
一种隧道衬砌轮廓限界检测系统.pdf

一只****iu

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种隧道衬砌轮廓限界检测系统.pdf
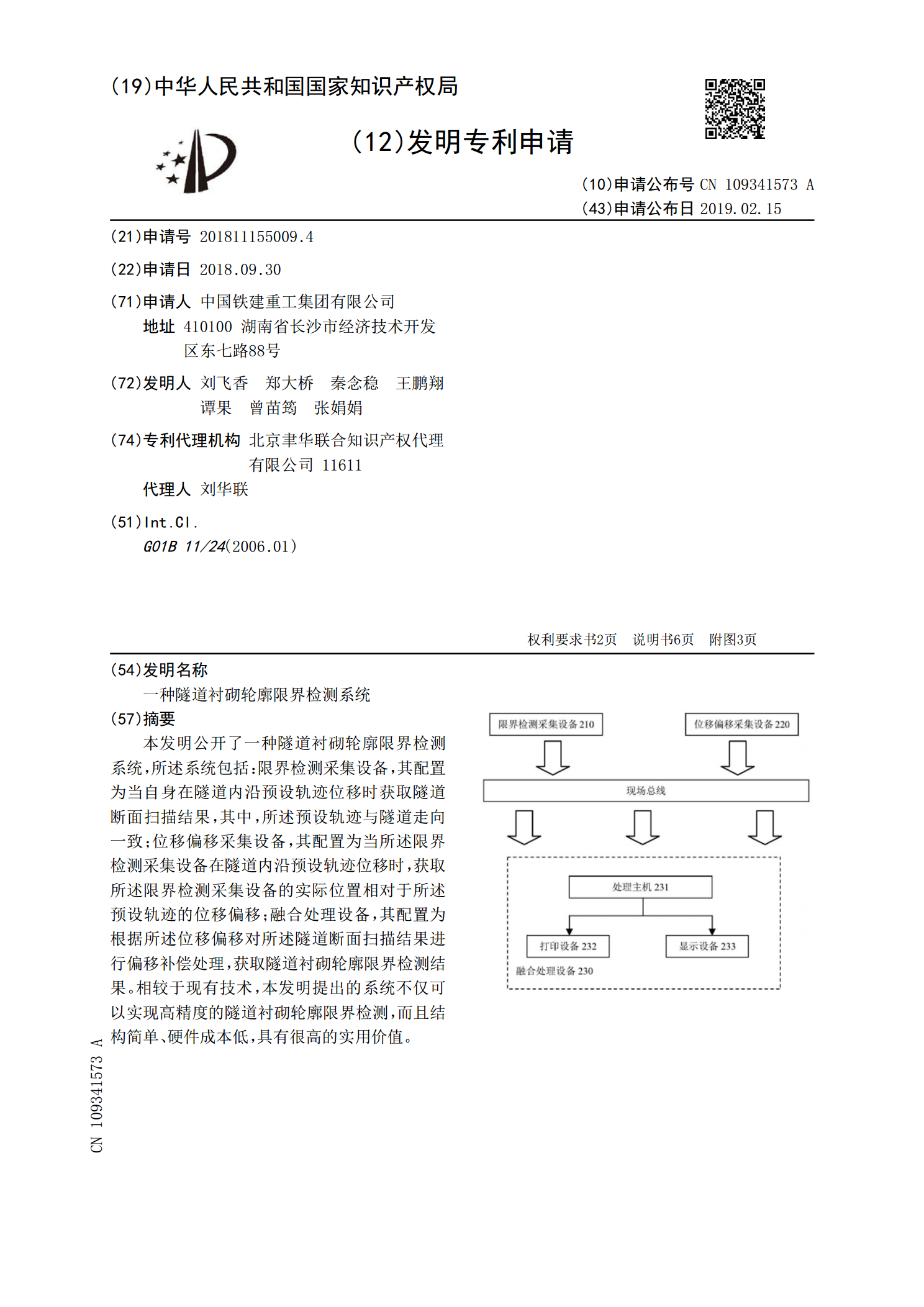
本发明公开了一种隧道衬砌轮廓限界检测系统,所述系统包括:限界检测采集设备,其配置为当自身在隧道内沿预设轨迹位移时获取隧道断面扫描结果,其中,所述预设轨迹与隧道走向一致;位移偏移采集设备,其配置为当所述限界检测采集设备在隧道内沿预设轨迹位移时,获取所述限界检测采集设备的实际位置相对于所述预设轨迹的位移偏移;融合处理设备,其配置为根据所述位移偏移对所述隧道断面扫描结果进行偏移补偿处理,获取隧道衬砌轮廓限界检测结果。相较于现有技术,本发明提出的系统不仅可以实现高精度的隧道衬砌轮廓限界检测,而且结构简单、硬件成本
桥隧养护与维修 82 隧道衬砌限界检测.pdf
