
一种基于激光雷达的点云数据生成方法.pdf

fu****级甜


1/7
2/7
3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于激光雷达的点云数据生成方法.pdf
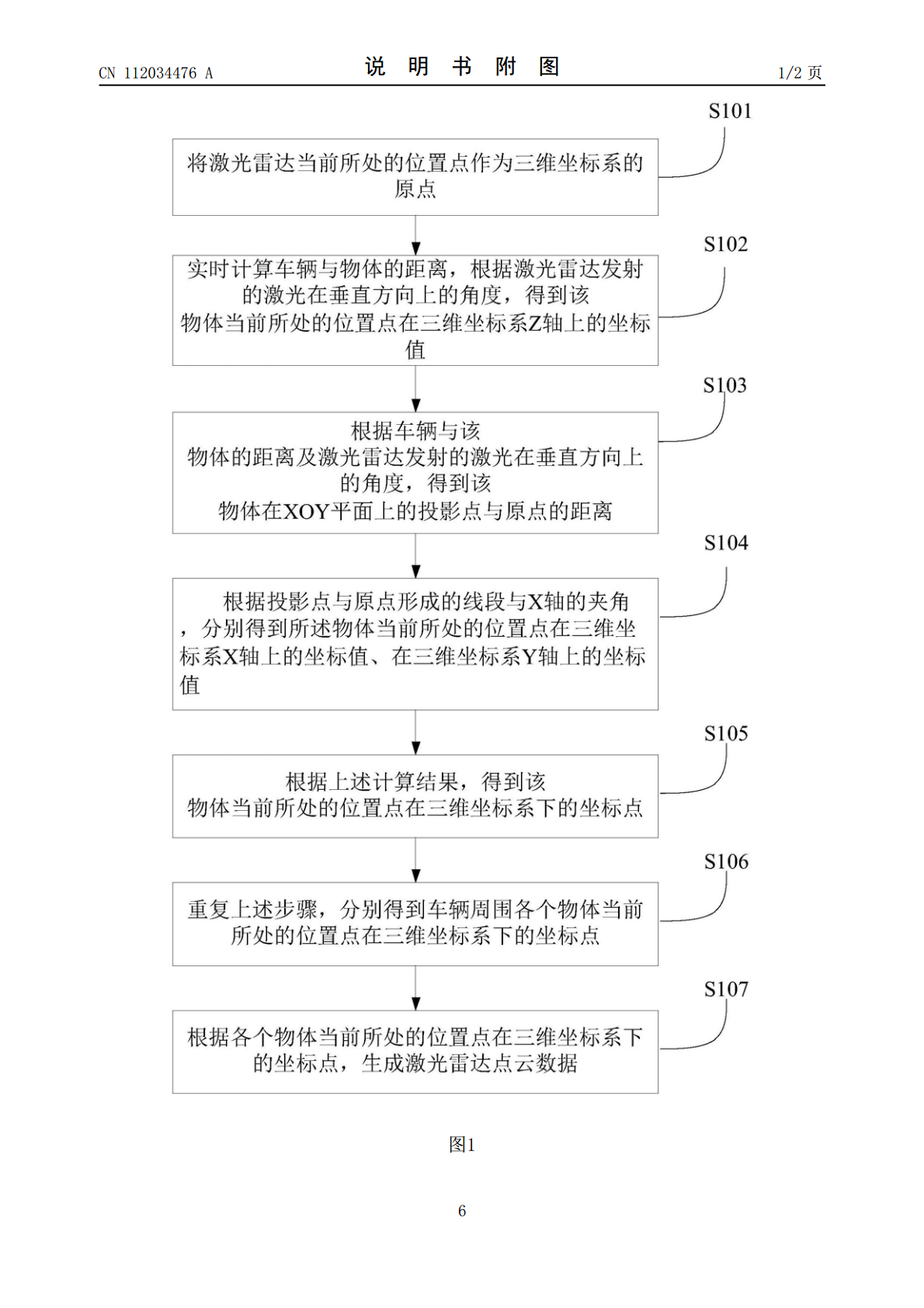
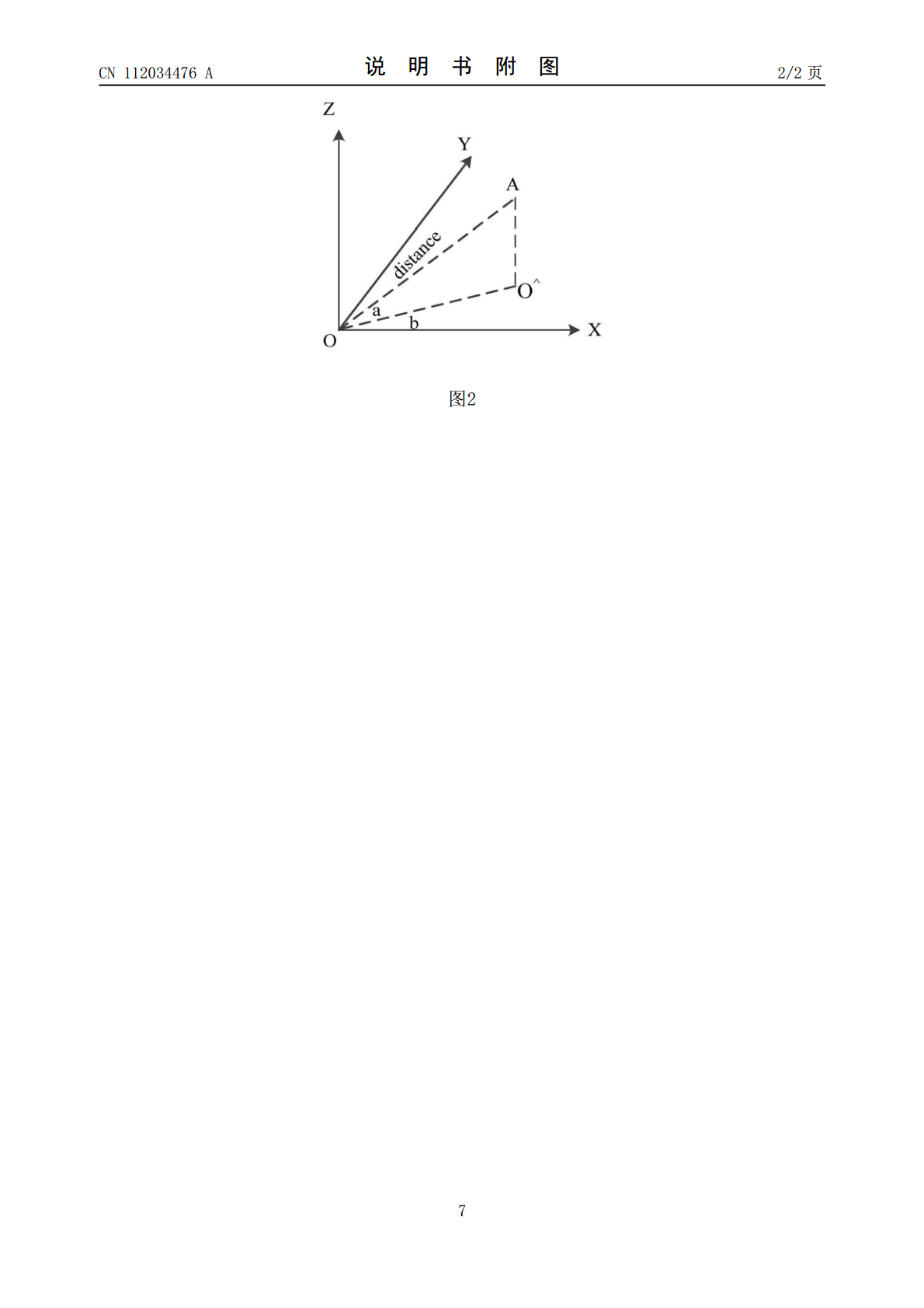
本发明公开的基于激光雷达的点云数据,涉及无人驾驶技术领域,通过将激光雷达当前所处的位置点作为三维坐标系的原点,利用安装于车辆上的激光雷达发射激光,实时计算车辆与物体的距离,根据激光雷达发射的激光在垂直方向上的角度,得到该物体当前所处的位置点在三维坐标系Z轴上