
一种高精度精密定位运动规划方法.pdf

长春****主a

1/7
2/7
3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度精密定位运动规划方法.pdf
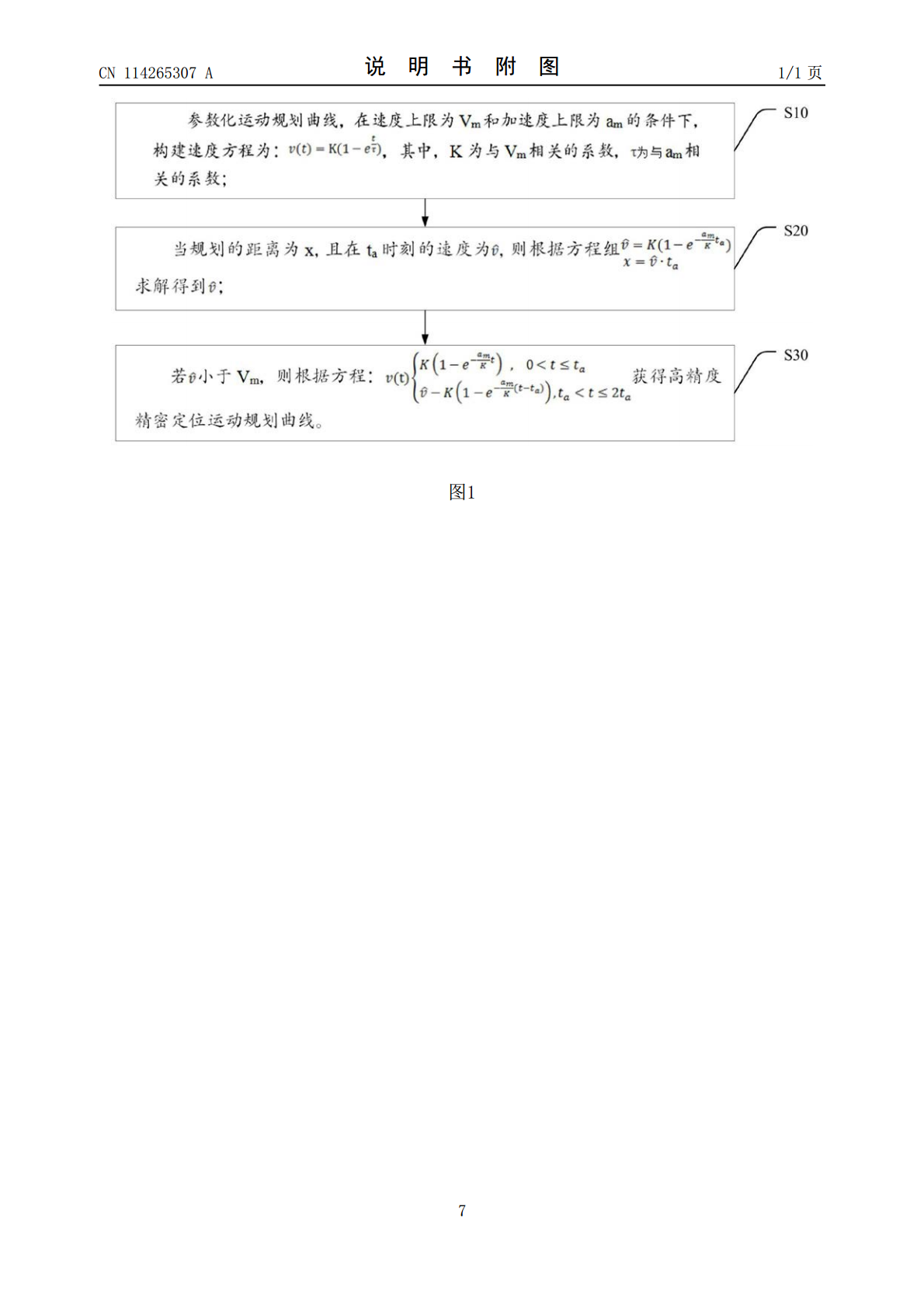
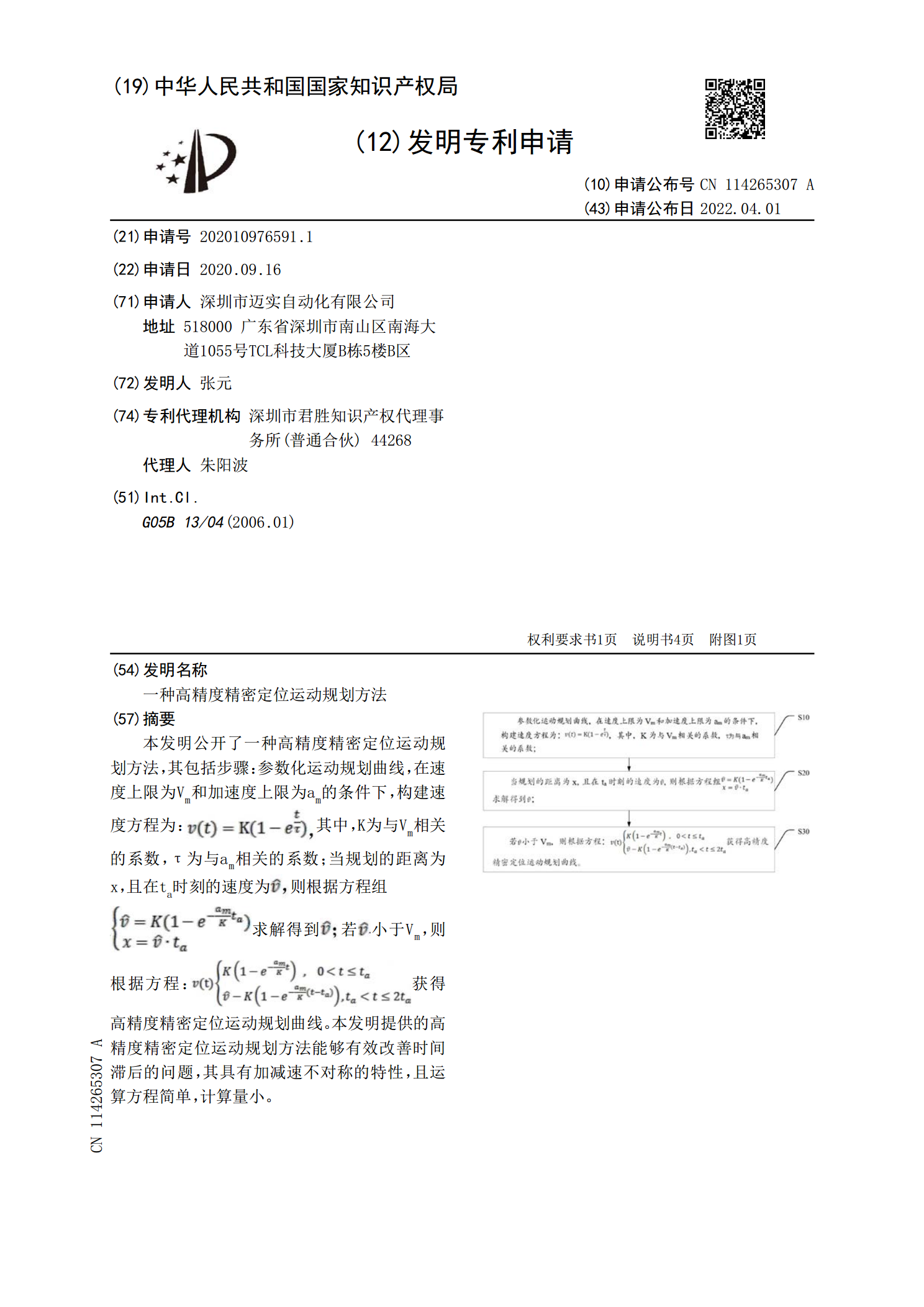
本发明公开了一种高精度精密定位运动规划方法,其包括步骤:参数化运动规划曲线,在速度上限为V

