
轨道几何检测系统标定方法及装置.pdf

淑然****by


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨道几何检测系统标定方法及装置.pdf
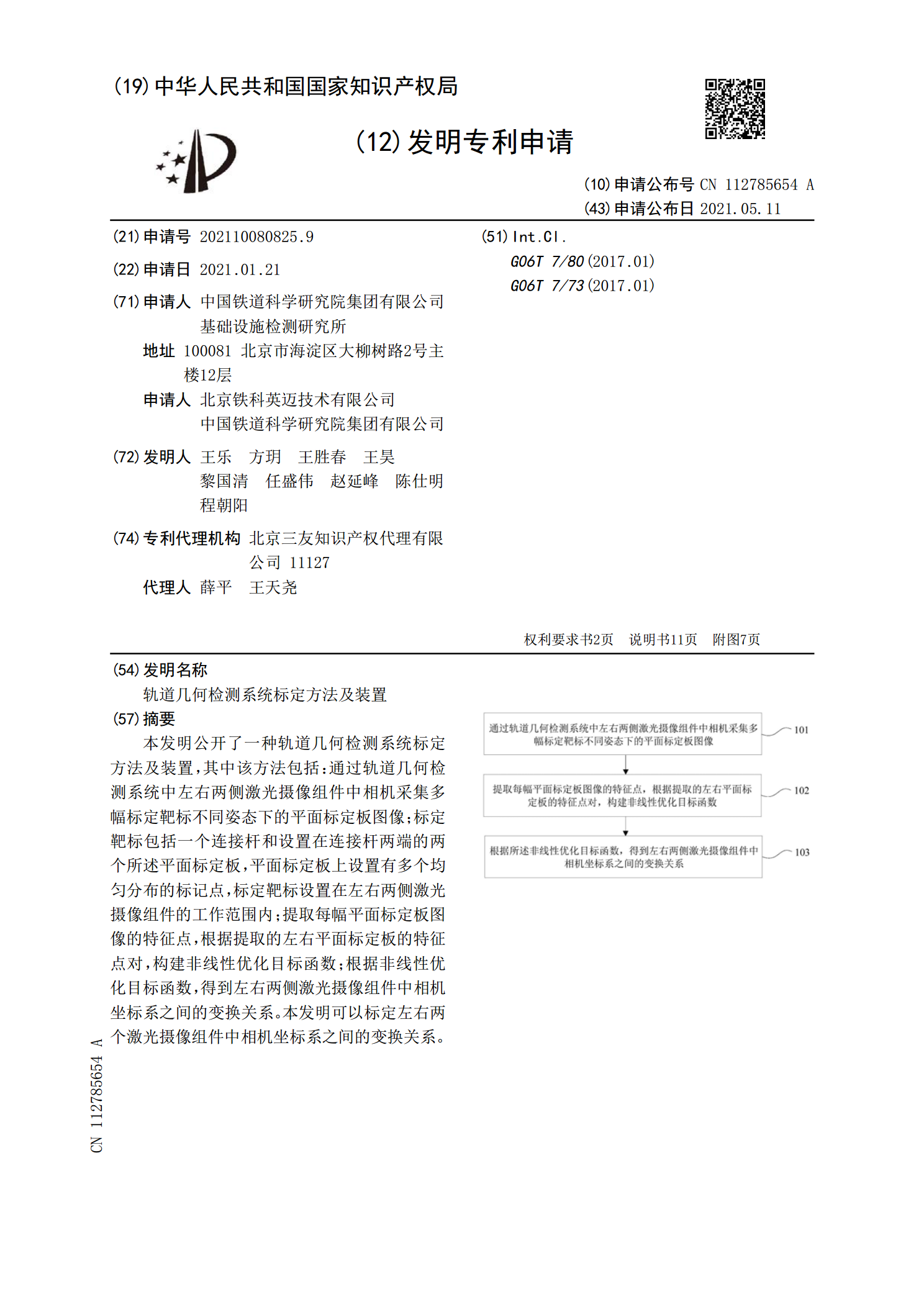
本发明公开了一种轨道几何检测系统标定方法及装置,其中该方法包括:通过轨道几何检测系统中左右两侧激光摄像组件中相机采集多幅标定靶标不同姿态下的平面标定板图像;标定靶标包括一个连接杆和设置在连接杆两端的两个所述平面标定板,平面标定板上设置有多个均匀分布的标记点,标定靶标设置在左右两侧激光摄像组件的工作范围内;提取每幅平面标定板图像的特征点,根据提取的左右平面标定板的特征点对,构建非线性优化目标函数;根据非线性优化目标函数,得到左右两侧激光摄像组件中相机坐标系之间的变换关系。本发明可以标定左右两个激光摄像组件中