隧道衬砌限界检测1.教学目标1.1知识目标:熟悉隧道衬砌限界检测内容掌握隧道衬砌限界检测方法1.2能力目标:具备进行基本隧道衬砌限界检测的能力2.重点编制实施性隧道衬砌限界检测方案3.难点隧道衬砌限界检测方法4.教学方法采用案例教学、头脑风暴、分组讨论等5.教具准备隧道衬砌限界检测图片、视频、多媒体课件6.教学内容6.1教学组织:1.通过图片介绍隧道衬砌限界检测;2.利用图纸、图片认识隧道衬砌限界检测;3.学生自学教材内容,讨论隧道衬砌限界检测内容;4.学生针对具体案例给出隧道衬砌限界检测方案。6.2教学

自动化轮廓限界检测系统.pdf
本发明提供了一种自动化轮廓限界检测系统,其包括:轨道车;显示输出模块,设置于所述轨道车内;PLC控制模块,设置于所述轨道车内,与所述显示输出模块通讯连接;障碍点检测装置,固定在所述轨道车外部,与所述PLC控制模块相连;里程测量装置,固定在所述轨道车的车轮上,与所述PLC控制模块通讯连接。本发明所述的自动化轮廓限界检测系统整体结构简单,承载能力高,适用性强,投入低,通过自动化系统实现检测区间隧道及车站框的障碍点检测,不需操作人员停车人工标记,省时、省力,在大大减少劳动力同时,大幅度提高了检测效率,整体效益显
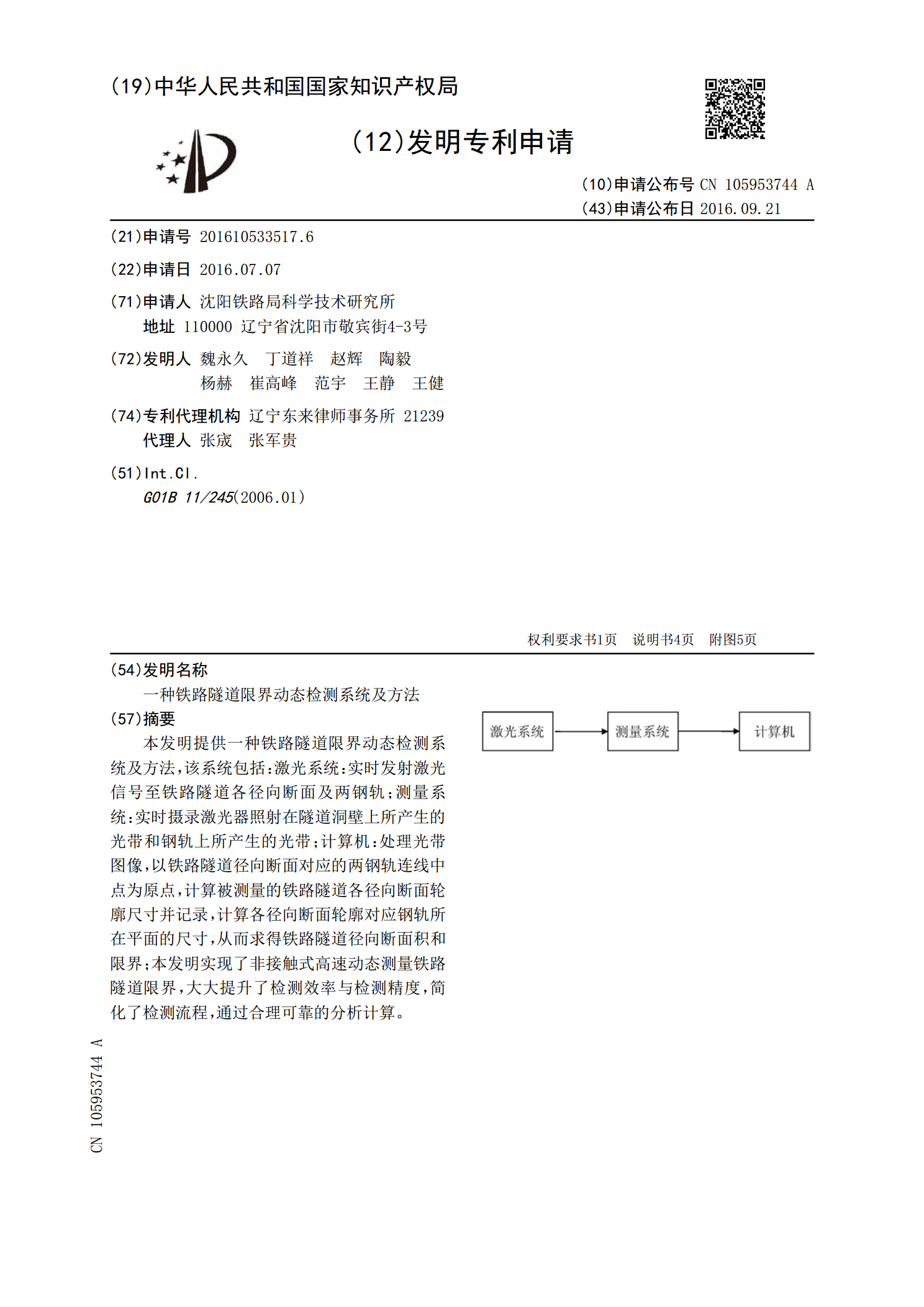