的坐标值,根据投影点与原点形成的线段与X轴的夹角,分别得到该物体当前所处的位置点在三维坐标系X轴上的坐标值、在三维坐标系Y轴上的坐标值,得到该物体当前所处的位置点在三维坐标系下的坐标点,根据各个物体当前所处的位置点在三维坐标系下的坐标点,生成激光雷达点
激光雷达及生成激光点云数据的方法.pdf
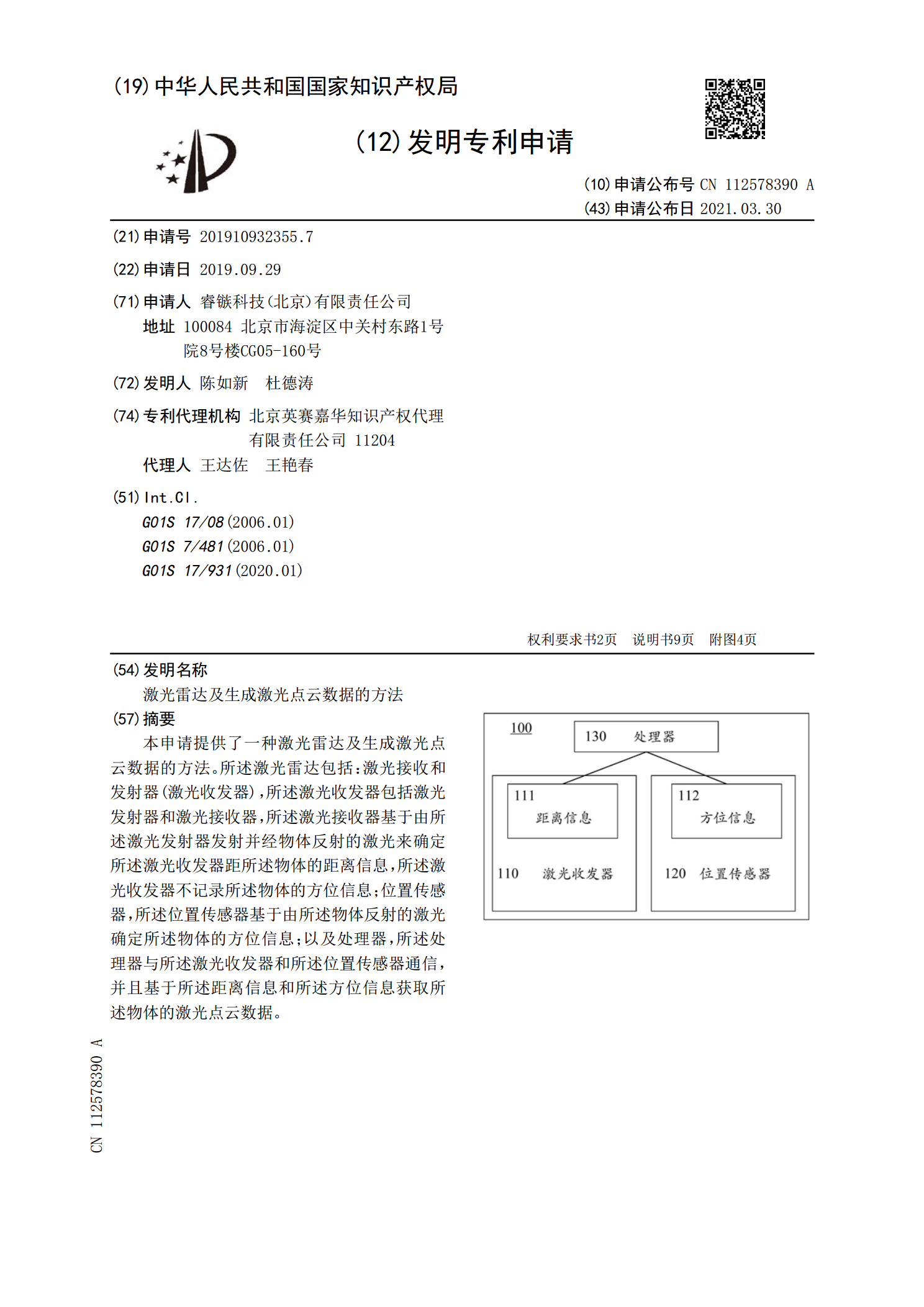
本申请提供了一种激光雷达及生成激光点云数据的方法。所述激光雷达包括:激光接收和发射器(激光收发器),所述激光收发器包括激光发射器和激光接收器,所述激光接收器基于由所述激光发射器发射并经物体反射的激光来确定所述激光收发器距所述物体的距离信息,所述激光收发器不记录所述物体的方位信