
智能车自动避障装置及控制方法.pdf

明轩****la

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能车自动避障装置及控制方法.pdf
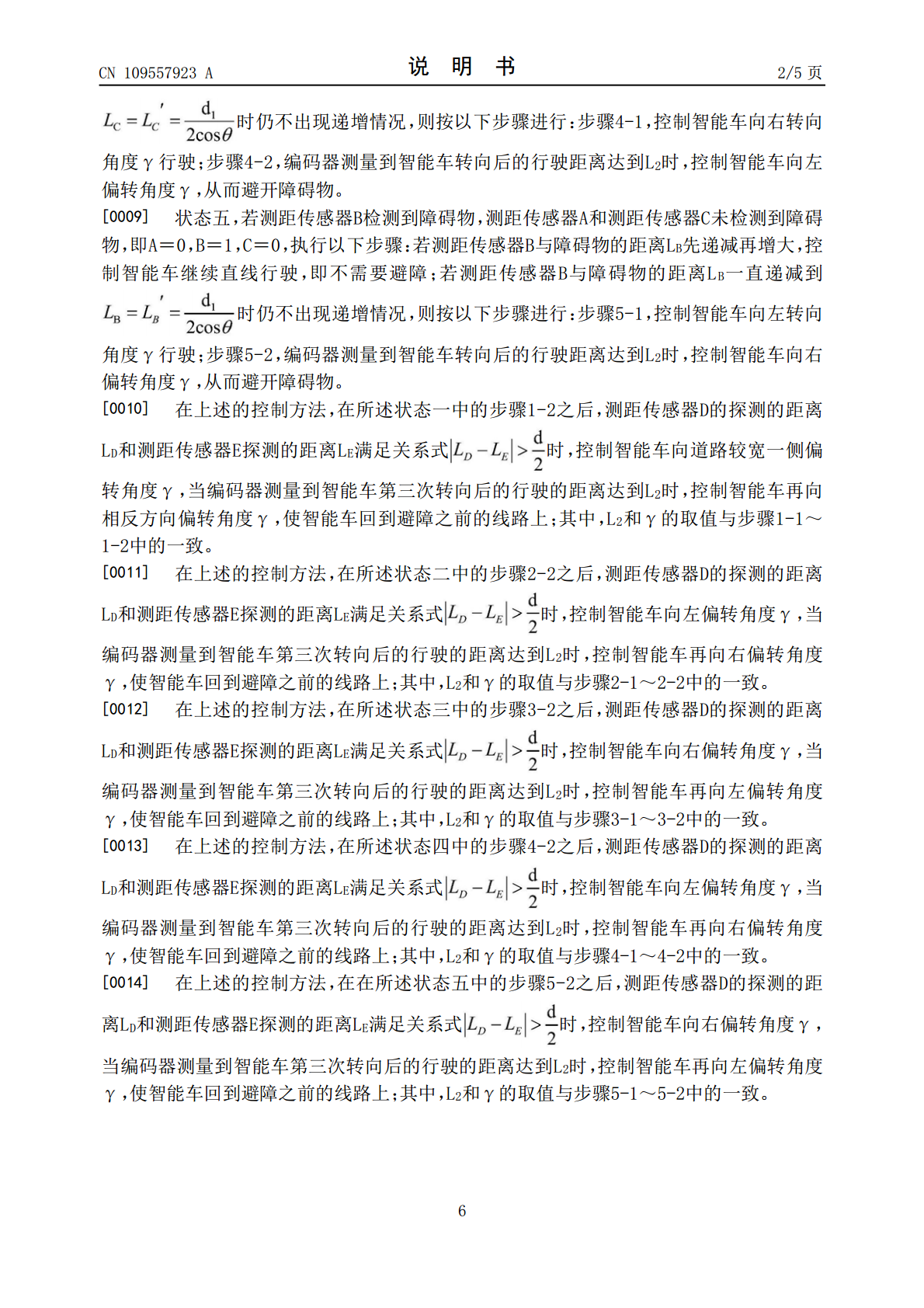
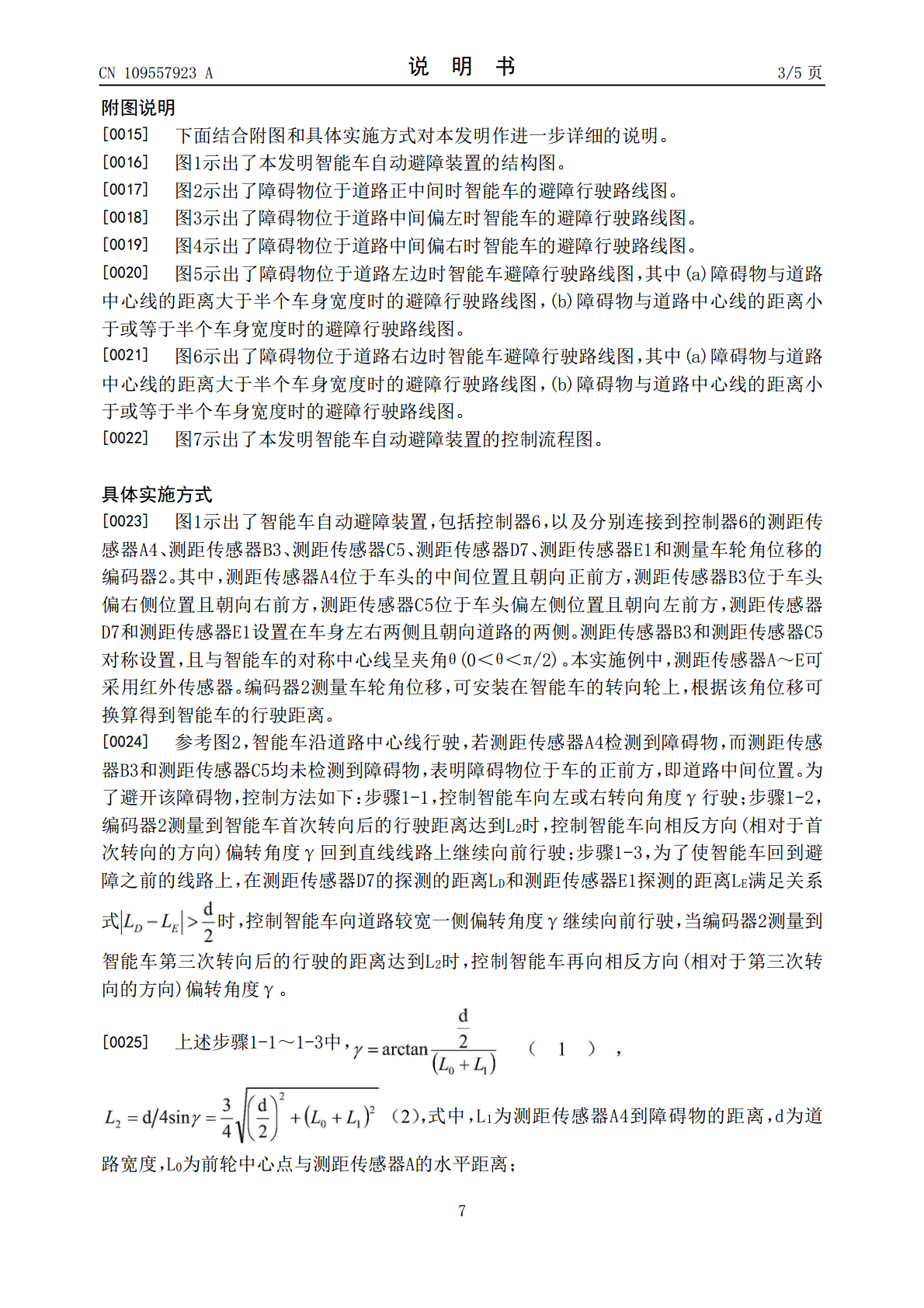
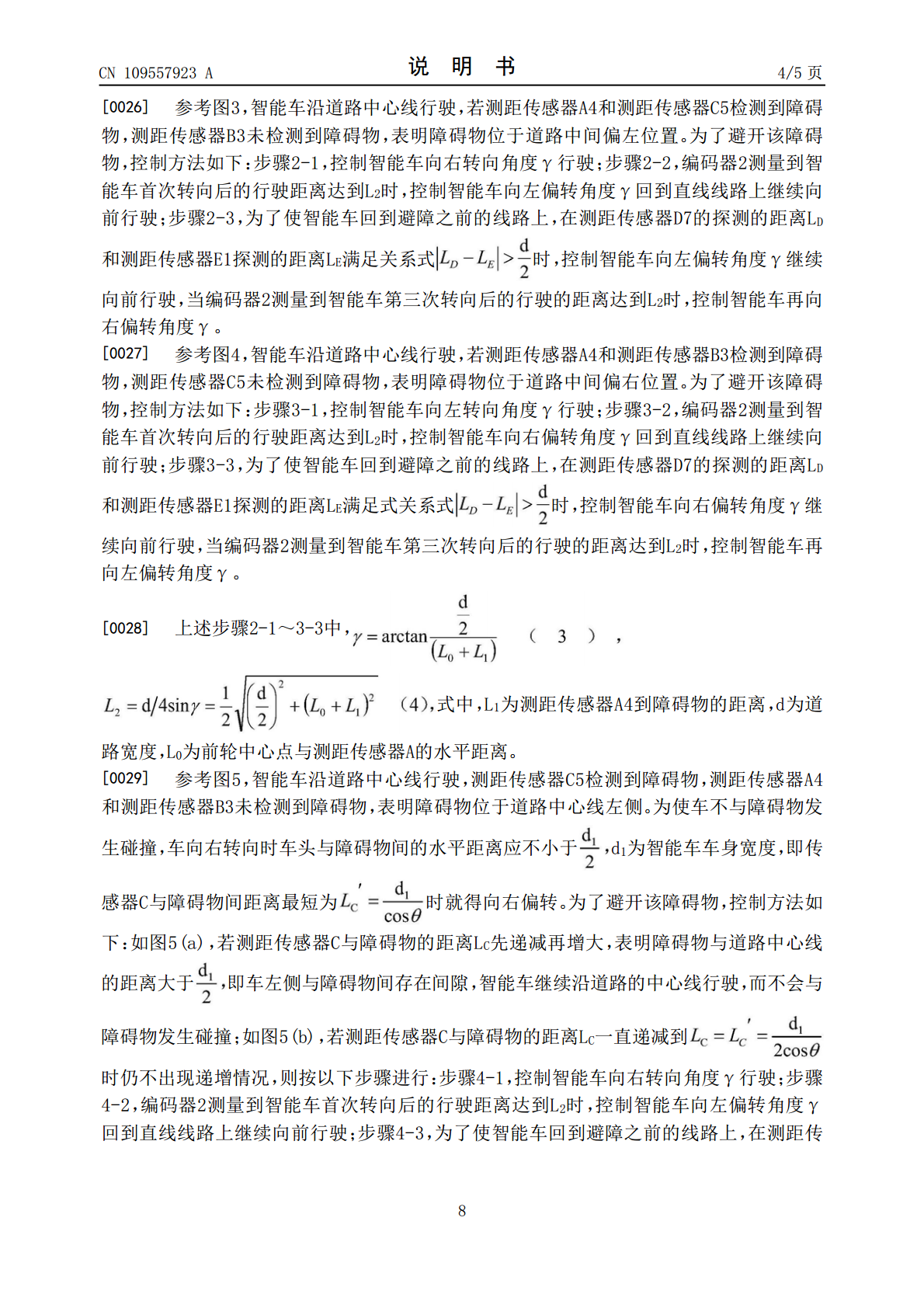