轨道几何检测系统的动态校准方法及装置.pdf
本发明公开了一种轨道几何检测系统的动态校准方法及装置,该方法包括:获取轨道几何不平顺静态参数;获取轨道几何形位变化数据;所述轨道几何形位变化数据用于描述检测车经过所述轨道几何不平顺位置时钢轨的动静态差异变化,所述检测车搭载轨道几何检测系统;根据轨道几何不平顺静态参数和轨道几何形位变化数据,对轨道几何检测系统进行动态校准。本发明可实现对轨道几何检测系统的动态校准,解决了现有技术下难以在真实线路运行状态下对轨道几何检测系统的精度进行校准评价的问题,提高了轨道几何动态检测结果的可靠性、准确性,建立轨道几何检测系
列车轨道检测系统水平标定装置.pdf
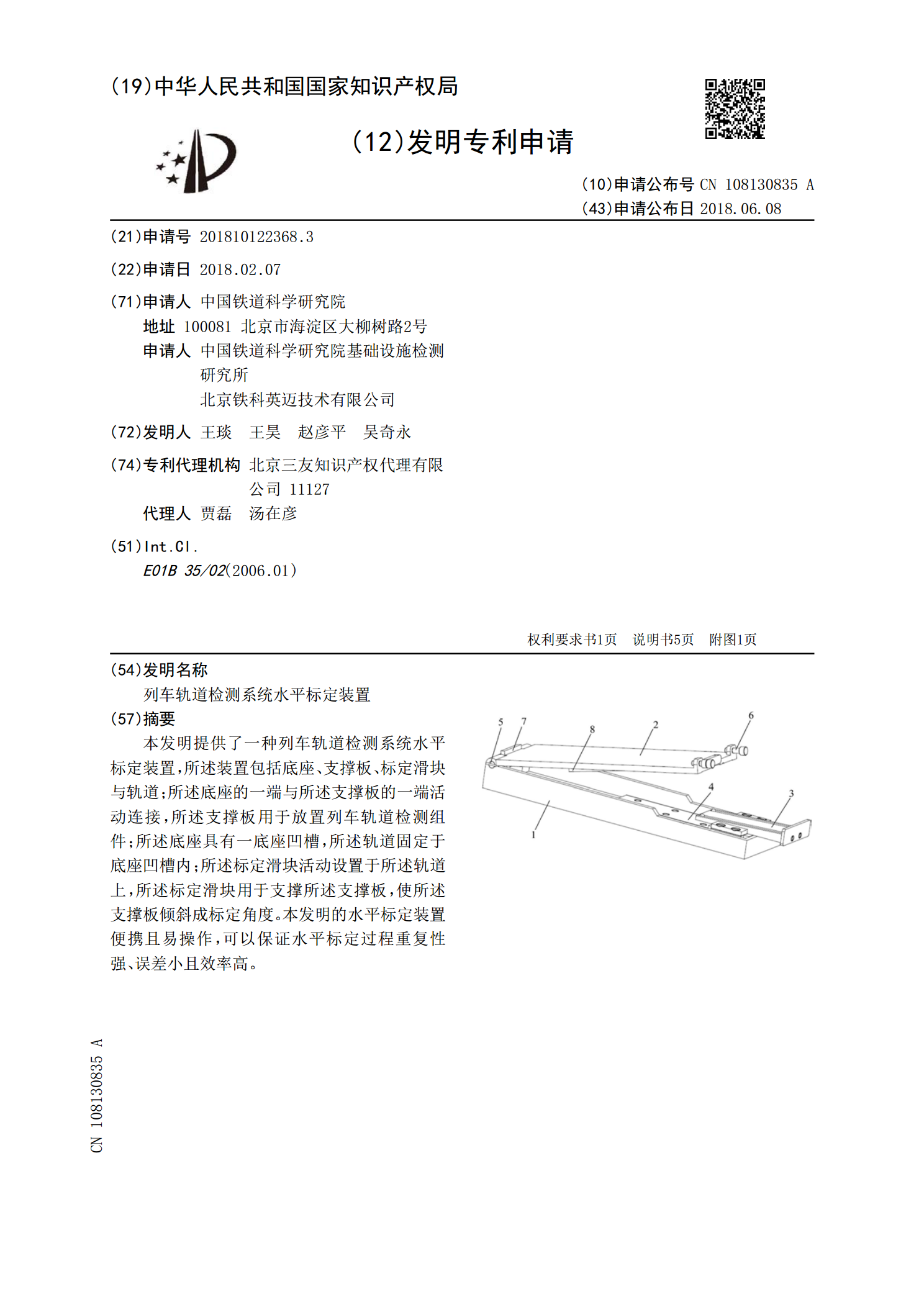
