
一种监控摄像头内参标定方法、装置和电子设备.pdf

一吃****春晓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种监控摄像头内参标定方法、装置和电子设备.pdf
本发明提供了一种监控摄像头内参标定方法、装置和电子设备,所述监控摄像头内参标定方法包括:获取所述监控摄像头的拍摄图像和多个待选视角;根据所述待选视角和所述拍摄图像,确定内参初值;根据所述拍摄图像对所述内参初值和重投影误差进行优化,得到内参优化值和重投影误差优化值;遍历所述多个待选视角,对应的所述内参优化值和所述重投影误差优化值;根据多个所述待选视角对应的所述重投影误差优化值,确定所述监控摄像头的内参标定结果。这样,通过待选视角来计算内参初值,就不需要依靠平行线的消失点来计算,从而降低了检测和计算的人力成本

双目摄像头内参标定取图设备、方法及内参标定系统.pdf
本发明涉及车载摄像头参数调整的技术领域,尤其涉及双目摄像头内参标定取图设备、方法及内参标定系统。该设备包括上图卡板、前图卡板和操作装置;上图卡板、前图卡板分别设置在操作装置的上方、前方;操作装置包括移动机构、夹持转动机构和控制机构,控制机构分别与移动机构、夹持转动机构控制连接;夹持转动机构设置在移动机构上方,在移动机构带动下切换至上料位、广角取图位和窄角取图位;夹持转动机构包括底座、角度调节座和夹具。本发明提供双目摄像头产品的自动内参标定设备的机械设计,可以实现双目摄像头的自动标定,保证双目摄像头产品内参
一种基于外参已知的镜头内参标定方法及装置、电子设备.pdf
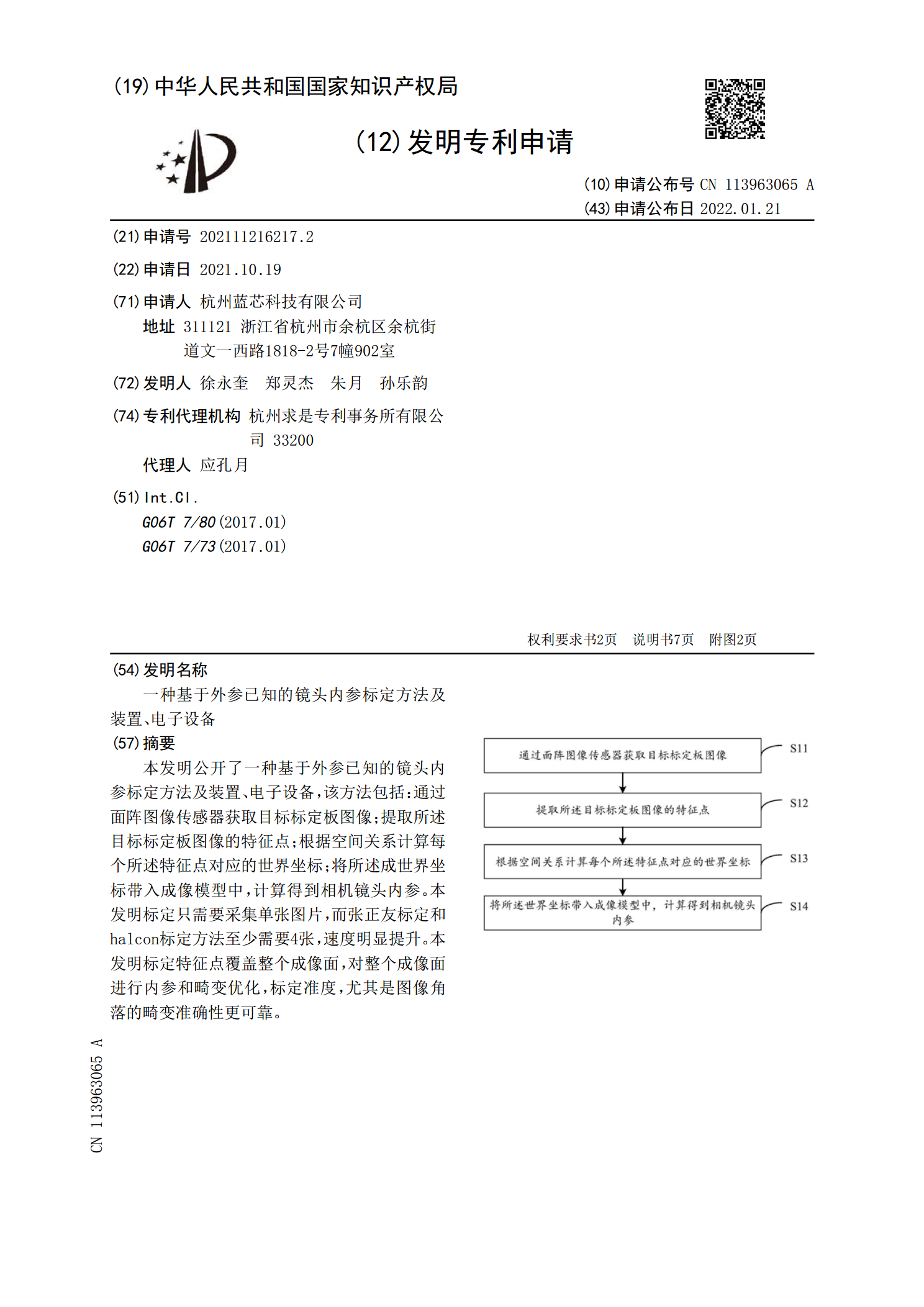
本发明公开了一种基于外参已知的镜头内参标定方法及装置、电子设备,该方法包括:通过面阵图像传感器获取目标标定板图像;提取所述目标标定板图像的特征点;根据空间关系计算每个所述特征点对应的世界坐标;将所述成世界坐标带入成像模型中,计算得到相机镜头内参。本发明标定只需要采集单张图片,而张正友标定和halcon标定方法至少需要4张,速度明显提升。本发明标定特征点覆盖整个成像面,对整个成像面进行内参和畸变优化,标定准度,尤其是图像角落的畸变准确性更可靠。