高速宏微运动平台及精密定位方法.docx
高速宏微运动平台及精密定位方法摘要:高速宏微运动平台是一种具有高精度和高速运动能力的机电一体化装置,广泛应用于精密制造、精密测量和精密操控等领域。随着科技的发展,对高速宏微运动平台及精密定位方法的需求越来越迫切。本文首先介绍了高速宏微运动平台的概念、结构和工作原理,然后重点讨论了高速宏微运动平台的精密定位方法,包括传感器测量、控制算法和基于视觉的定位方法。最后,通过实验验证了所提出的精密定位方法在高速宏微运动平台中的可行性和有效性。研究表明,高速宏微运动平台及精密定位方法在实际应用中具有较高的精度和稳定性

一种泵用高精度叶轮的精密制造方法.pdf
一种泵用高精度叶轮的精密制造方法,属于金属成型技术领域。该技术是利用精密铸造基本技术,通过对制壳环节工艺技术的改进,使得形成叶轮内腔流道壳型的强度、光洁度、透气性都大幅度提升或改善,从而使液态金属浇注成型后,金属叶轮流道表面的粗糙度达到6.3~3.2,精度达到CT4~CT6级,基本达到机械加工表面粗糙度水平。采用这种技术方法制造的叶轮与现有传统砂型铸造叶轮相比较,其精度和表面粗糙度成倍数提高,从而使泵的性能发生明显的改变。这种技术可以广泛的适用于各种泵的叶轮制造,具有非常显著的经济效益与社会效益。

