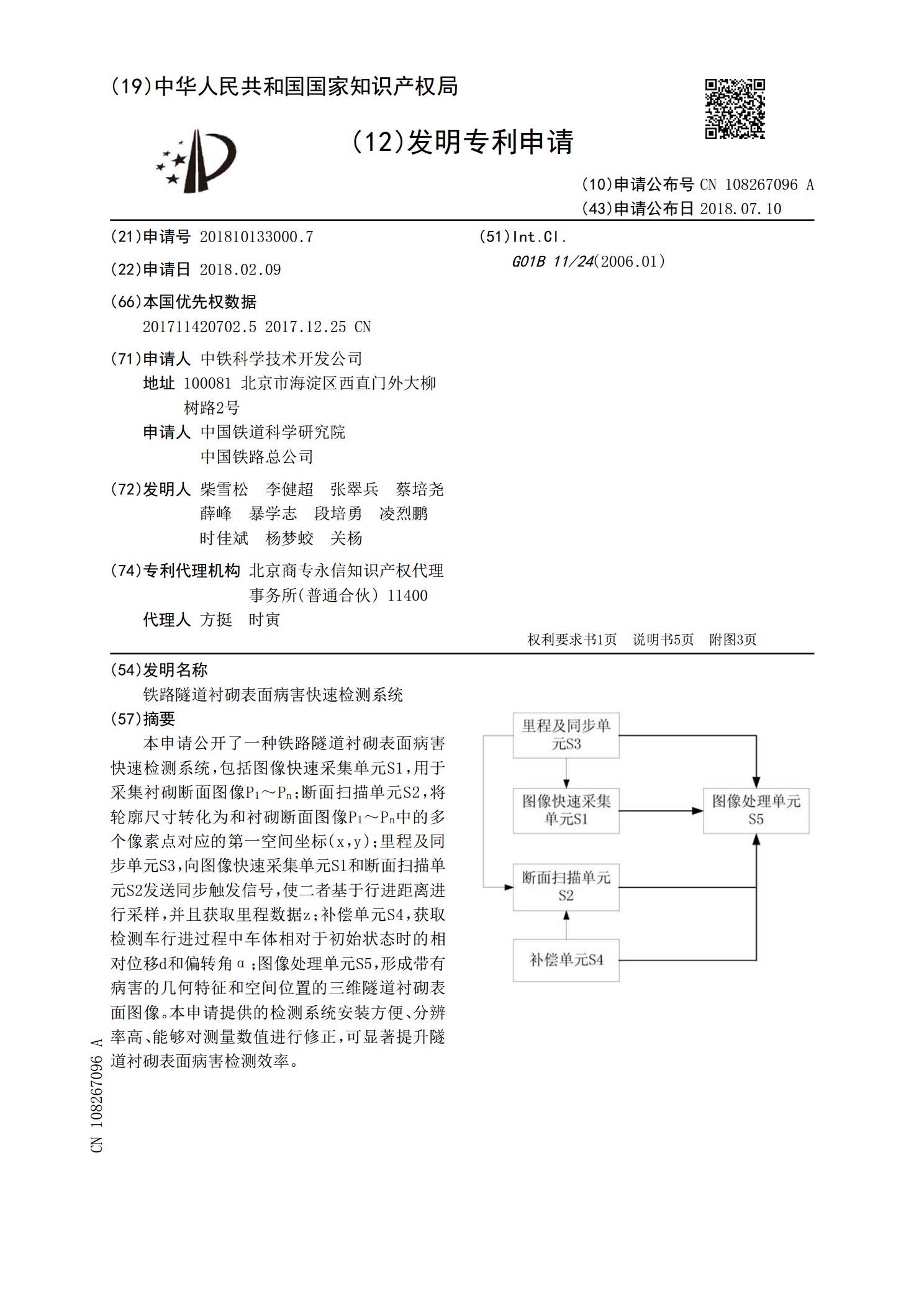
本申请公开了一种铁路隧道衬砌表面病害快速检测系统,包括图像快速采集单元S1,用于采集衬砌断面图像P<base:Sub>1</base:Sub>~P<base:Sub>n</base:Sub>;断面扫描单元S2,将轮廓尺寸转化为和衬砌断面图像P<base:Sub>1</base:Sub>~P<base:Sub>n</base:Sub>中的多个像素点对应的第一空间坐标(x,y);里程及同步单元S3,向图像快速采集单元S1和断面扫描单元S2发送同步触发信号,使二者基于行进距离进行采样,并且获取里程数据z;补偿单
一种隧道衬砌轮廓限界检测系统.pdf
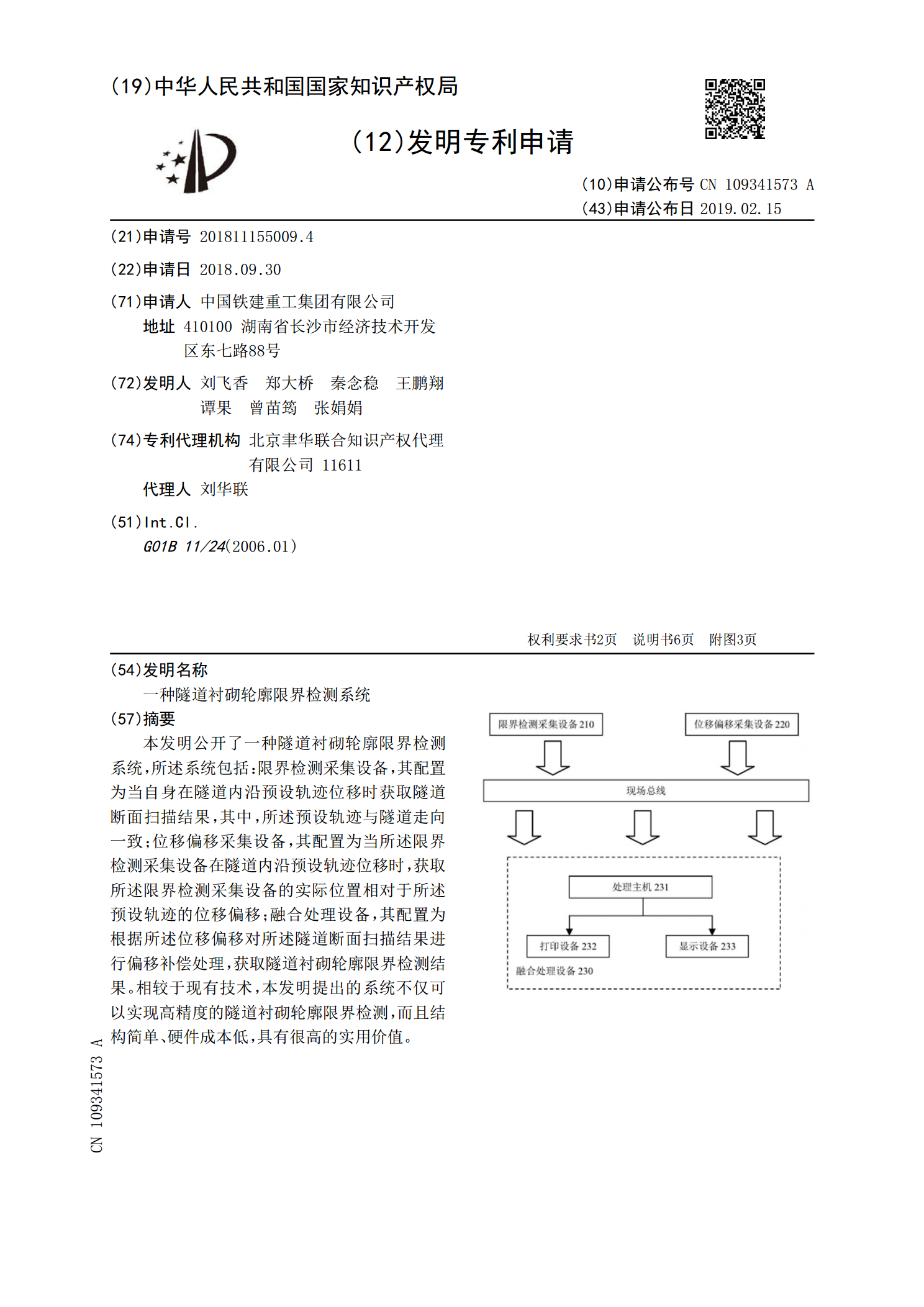
本发明公开了一种隧道衬砌轮廓限界检测系统,所述系统包括:限界检测采集设备,其配置为当自身在隧道内沿预设轨迹位移时获取隧道断面扫描结果,其中,所述预设轨迹与隧道走向一致;位移偏移采集设备,其配置为当所述限界检测采集设备在隧道内沿预设轨迹位移时,获取所述限界检测采集设备的实际位置相对于所述预设轨迹的位移偏移;融合处理设备,其配置为根据所述位移偏移对所述隧道断面扫描结果进行偏移补偿处理,获取隧道衬砌轮廓限界检测结果。相较于现有技术,本发明提出的系统不仅可以实现高精度的隧道衬砌轮廓限界检测,而且结构简单、硬件成本

