
激光雷达及生成激光点云数据的方法.pdf

骊英****bb


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光雷达及生成激光点云数据的方法.pdf
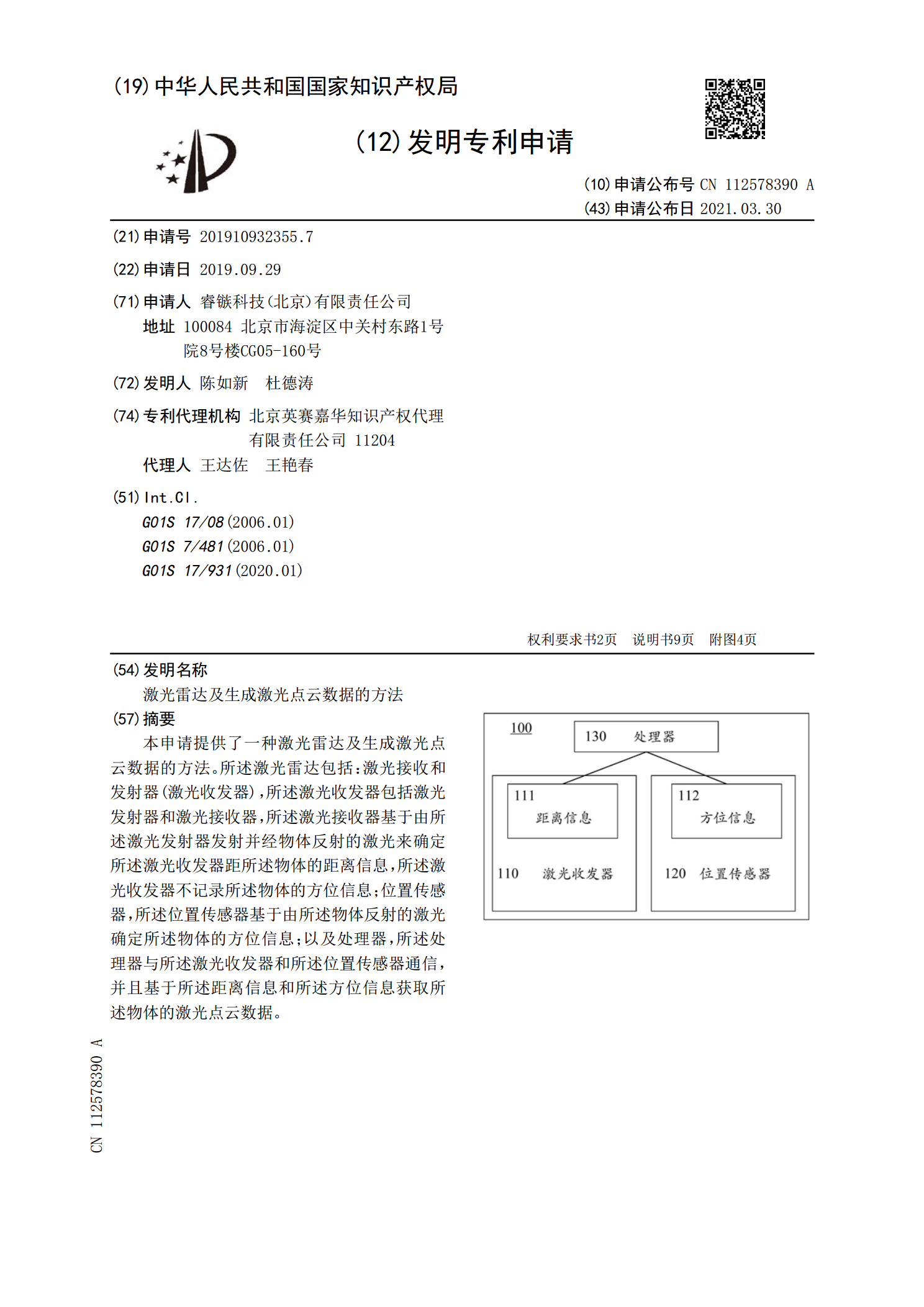
本申请提供了一种激光雷达及生成激光点云数据的方法。所述激光雷达包括:激光接收和发射器(激光收发器),所述激光收发器包括激光发射器和激光接收器,所述激光接收器基于由所述激光发射器发射并经物体反射的激光来确定所述激光收发器距所述物体的距离信息,所述激光收发器不记录所述物体的方位信息;位置传感器,所述位置传感器基于由所述物体反射的激光确定所述物体的方位信息;以及处理器,所述处理器与所述激光收发器和所述位置传感器通信,并且基于所述距离信息和所述方位信息获取所述物体的激光点云数据。

一种基于激光雷达的点云数据生成方法.pdf
本发明公开的基于激光雷达的点云数据,涉及无人驾驶技术领域,通过将激光雷达当前所处的位置点作为三维坐标系的原点,利用安装于车辆上的激光雷达发射激光,实时计算车辆与物体的距离,根据激光雷达发射的激光在垂直方向上的角度,得到该物体当前所处的位置点在三维坐标系Z轴上的坐标值,根据投影点与原点形成的线段与X轴的夹角,分别得到该物体当前所处的位置点在三维坐标系X轴上的坐标值、在三维坐标系Y轴上的坐标值,得到该物体当前所处的位置点在三维坐标系下的坐标点,根据各个物体当前所处的位置点在三维坐标系下的坐标点,生成激光雷达点

