
基于激光雷达点云数据生成等高线.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光雷达点云数据生成等高线.docx
基于激光雷达点云数据生成等高线激光雷达是计算机视觉领域使用最广泛的传感器之一。由于其高分辨率和高精度,激光雷达广泛应用于地图制作、自动驾驶、建筑测量等领域。其中地图制作通常需要将激光雷达采集到的点云数据转换为地形图,以更直观的形式呈现地理信息。常见的地形图类型之一就是等高线图。因此,本文将探讨基于激光雷达点云数据生成等高线图的原理和方法。一、激光雷达点云数据的获取激光雷达点云数据是通过安装在飞机、无人机、车载或地面站等载体上的激光雷达设备实现的。激光雷达利用激光束扫描物体表面并记录每一次反射的时间、角度和
激光雷达及生成激光点云数据的方法.pdf
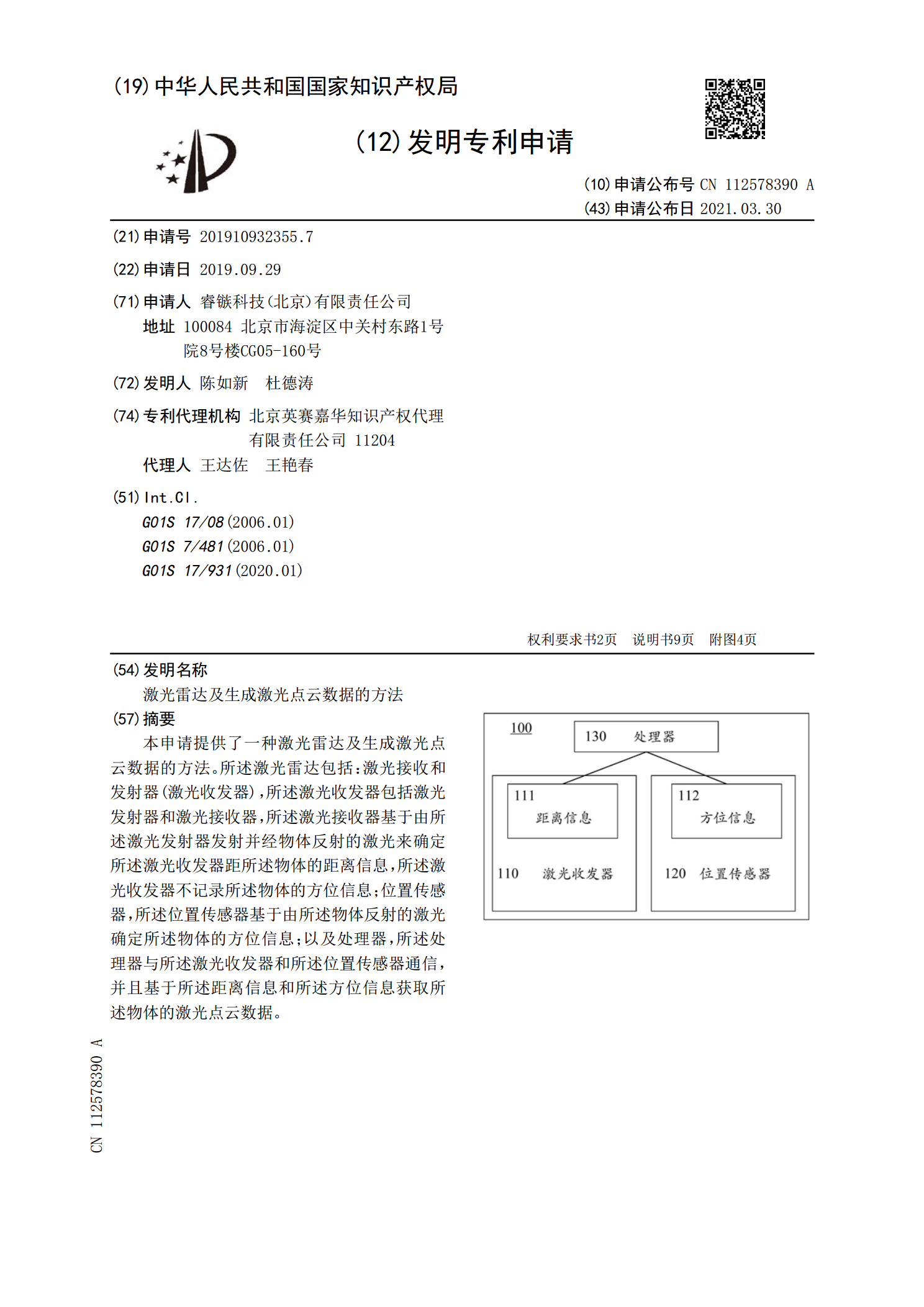
本申请提供了一种激光雷达及生成激光点云数据的方法。所述激光雷达包括:激光接收和发射器(激光收发器),所述激光收发器包括激光发射器和激光接收器,所述激光接收器基于由所述激光发射器发射并经物体反射的激光来确定所述激光收发器距所述物体的距离信息,所述激光收发器不记录所述物体的方位信息;位置传感器,所述位置传感器基于由所述物体反射的激光确定所述物体的方位信息;以及处理器,所述处理器与所述激光收发器和所述位置传感器通信,并且基于所述距离信息和所述方位信息获取所述物体的激光点云数据。

一种基于激光雷达的点云数据生成方法.pdf
本发明公开的基于激光雷达的点云数据,涉及无人驾驶技术领域,通过将激光雷达当前所处的位置点作为三维坐标系的原点,利用安装于车辆上的激光雷达发射激光,实时计算车辆与物体的距离,根据激光雷达发射的激光在垂直方向上的角度,得到该物体当前所处的位置点在三维坐标系Z轴上的坐标值,根据投影点与原点形成的线段与X轴的夹角,分别得到该物体当前所处的位置点在三维坐标系X轴上的坐标值、在三维坐标系Y轴上的坐标值,得到该物体当前所处的位置点在三维坐标系下的坐标点,根据各个物体当前所处的位置点在三维坐标系下的坐标点,生成激光雷达点

点云数据在cass中生成等高线的流程.docx
导出点云数据,保存为dxf格式用case打开点云数据修改当前图形比例尺,默认为1:0,改为1:500此时的点云数据只是point,其图层名默认为points,这个数据不能生成三角网,必须将其生成高程点数据文件如下图新建图形文件,然后展高程点高程点过滤,根据需要将高程点过滤建立DTM三角网处理过滤三角网绘制等高线删除三角网

基于激光雷达点云数据的树种分类.docx
基于激光雷达点云数据的树种分类基于激光雷达点云数据的树种分类摘要:近年来,激光雷达技术在地理信息系统和测绘领域的应用广泛,尤其在树种分类方面具有重要的研究价值和应用前景。本文研究基于激光雷达点云数据的树种分类方法,主要包括数据采集、特征提取和分类模型三个步骤。通过激光雷达获取的点云数据,利用点云数据中的高度、密度、三维形态等特征进行分析和提取,然后构建分类模型进行树种分类。实验结果表明,该方法能够有效地进行树种分类,为城市绿化管理和生态环境保护提供了有效的技术支持。关键词:激光雷达;点云数据;树种分类;特