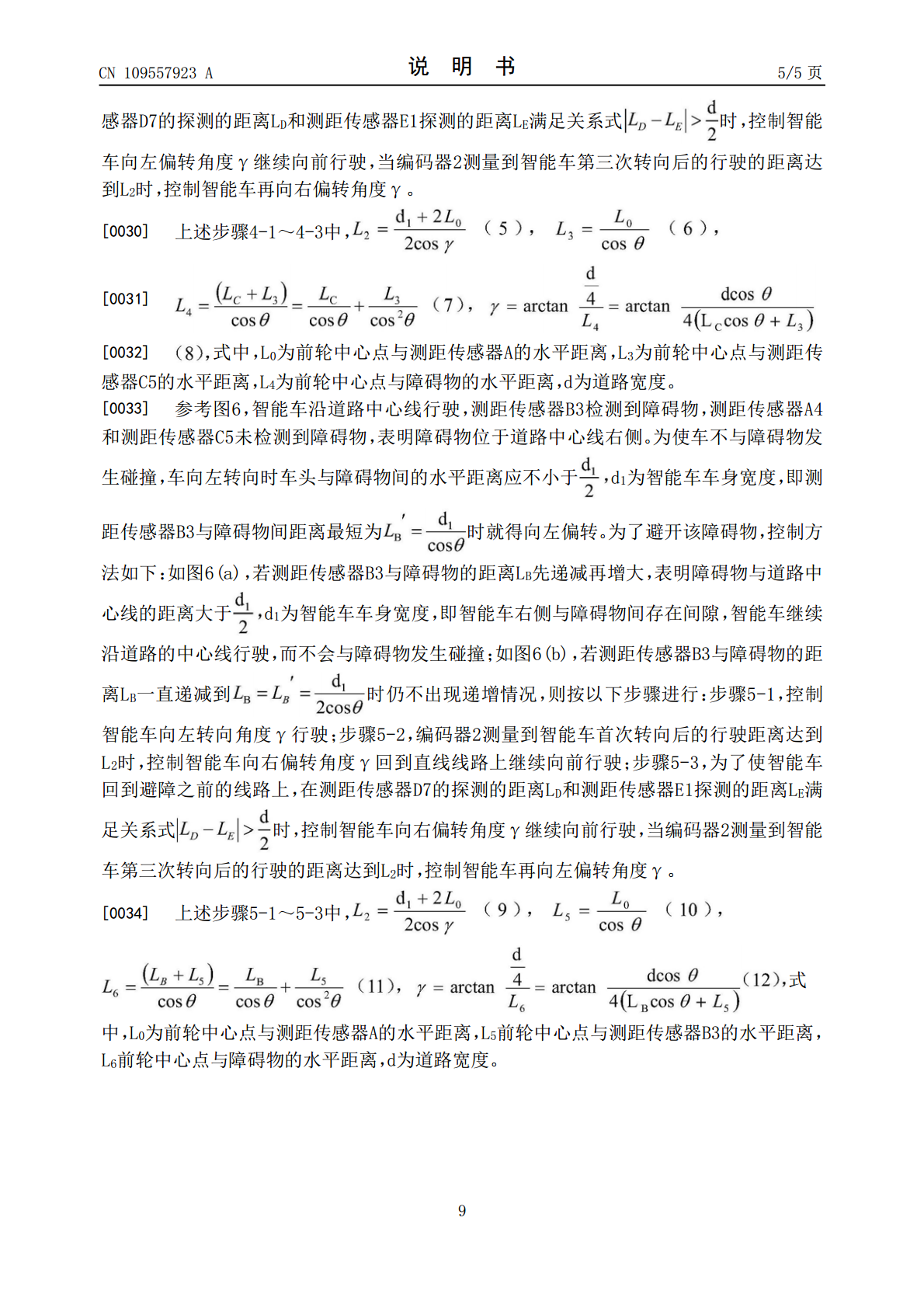
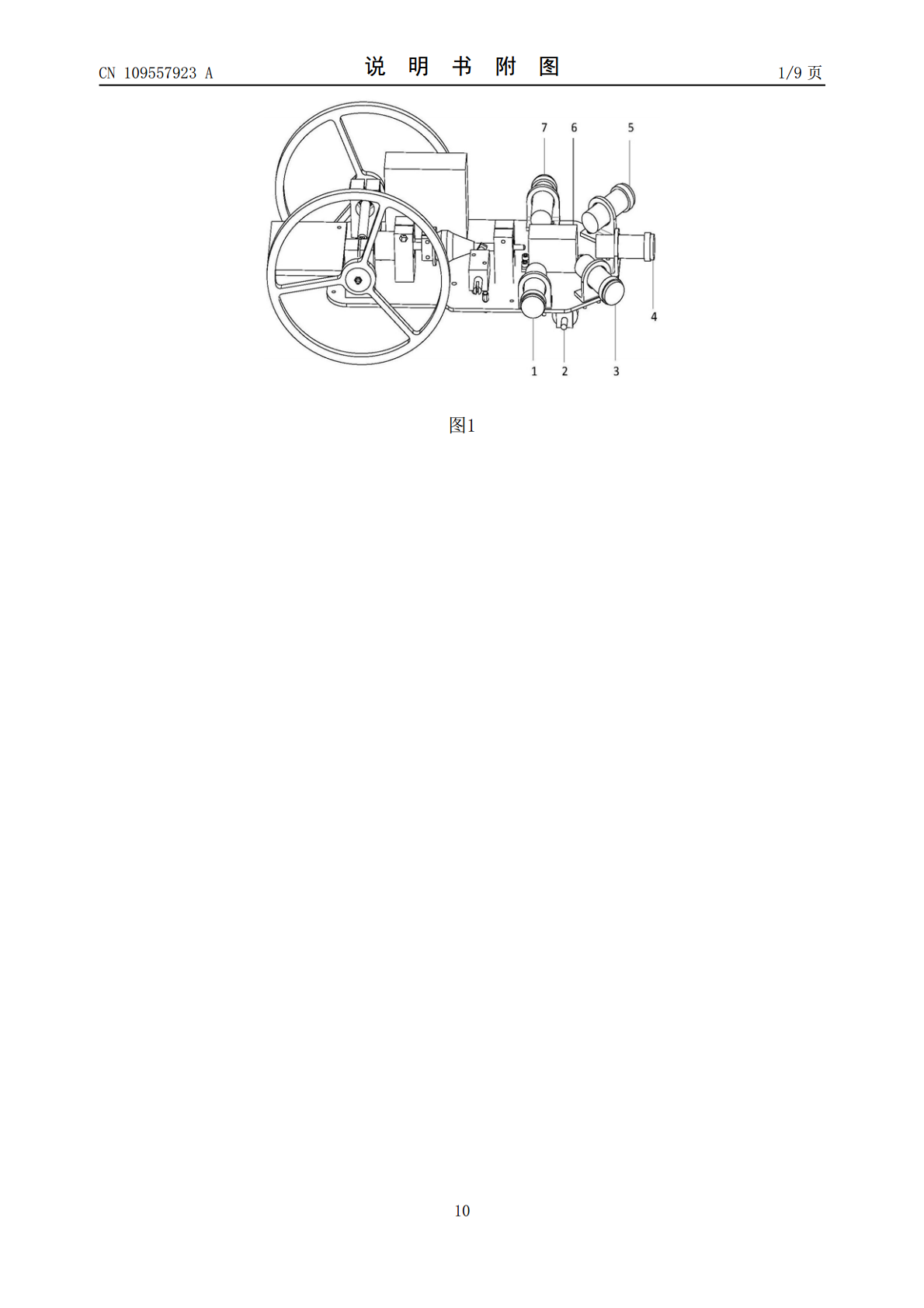
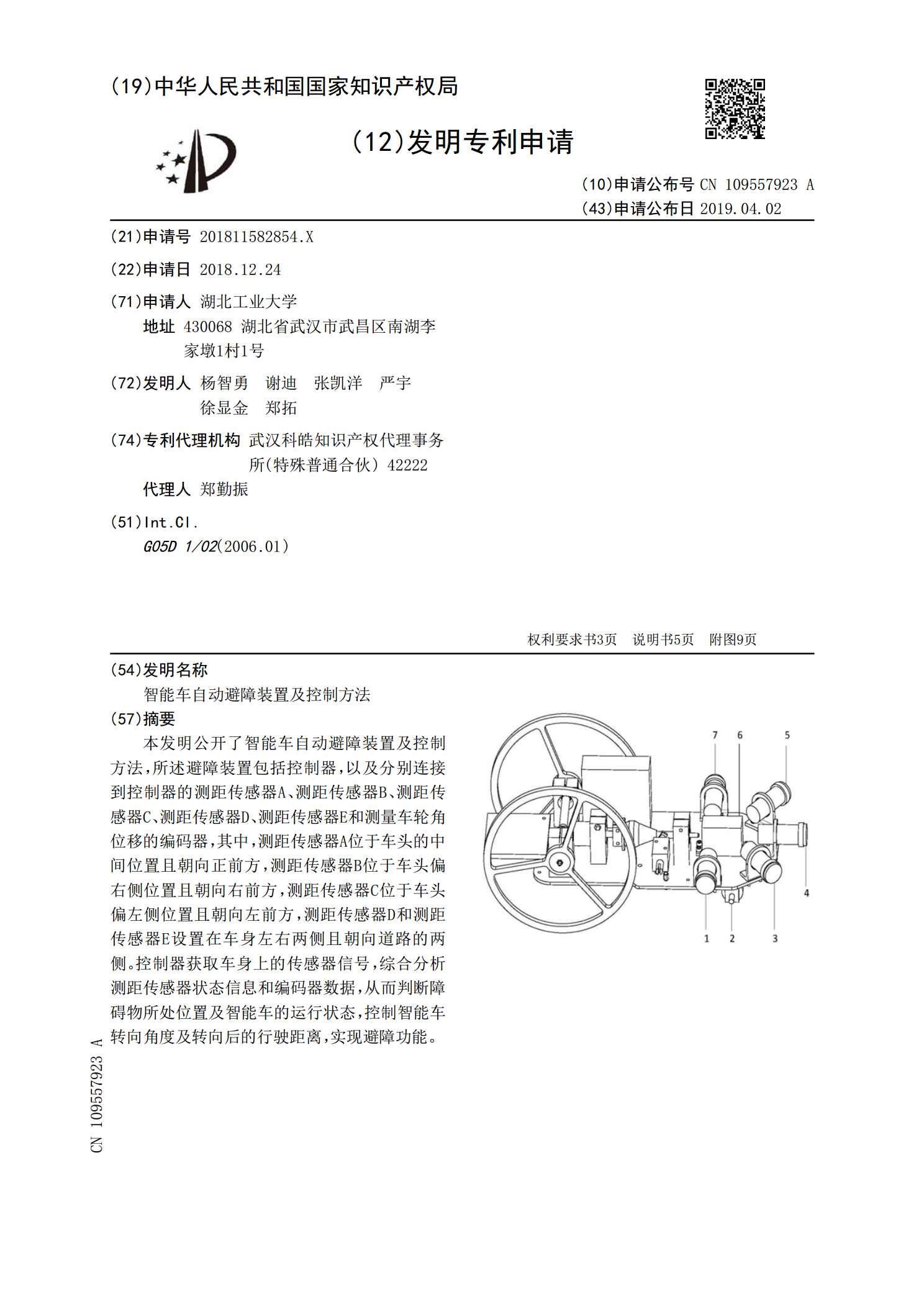
本发明公开了智能车自动避障装置及控制方法,所述避障装置包括控制器,以及分别连接到控制器的测距传感器A、测距传感器B、测距传感器C、测距传感器D、测距传感器E和测量车轮角位移的编码器,其中,测距传感器A位于