基于激光雷达点云数据生成等高线.docx
基于激光雷达点云数据生成等高线激光雷达是计算机视觉领域使用最广泛的传感器之一。由于其高分辨率和高精度,激光雷达广泛应用于地图制作、自动驾驶、建筑测量等领域。其中地图制作通常需要将激光雷达采集到的点云数据转换为地形图,以更直观的形式呈现地理信息。常见的地形图类型之一就是等高线图。因此,本文将探讨基于激光雷达点云数据生成等高线图的原理和方法。一、激光雷达点云数据的获取激光雷达点云数据是通过安装在飞机、无人机、车载或地面站等载体上的激光雷达设备实现的。激光雷达利用激光束扫描物体表面并记录每一次反射的时间、角度和
点云数据的处理方法、装置、存储介质及激光雷达系统.pdf
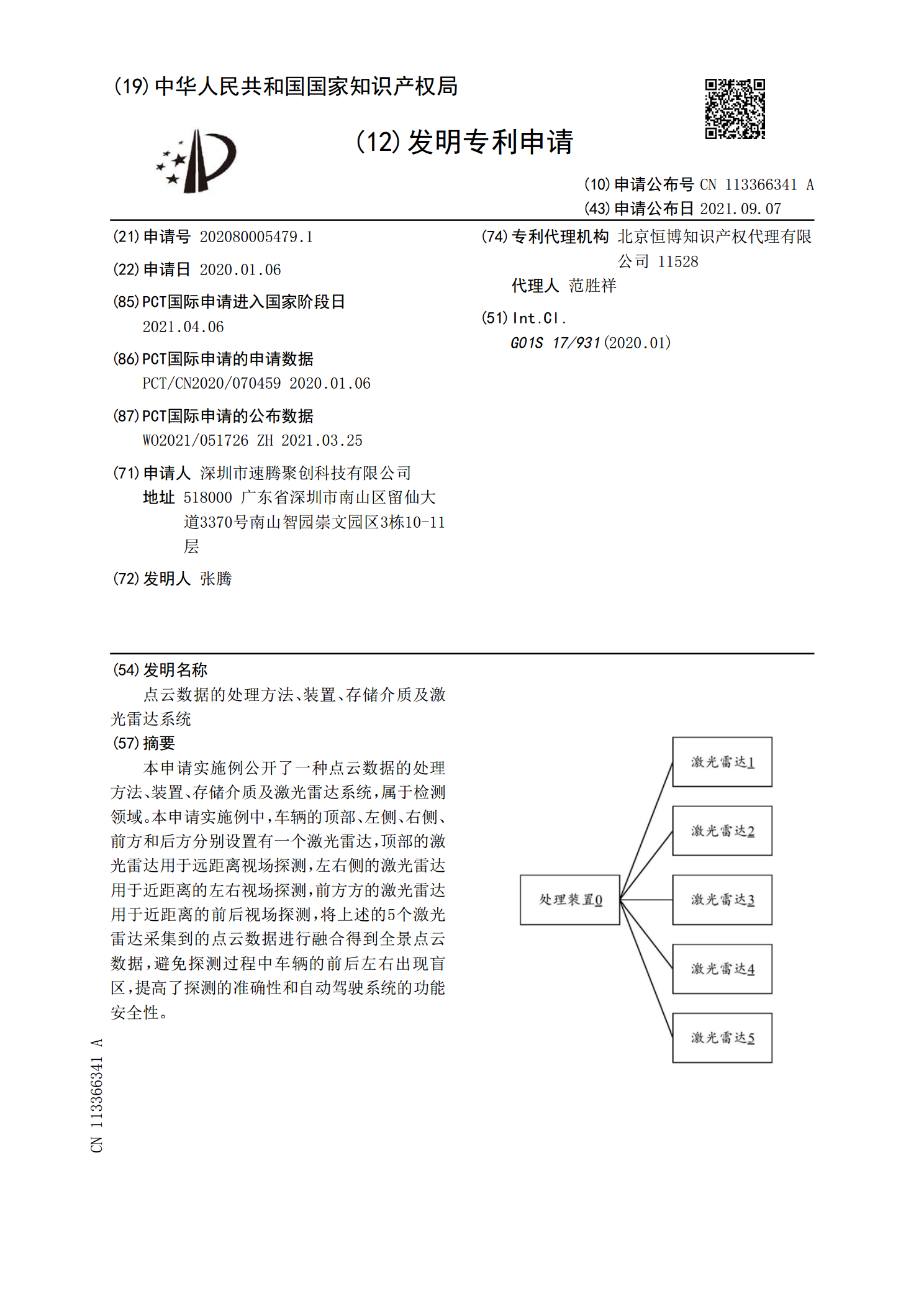
本申请实施例公开了一种点云数据的处理方法、装置、存储介质及激光雷达系统,属于检测领域。本申请实施例中,车辆的顶部、左侧、右侧、前方和后方分别设置有一个激光雷达,顶部的激光雷达用于远距离视场探测,左右侧的激光雷达用于近距离的左右视场探测,前方方的激光雷达用于近距离的前后视场探测,将上述的5个激光雷达采集到的点云数据进行融合得到全景点云数据,避免探测过程中车辆的前后左右出现盲区,提高了探测的准确性和自动驾驶系统的功能安全性。

机载激光雷达点云数据滤波方法研究的开题报告.docx
机载激光雷达点云数据滤波方法研究的开题报告一、研究背景及意义机载激光雷达是一种重要的三维数据获取设备,其获取的点云数据可以广泛应用于地图制作、地形测量、建筑物识别等领域。然而,由于机载激光雷达在获取点云数据时受到的诸多干扰,如地面杂物、建筑物遮挡和多次反射等,导致所得到的点云数据存在着很多的噪声和异常点,影响了其后续应用的精度和效果。因此,对机载激光雷达获取的点云数据进行滤波处理,是提高数据质量和减少后续应用误差的必要手段,是机载激光雷达应用领域中的热点和难点问题之一。二、研究内容本文将研究机载激光雷达点