
一种基于车辆数据的车载激光雷达点云地面提取方法.pdf

Ro****44

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于车辆数据的车载激光雷达点云地面提取方法.pdf
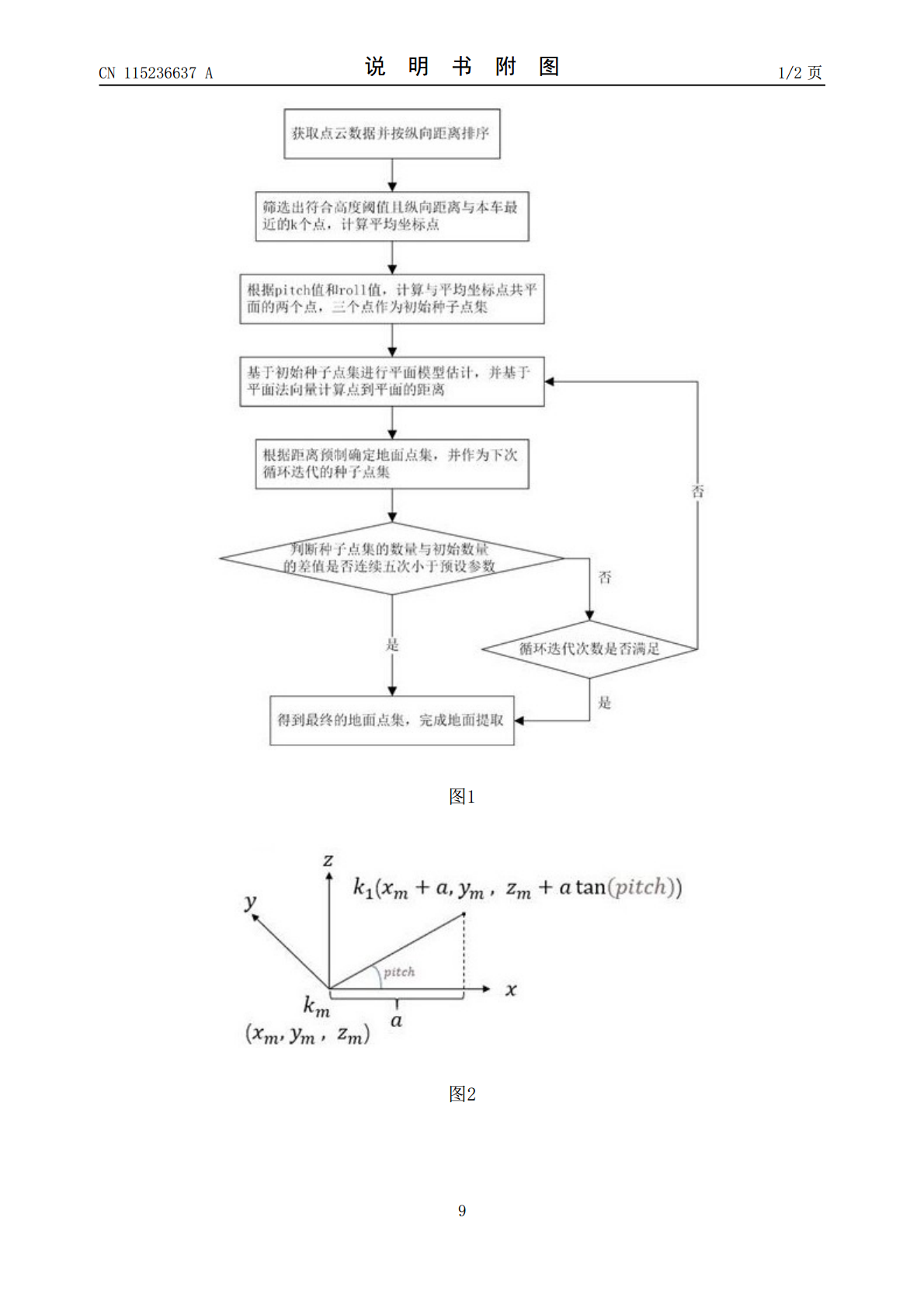
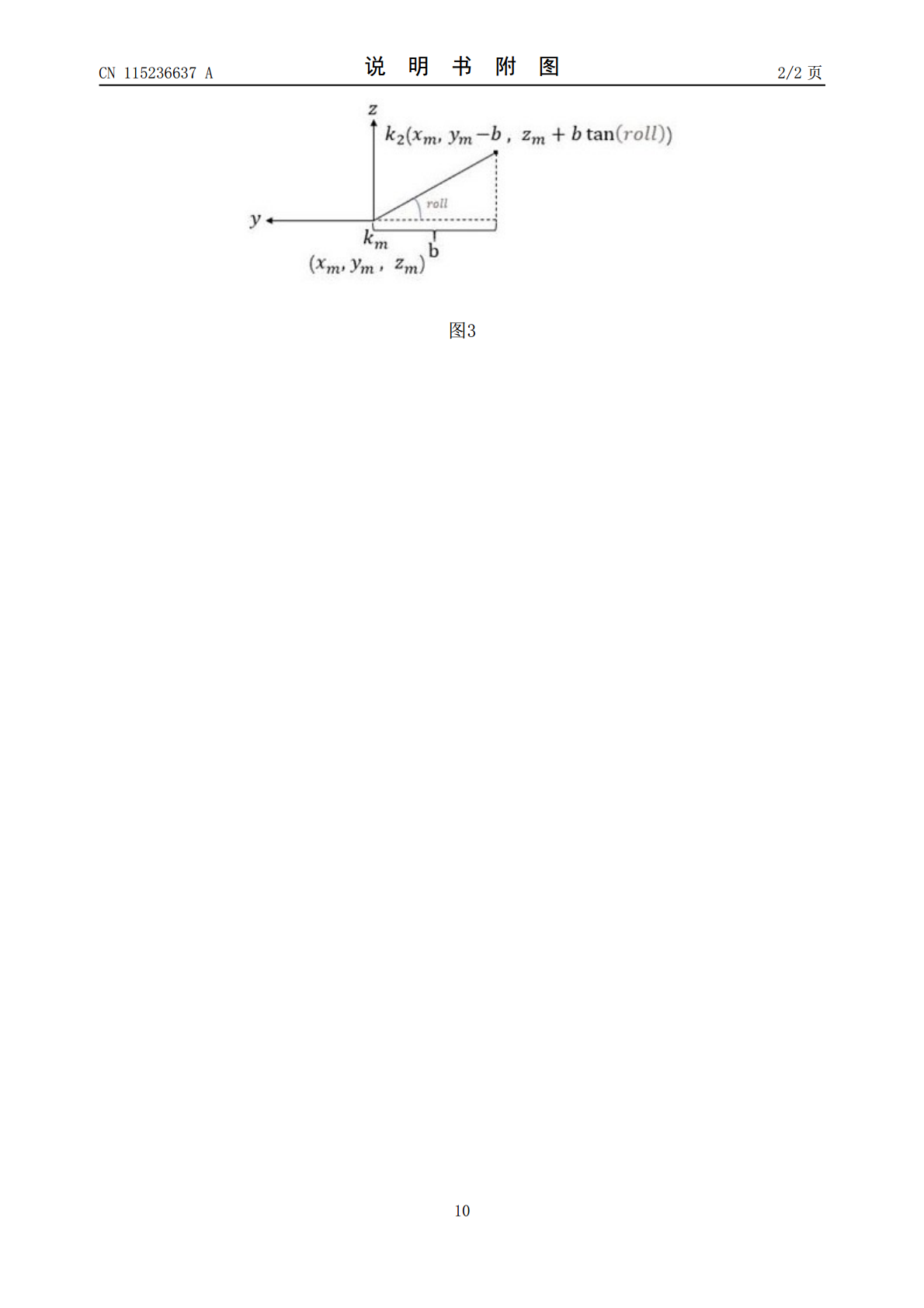
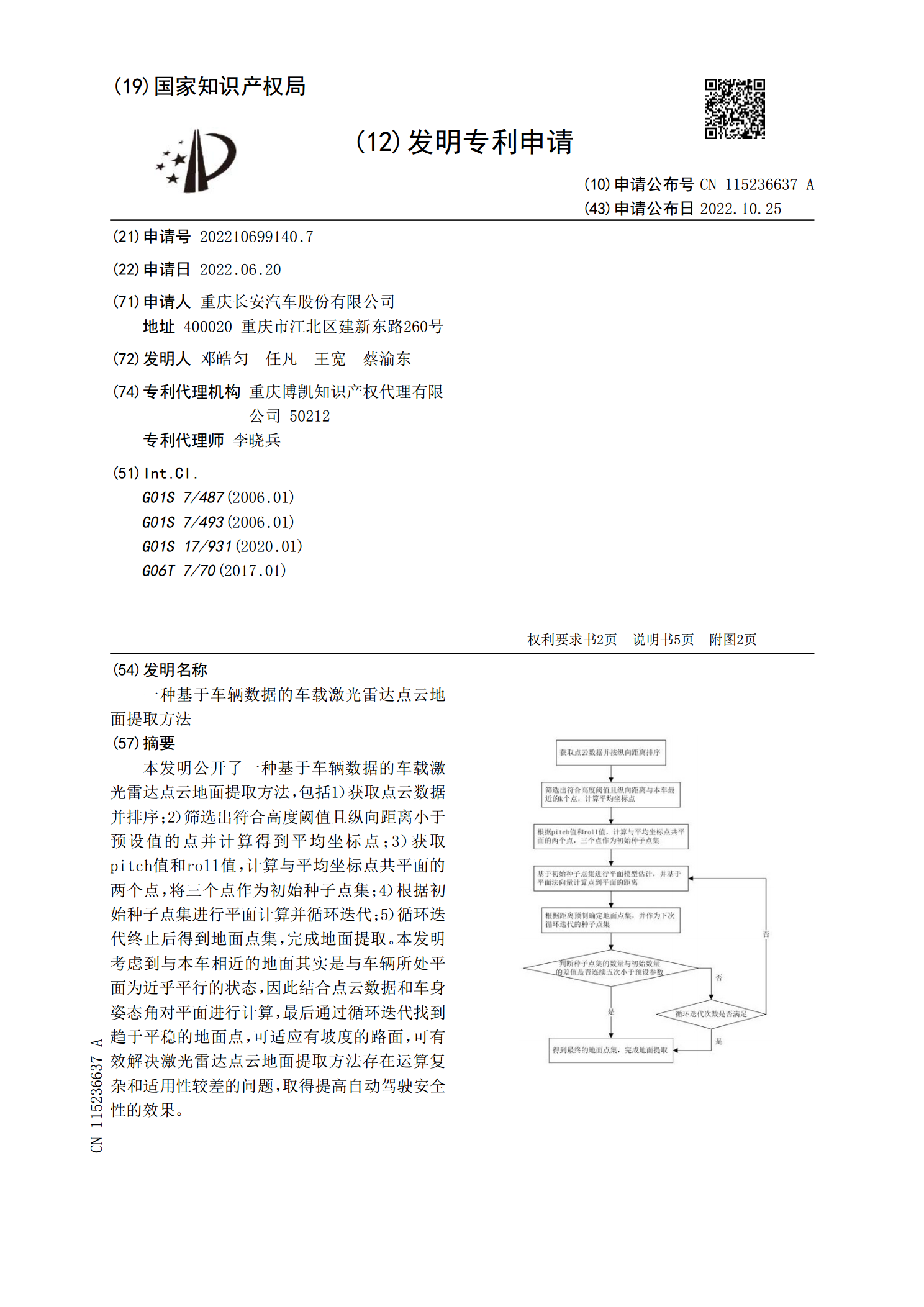