一种摄像头和车辆的外参数标定方法及装置、电子设备、存储介质.pdf
本发明提供一种摄像头和车辆的外参数标定方法及装置、电子设备、存储介质,其中一种摄像头和车辆的外参数标定方法包括:获取摄像头的内参,以及摄像头和车辆之间的初始外参数,并通过摄像头获取一段连续的原始图像;将原始图像处理得到车道线的像素坐标点,根据内参矩阵将各像素坐标点转化为摄像坐标系的摄像坐标点;根据初始外参将原始图像转为鸟瞰图像,提取鸟瞰图像上的车道线,将车道线转为在车辆坐标系中的三次曲线方程;建立各摄像坐标点与三次曲线方程的数据关联,计算出摄像头和车辆之间的目标外参。本方案中摄像头和车辆之间的目标外参计算

一种AVM摄像头参数标定方法、装置及电子设备.pdf
本发明公开了一种AVM摄像头参数标定方法、装置及电子设备,在目标空间内设计棋盘格并建立坐标系,并将待标定车辆停放在目标空间的指定位置;通过待标定车辆的各个摄像头采集棋盘格图像,并对棋盘格图像进行角点检测,得到相应的角点坐标集合;基于观察到角点坐标的摄像头数量,对角点坐标集合中的各个角点坐标进行分类,并根据角点坐标分类结果确定分类权重;对各个摄像头的内参和外参进行优化,并根据优化结果完成对摄像头的标定。本发明通过对摄像头采集图像中不同区域授予不同的权重,可以改善图象拼接效果,同时,通过计算对摄像头的内参和外