息;位置传感器,所述位置传感器基于由所述物体反射的激光确定所述物体的方位信息;以及处理器,所述处理器与所述激光收发器和所述位置传感器通信,并且基于所述距离信息和所述方位信息获取所述物体的激光点云数据。

基于激光雷达点云数据生成等高线.docx
基于激光雷达点云数据生成等高线激光雷达是计算机视觉领域使用最广泛的传感器之一。由于其高分辨率和高精度,激光雷达广泛应用于地图制作、自动驾驶、建筑测量等领域。其中地图制作通常需要将激光雷达采集到的点云数据转换为地形图,以更直观的形式呈现地理信息。常见的地形图类型之一就是等高线图。因此,本文将探讨基于激光雷达点云数据生成等高线图的原理和方法。一、激光雷达点云数据的获取激光雷达点云数据是通过安装在飞机、无人机、车载或地面站等载体上的激光雷达设备实现的。激光雷达利用激光束扫描物体表面并记录每一次反射的时间、角度和

一种基于固态激光雷达点云生成深度图的方法.pdf
本发明公开了一种基于固态激光雷达点云生成深度图的方法,包括以下步骤:获取点云信息;生成粗糙深度图Range_Image和深度点集Range_Points;生成细化深度图Range_Image。上述技术方案根据距离视角中心的视角距离而非欧式距离来选择点,更符合几何意义,使得选取的点更精准,对于深度图丢失信息的坐标,综合考虑了该坐标竖直和水平方向上一定范围内点的强度和距离变化,使得利用周围信息补充该坐标信息的同时,最大可能保留边缘信息,使得生成的图像更加平滑和自然,以适配固态激光雷达,实现有效感知。