本发明公开了一种基于车辆数据的车载激光雷达点云地面提取方法,包括1)获取点云数据并排序;2)筛选出符合高度阈值且纵向距离小于预设值的点并计算得到平均坐标点;3)获取pitch值和roll值,计算与平均坐标点共平面的两个点,将三个点作为初始种子点集;4)根据初始种子点集进行平面计算并循环迭代;5)循环迭代终止后得到地面点集,完成地面提取。本发明考虑到与本车相近的地面其实是与车辆所处平面为近乎平行的状态,因此结合点云数据和车身姿态角对平面进行计算,最后通过循环迭代找到趋于平稳的地面点,可适应有坡度的路面,可有

基于地面激光雷达点云数据的树木胸径及树干形态提取方法研究.docx
基于地面激光雷达点云数据的树木胸径及树干形态提取方法研究摘要:随着激光雷达技术的发展,其在三维数据获取和处理领域中的应用越来越广泛。本论文研究了一种基于地面激光雷达点云数据的树木胸径及树干形态提取方法。通过分析地面激光雷达点云数据,结合相关算法和模型,实现了对树木胸径及树干形态的自动提取。实验结果表明,该方法能够准确地提取树木胸径及树干形态,并具有较高的精度和效率。关键词:激光雷达,点云数据,树木胸径,树干形态,提取方法1.引言激光雷达技术可以通过发射激光束并测量返回的反射信号,获取目标物体的三维坐标信息
一种车载点云地面点提取方法及存储介质.pdf
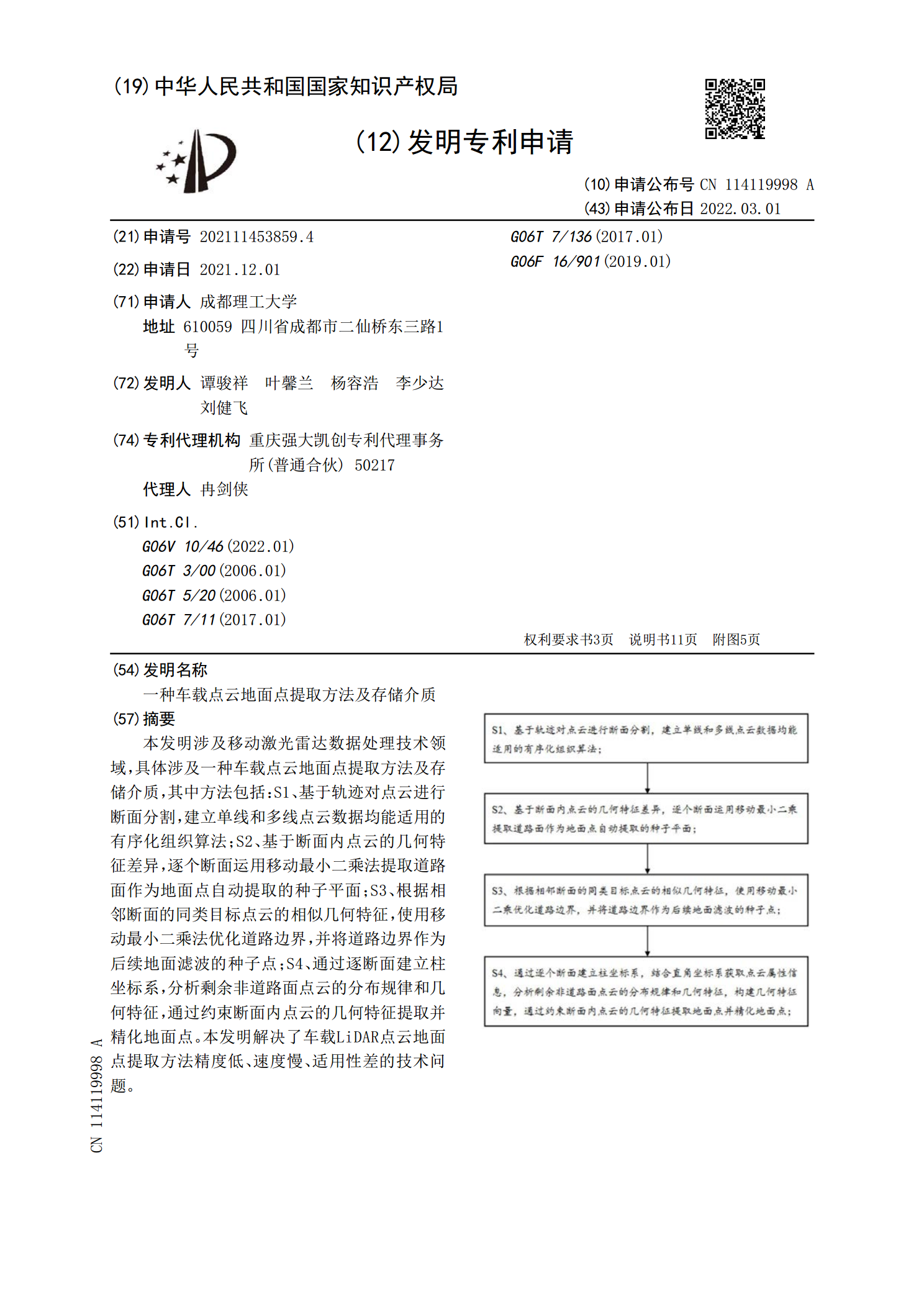