本发明提供了一种列车轨道检测系统水平标定装置,所述装置包括底座、支撑板、标定滑块与轨道;所述底座的一端与所述支撑板的一端活动连接,所述支撑板用于放置列车轨道检测组件;所述底座具有一底座凹槽,所述轨道固定于底座凹槽内;所述标定滑块活动设置于所述轨道上,所述标定滑块用于支撑所述支撑板,使所述支撑板倾斜成标定角度。本发明的水平标定装置便携且易操作,可以保证水平标定过程重复性强、误差小且效率高。
轨道几何检测系统激光平面调整方法及装置.pdf
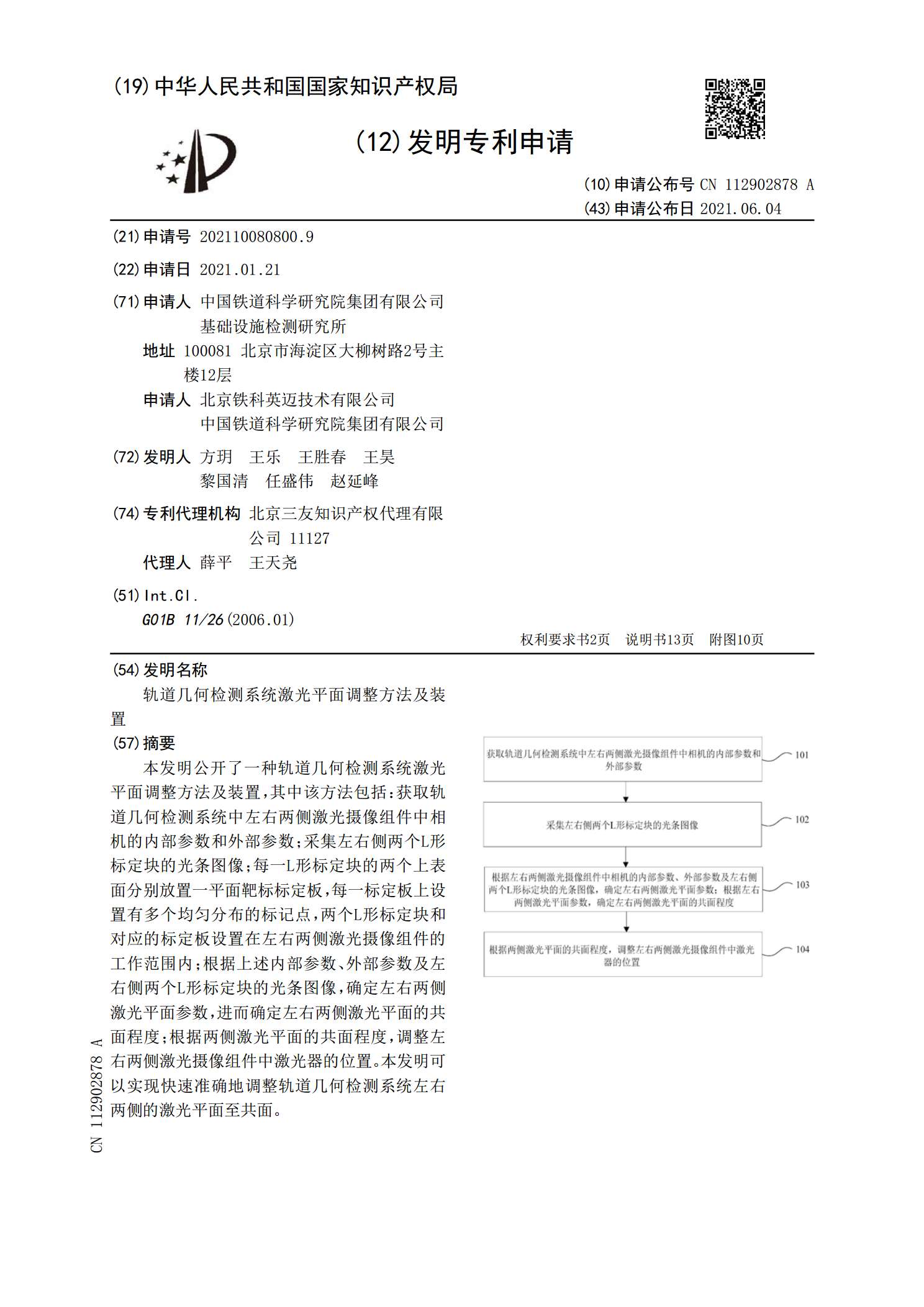
本发明公开了一种轨道几何检测系统激光平面调整方法及装置,其中该方法包括:获取轨道几何检测系统中左右两侧激光摄像组件中相机的内部参数和外部参数;采集左右侧两个L形标定块的光条图像;每一L形标定块的两个上表面分别放置一平面靶标标定板,每一标定板上设置有多个均匀分布的标记点,两个L形标定块和对应的标定板设置在左右两侧激光摄像组件的工作范围内;根据上述内部参数、外部参数及