车头的中间位置且朝向正前方,测距传感器B位于车头偏右侧位置且朝向右前方,测距传感器C位于车头偏左侧位置且朝向左前方,测距传感器D和测距传感器E设置在车身左右两侧且朝向道路的两侧。控制器获取车身上的传感器信号,综合分析测距传感器状态信息和编码器数据,从而判断障碍物所处位置及智能车的运行状态,控制智能车转向角
避障方法及装置、自动导航装置.pdf
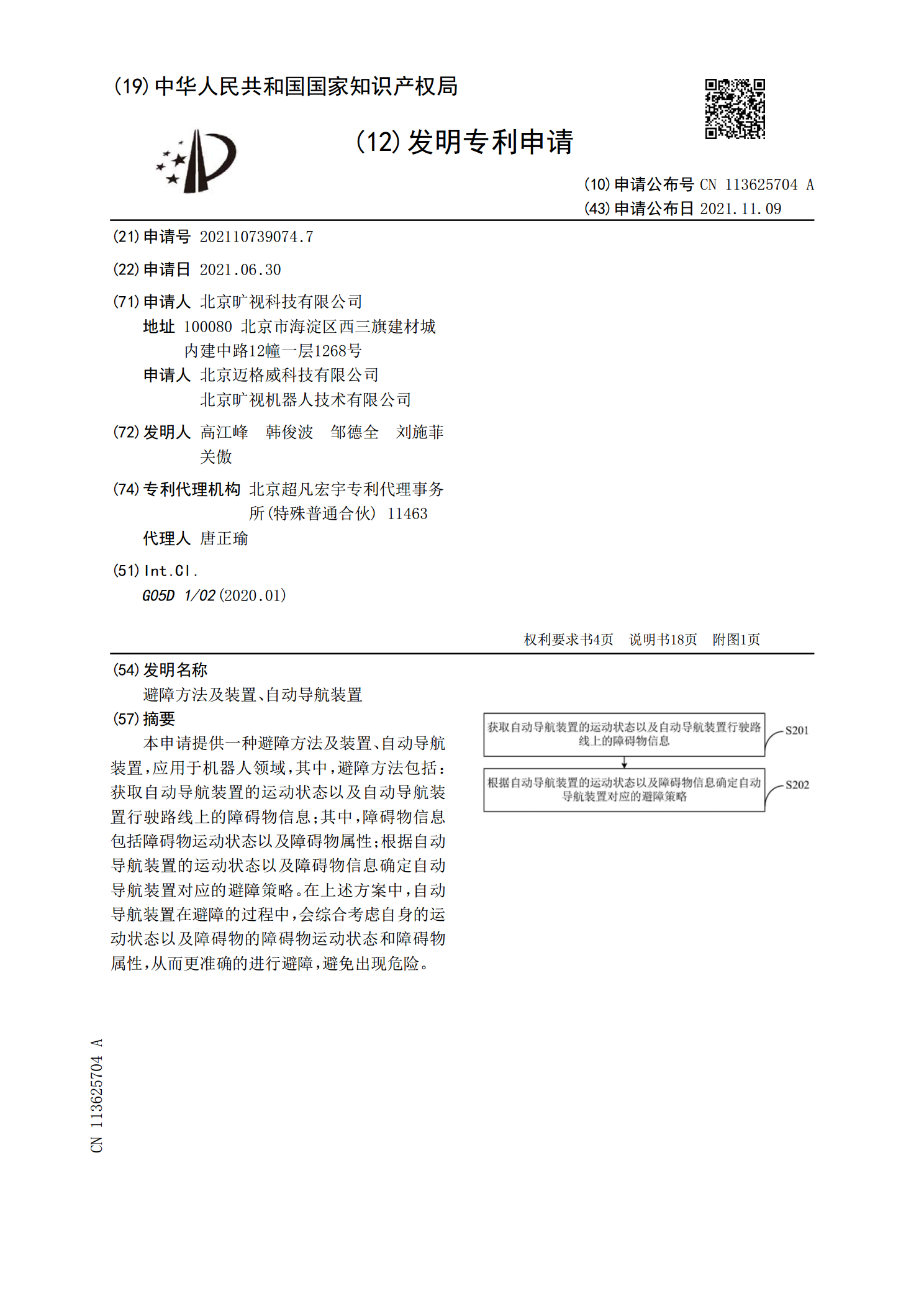