铁路隧道衬砌状态检测数据管理系统的研究与实现.pptx
铁路隧道衬砌状态检测数据管理系统的研究与实现目录添加章节标题铁路隧道衬砌状态检测数据管理系统的研究背景铁路隧道衬砌状态检测的重要性现有数据管理系统的不足研究目的与意义铁路隧道衬砌状态检测数据管理系统的设计系统架构设计数据采集与处理模块设计数据存储与查询模块设计数据可视化模块设计铁路隧道衬砌状态检测数据管理系统的实现系统开发环境与工具数据采集与处理模块的实现数据存储与查询模块的实现数据可视化模块的实现铁路隧道衬砌状态检测数据管理系统的测试与验证测试环境与测试数据测试方法与测试过程测试结果与分析系统性能评估铁

浅谈新建铁路隧道衬砌质量检测技术.docx
浅谈新建铁路隧道衬砌质量检测技术隧道是现代铁路交通中不可或缺的重要设施之一。新建铁路隧道的衬砌质量检测是保障铁路交通安全的重要环节。本文将从隧道衬砌质量的检测重要性、现有衬砌质量检测技术的优缺点以及未来衬砌质量检测技术的发展趋势三个方面进行探讨。一、隧道衬砌质量检测的重要性隧道衬砌是铁路隧道中的重要构件,它承载着地质力学荷载和交通荷载,并且需要具有防水、防火、隔音、保温等功能。因此,衬砌的质量直接关系到铁路交通的安全和服务寿命。如果衬砌质量存在问题,容易引发管涌、渗漏、瓦斯积聚、塌方等隐患,危及列车和旅客