左右侧两个L形标定块的光条图像,确定左右两侧激光平面参数,进而确定左右两侧激光平面的共面程度;根据两侧激光平面的共面程度,调整左右两侧激光摄像组
一种轨道检测系统超高通道的自动标定装置和方法.pdf
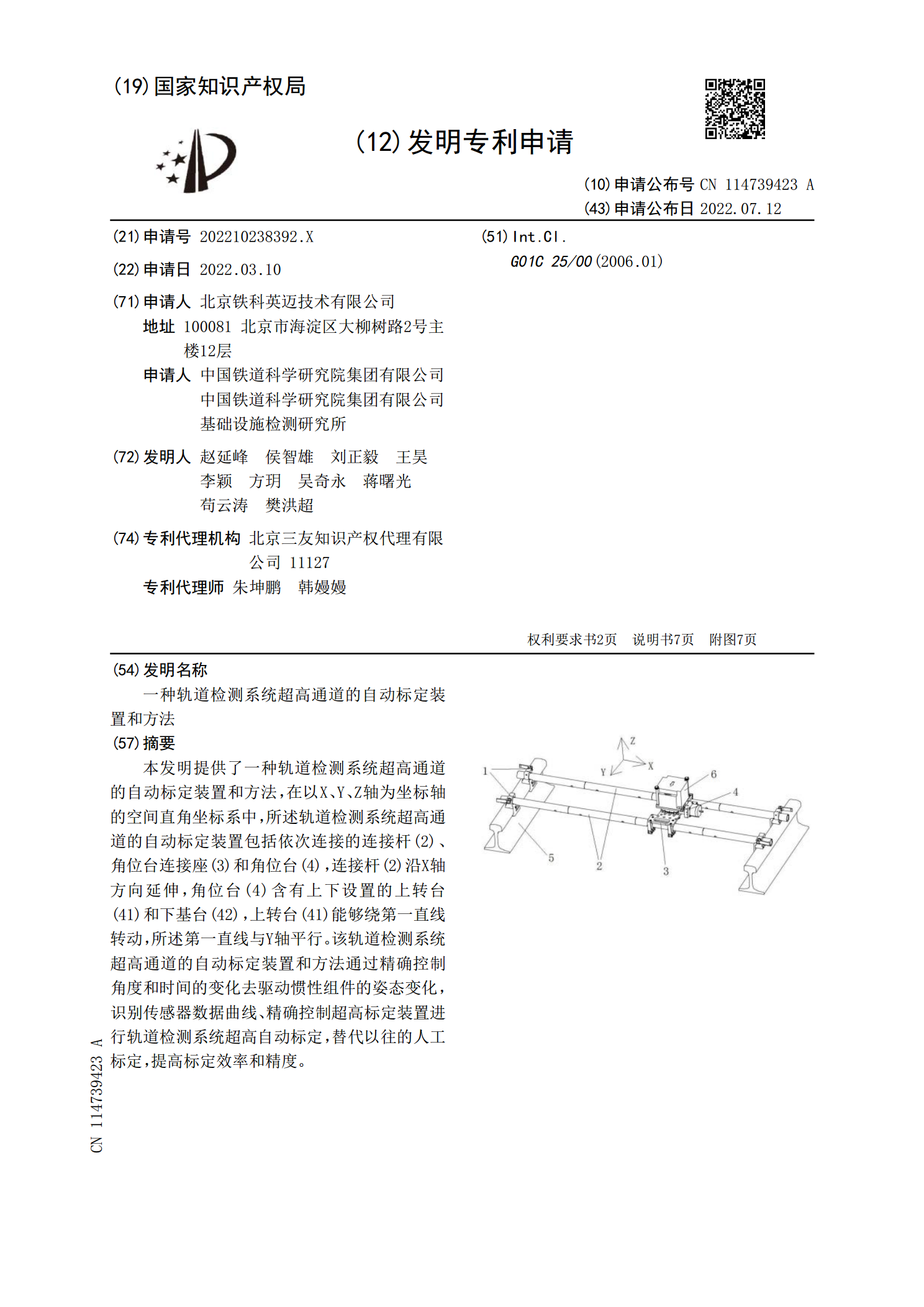
本发明提供了一种轨道检测系统超高通道的自动标定装置和方法,在以X、Y、Z轴为坐标轴的空间直角坐标系中,所述轨道检测系统超高通道的自动标定装置包括依次连接的连接杆(2)、角位台连接座(3)和角位台(4),连接杆(2)沿X轴方向延伸,角位台(4)含有上下设置的上转台(41)和下基台(42),上转台(41)能够绕第一直线转动,所述第一直线与Y轴平行。该轨道检测系统超高通道的自动标定装置和方法通过精确控制角度和时间的变化去驱动惯性组件的姿态变化,识别传感器数据曲线、精确控制超高标定装置进行轨道检测系统超高自动标定