本申请提供一种避障方法及装置、自动导航装置,应用于机器人领域,其中,避障方法包括:获取自动导航装置的运动状态以及自动导航装置行驶路线上的障碍物信息;其中,障碍物信息包括障碍物运动状态以及障碍物属性;根据自动导航装置的运动状态以及障碍物信息确定自动导航装置对应的避障策略。在上述方案中,自动导航装置在避障的过程中,会综合考虑自身的运动状态以及障碍物的障碍物运动状态和障碍物属性,从而更准确的进行避障,避免出现危险。
自动避障扫地车.pdf
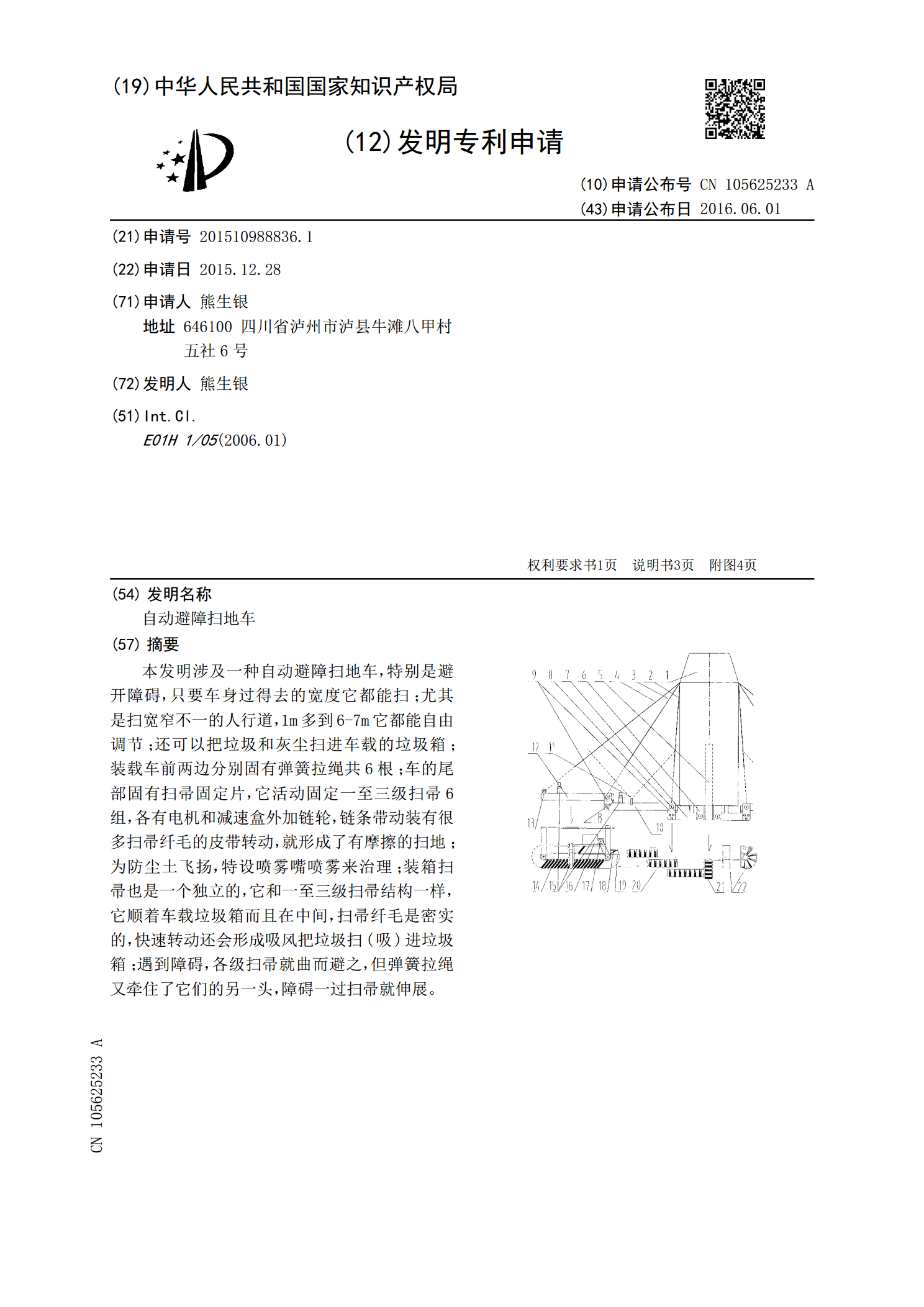
本发明涉及一种自动避障扫地车,特别是避开障碍,只要车身过得去的宽度它都能扫;尤其是扫宽窄不一的人行道,1m多到6-7m它都能自由调节;还可以把垃圾和灰尘扫进车载的垃圾箱;装载车前两边分别固有弹簧拉绳共6根;车的尾部固有扫帚固定片,它活动固定一至三级扫帚6组,各有电机和减速盒外加链轮,链条带动装有很多扫帚纤毛的皮带转动,就形成了有摩擦的扫地;为防尘土飞扬,特设喷雾嘴喷雾来治理;装箱扫帚也是一个独立的