本发明涉及移动激光雷达数据处理技术领域,具体涉及一种车载点云地面点提取方法及存储介质,其中方法包括:S1、基于轨迹对点云进行断面分割,建立单线和多线点云数据均能适用的有序化组织算法;S2、基于断面内点云的几何特征差异,逐个断面运用移动最小二乘法提取道路面作为地面点自动提取的种子平面;S3、根据相邻断面的同类目标点云的相似几何特征,使用移动最小二乘法优化道路边界,并将道路边界作为后续地面滤波的种子点;S4、通过逐断面建立柱坐标系,分析剩余非道路面点云的分布规律和几何特征,通过约束断面内点云的几何特征提取并精

一种车载激光雷达点云信号地面点分离方法.pdf
本发明公开了一种车载激光雷达点云信号地面点分离方法,具体的步骤如下:S1:读取原始激光雷达点云信号;S2:根据时间戳把所述原始激光雷达点云信号分解为单帧点云信号;S3:利用激光雷达的水平分辨率针对单帧点云信号,计算垂直线数量;S4:针对每一条垂直线寻找其地面初始点和阈值点;S5:根据每条垂直线上的地面初始点和阈值点的选取将点云信号划分为地面点和非地面点,得到最终的分离结果。该方法在满足实时性要求的同时精度可以达到保障。且该方法基于数学模型而非数据驱动式模型,有良好的可验证性以及实用性,该算法处理用时较短,
基于地面激光雷达点云数据的林冠截留模型的构建方法.pdf