一种高精度AP定位方法及装置.pdf
本发明公开了一种高精度AP定位方法及装置,利用信号的加速度移动的位置统计特征和不同位置的AP接入点特征,将需要提供位置服务的空间区域划分成多个定位子块,判断定位信息是否落入的置信区间,当定位信息不在置信区间内标记为盲区定位信息,在当定位信息为盲区定位信息时将相邻区域的平均速度值记录为过渡加速度,根据过渡加速度修正当前的定位坐标,将相邻区域的平均速度值记录为过渡加速度,提高了定位精度,修正死角和障碍物、定位信号盲区之间的定位误差以及精度,大大提高了室内定位方法的精度和定位效率。
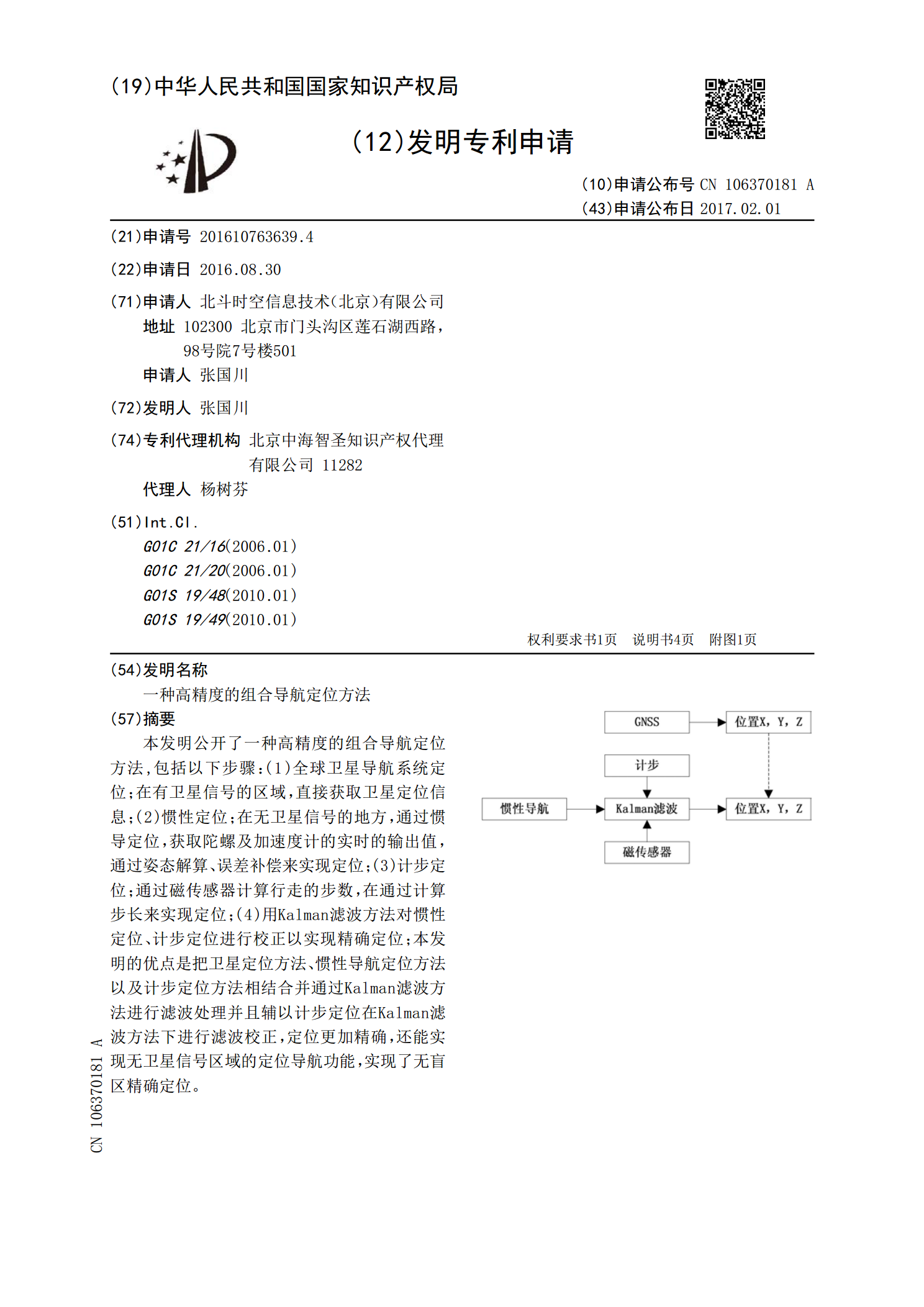
一种高精度的组合导航定位方法.pdf
本发明公开了一种高精度的组合导航定位方法,包括以下步骤:(1)全球卫星导航系统定位;在有卫星信号的区域,直接获取卫星定位信息;(2)惯性定位;在无卫星信号的地方,通过惯导定位,获取陀螺及加速度计的实时的输出值,通过姿态解算、误差补偿来实现定位;(3)计步定位;通过磁传感器计算行走的步数,在通过计算步长来实现定位;(4)用Kalman滤波方法对惯性定位、计步定位进行校正以实现精确定位;本发明的优点是把卫星定位方法、惯性导航定位方法以及计步定位方法相结合并通过Kalman滤波方法进行滤波处理并且辅以计步定位在