,它和一至三级扫帚结构一样,它顺着车载垃圾箱而且在中间,扫帚纤毛是密实的,快速转动还会形成吸风把垃圾扫(吸)进
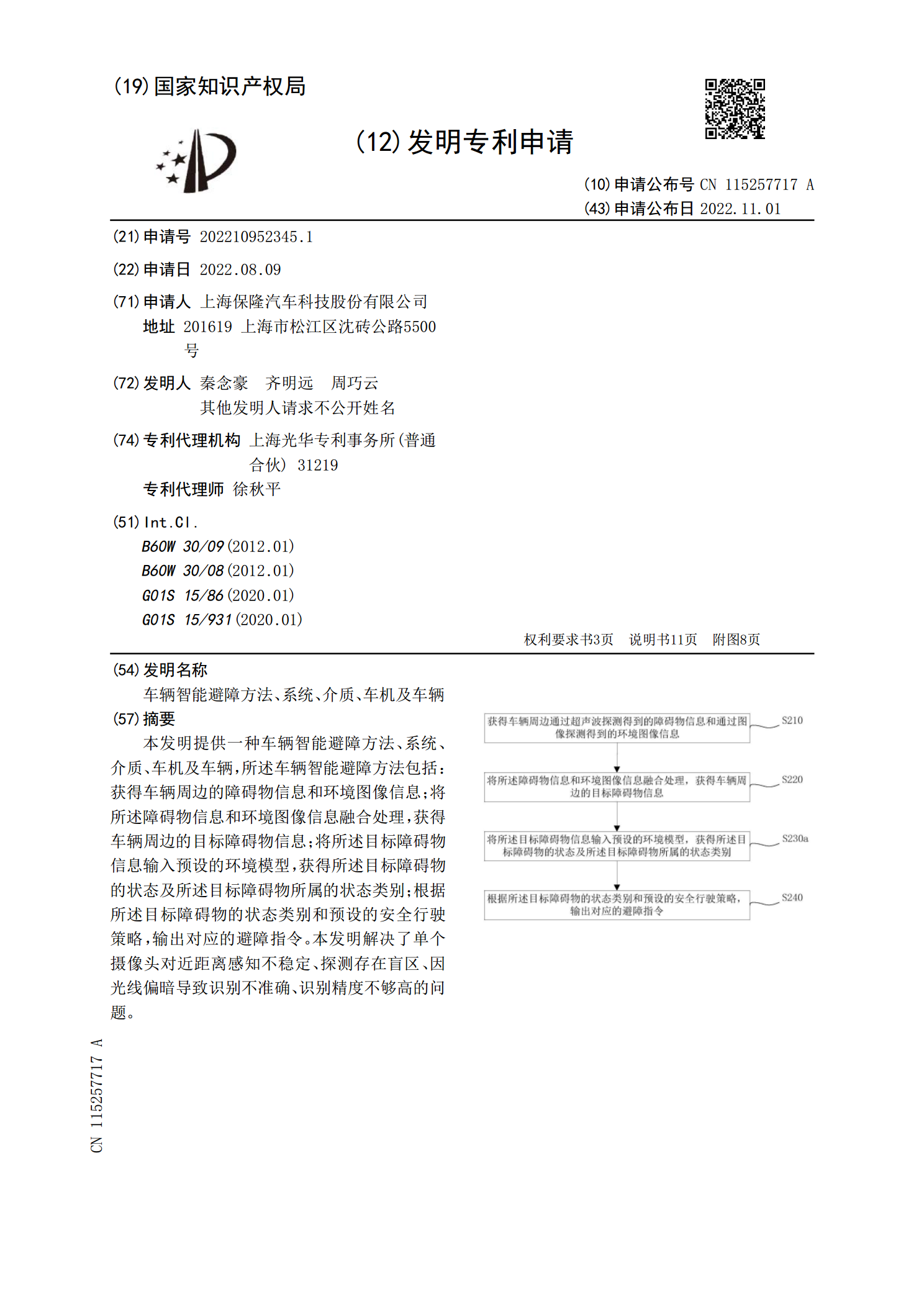
车辆智能避障方法、系统、介质、车机及车辆.pdf
本发明提供一种车辆智能避障方法、系统、介质、车机及车辆,所述车辆智能避障方法包括:获得车辆周边的障碍物信息和环境图像信息;将所述障碍物信息和环境图像信息融合处理,获得车辆周边的目标障碍物信息;将所述目标障碍