一种铁路隧道限界动态检测系统及方法.pdf
本发明提供一种铁路隧道限界动态检测系统及方法,该系统包括:激光系统:实时发射激光信号至铁路隧道各径向断面及两钢轨;测量系统:实时摄录激光器照射在隧道洞壁上所产生的光带和钢轨上所产生的光带;计算机:处理光带图像,以铁路隧道径向断面对应的两钢轨连线中点为原点,计算被测量的铁路隧道各径向断面轮廓尺寸并记录,计算各径向断面轮廓对应钢轨所在平面的尺寸,从而求得铁路隧道径向断面积和限界;本发明实现了非接触式高速动态测量铁路隧道限界,大大提升了检测效率与检测精度,简化了检测流程,通过合理可靠的分析计算。
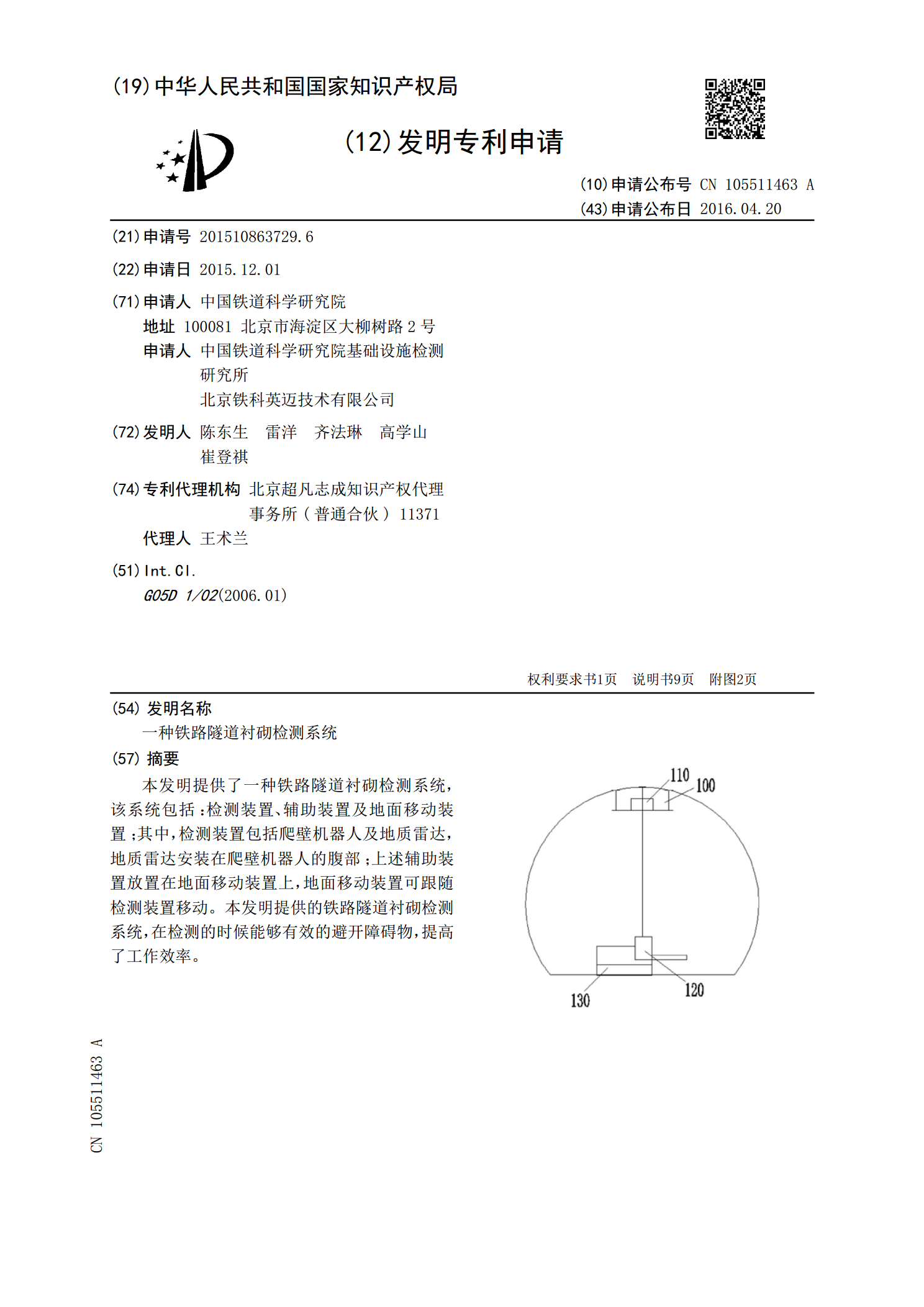
一种铁路隧道衬砌检测系统.pdf
本发明提供了一种铁路隧道衬砌检测系统,该系统包括:检测装置、辅助装置及地面移动装置;其中,检测装置包括爬壁机器人及地质雷达,地质雷达安装在爬壁机器人的腹部;上述辅助装置放置在地面移动装置上,地面移动装置可跟随检测装置移动。本发明提供的铁路隧道衬砌检测系统,在检测的时候能够有效的避开障碍物,提高了工作效率。