一种基于车辆数据的车载激光雷达点云地面提取方法.pdf
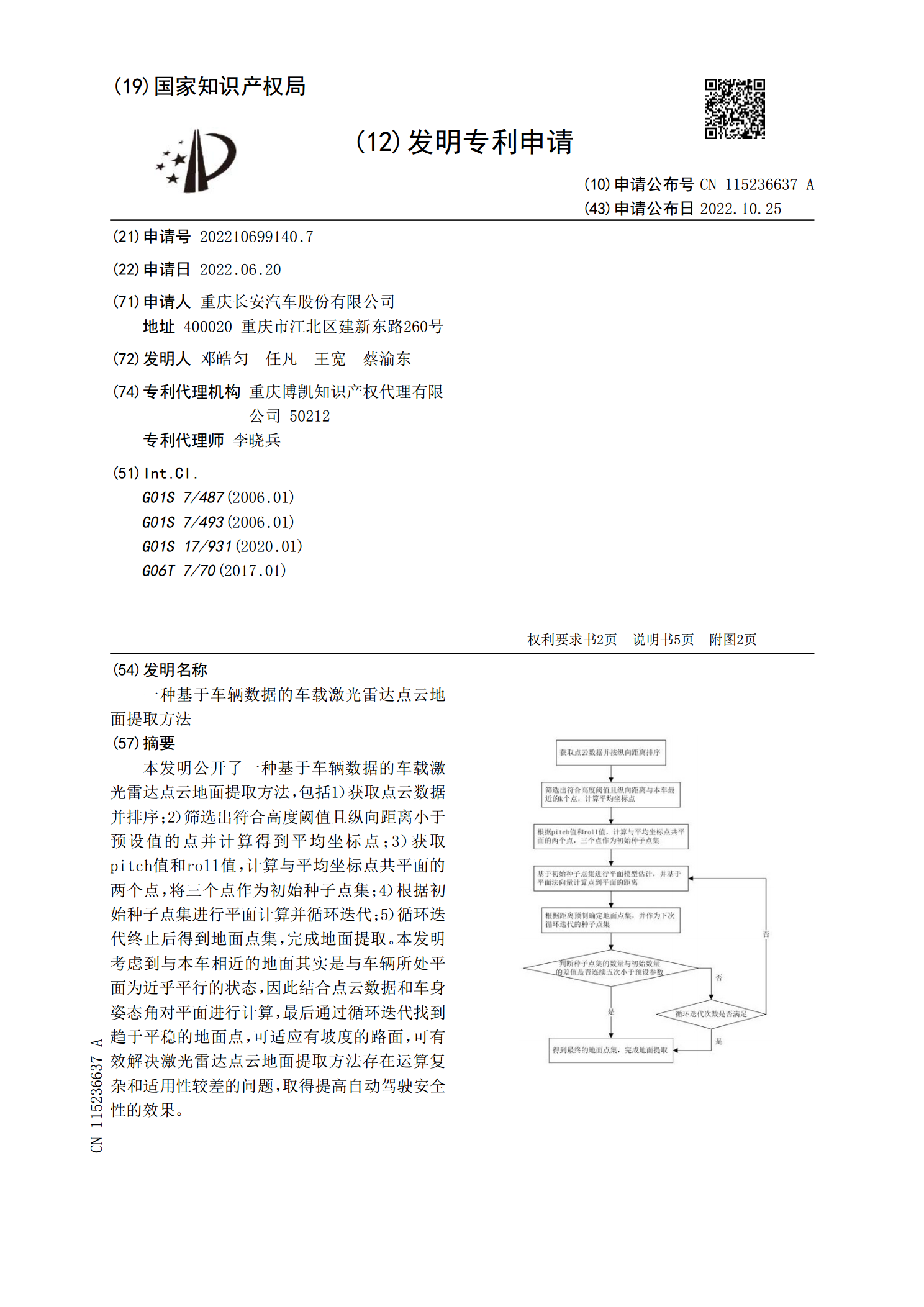
本发明公开了一种基于车辆数据的车载激光雷达点云地面提取方法,包括1)获取点云数据并排序;2)筛选出符合高度阈值且纵向距离小于预设值的点并计算得到平均坐标点;3)获取pitch值和roll值,计算与平均坐标点共平面的两个点,将三个点作为初始种子点集;4)根据初始种子点集进行平面计算并循环迭代;5)循环迭代终止后得到地面点集,完成地面提取。本发明考虑到与本车相近的地面其实是与车辆所处平面为近乎平行的状态,因此结合点云数据和车身姿态角对平面进行计算,最后通过循环迭代找到趋于平稳的地面点,可适应有坡度的路面,可有