物信息输入预设的环境模型,获得所述目标障碍物的状态及所述目标障碍物所属的状态类别;根据所述目标障碍物的状态类别和预设的安全行驶策略,输出对应的避障指令。本发明解决了单个摄像头对近距离感知不稳定、探测存在盲区、因光线偏暗导致识别不准确、识别精度不够高的问题。
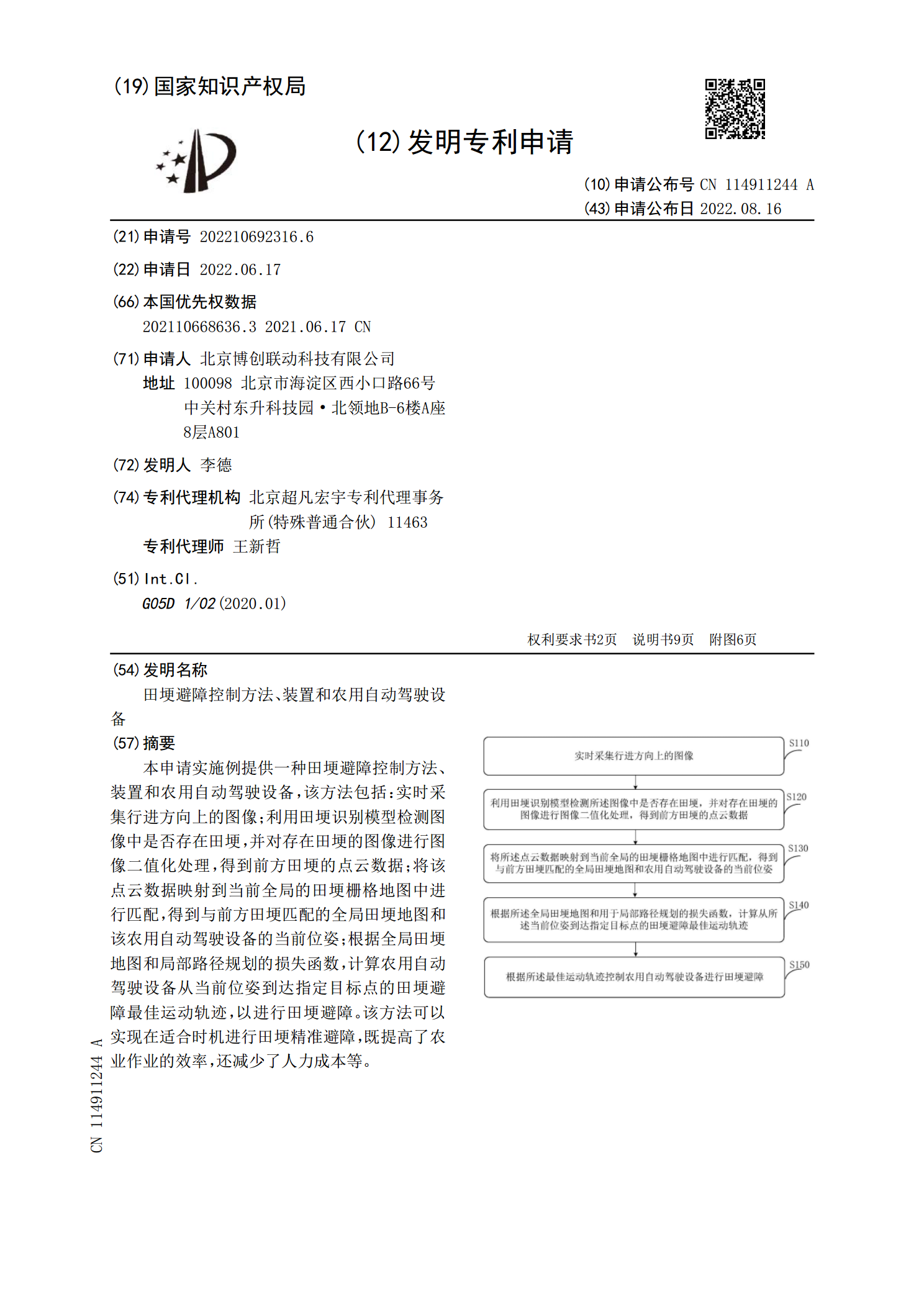
田埂避障控制方法、装置和农用自动驾驶设备.pdf
本申请实施例提供一种田埂避障控制方法、装置和农用自动驾驶设备,该方法包括:实时采集行进方向上的图像;利用田埂识别模型检测图像中是否存在田埂,并对存在田埂的图像进行图像二值化处理,得到前方田埂的点云数据;将该点云数据映射到当前全局的田埂栅格地图中进行匹配,得到与前方田埂匹配的全局田埂地图和该农用自动驾驶设备的当前位姿;根据全局田埂地图和局部路径规划的损失函数,计算农用自动驾驶设备从当前位姿到达指定目标点的田埂避障最佳运动轨迹,以进行田埂避障。该方法可以实现在适合时机进行田埂精准避障,既提高了农业作业的效率,