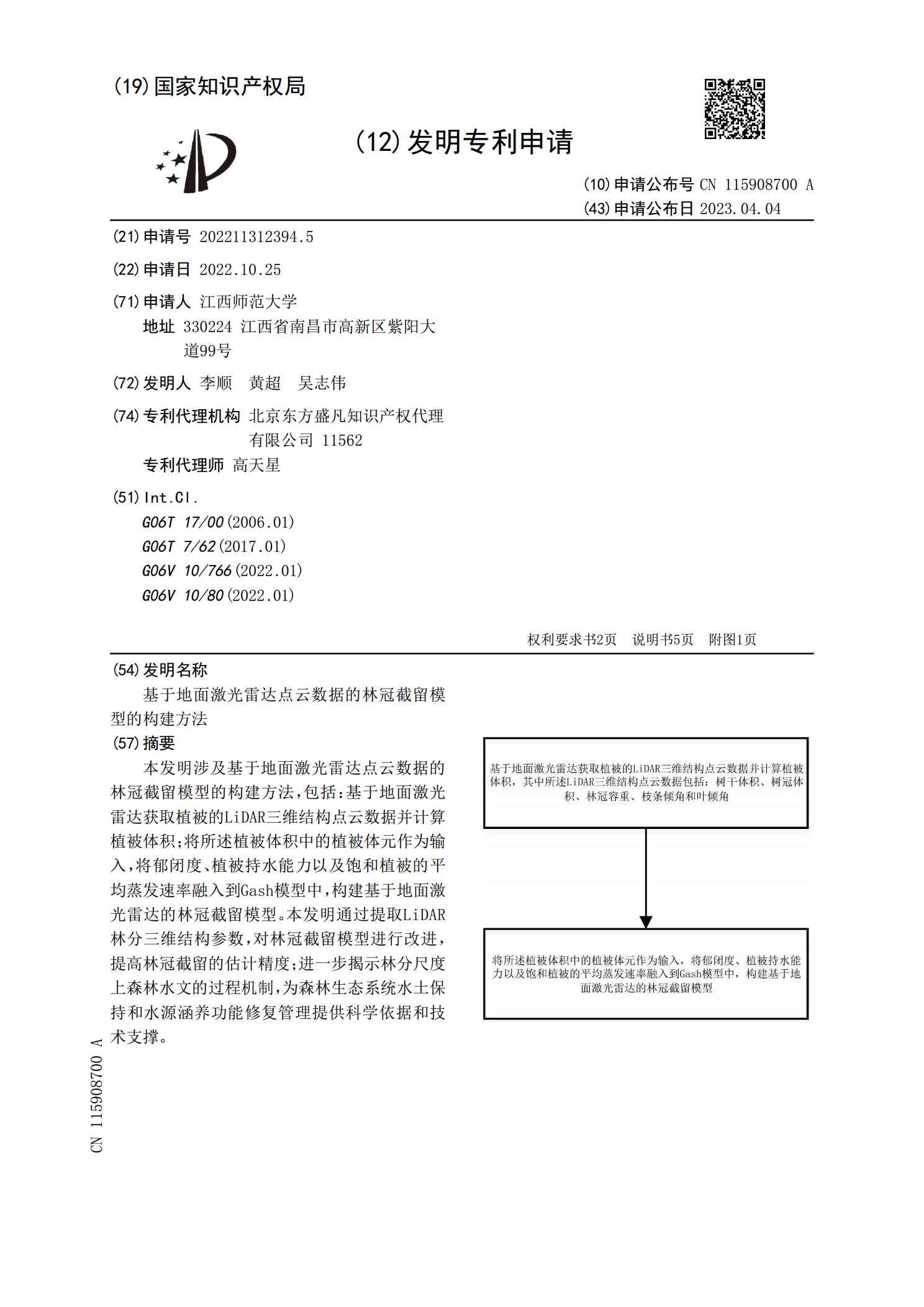
本发明涉及基于地面激光雷达点云数据的林冠截留模型的构建方法,包括:基于地面激光雷达获取植被的LiDAR三维结构点云数据并计算植被体积;将所述植被体积中的植被体元作为输入,将郁闭度、植被持水能力以及饱和植被的平均蒸发速率融入到Gash模型中,构建基于地面激光雷达的林冠截留模型。本发明通过提取LiDAR林分三维结构参数,对林冠截留模型进行改进,提高林冠截留的估计精度;进一步揭示林分尺度上森林水文的过程机制,为森林生态系统水土保持和水源涵养功能修复管理提供科学依据和技术支撑。