
一种高精度AP定位方法及装置.pdf

Ch****91


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种高精度AP定位方法及装置.pdf
本发明公开了一种高精度AP定位方法及装置,利用信号的加速度移动的位置统计特征和不同位置的AP接入点特征,将需要提供位置服务的空间区域划分成多个定位子块,判断定位信息是否落入的置信区间,当定位信息不在置信区间内标记为盲区定位信息,在当定位信息为盲区定位信息时将相邻区域的平均速度值记录为过渡加速度,根据过渡加速度修正当前的定位坐标,将相邻区域的平均速度值记录为过渡加速度,提高了定位精度,修正死角和障碍物、定位信号盲区之间的定位误差以及精度,大大提高了室内定位方法的精度和定位效率。
一种倾斜锚杆群高精度定位装置及其定位方法.pdf
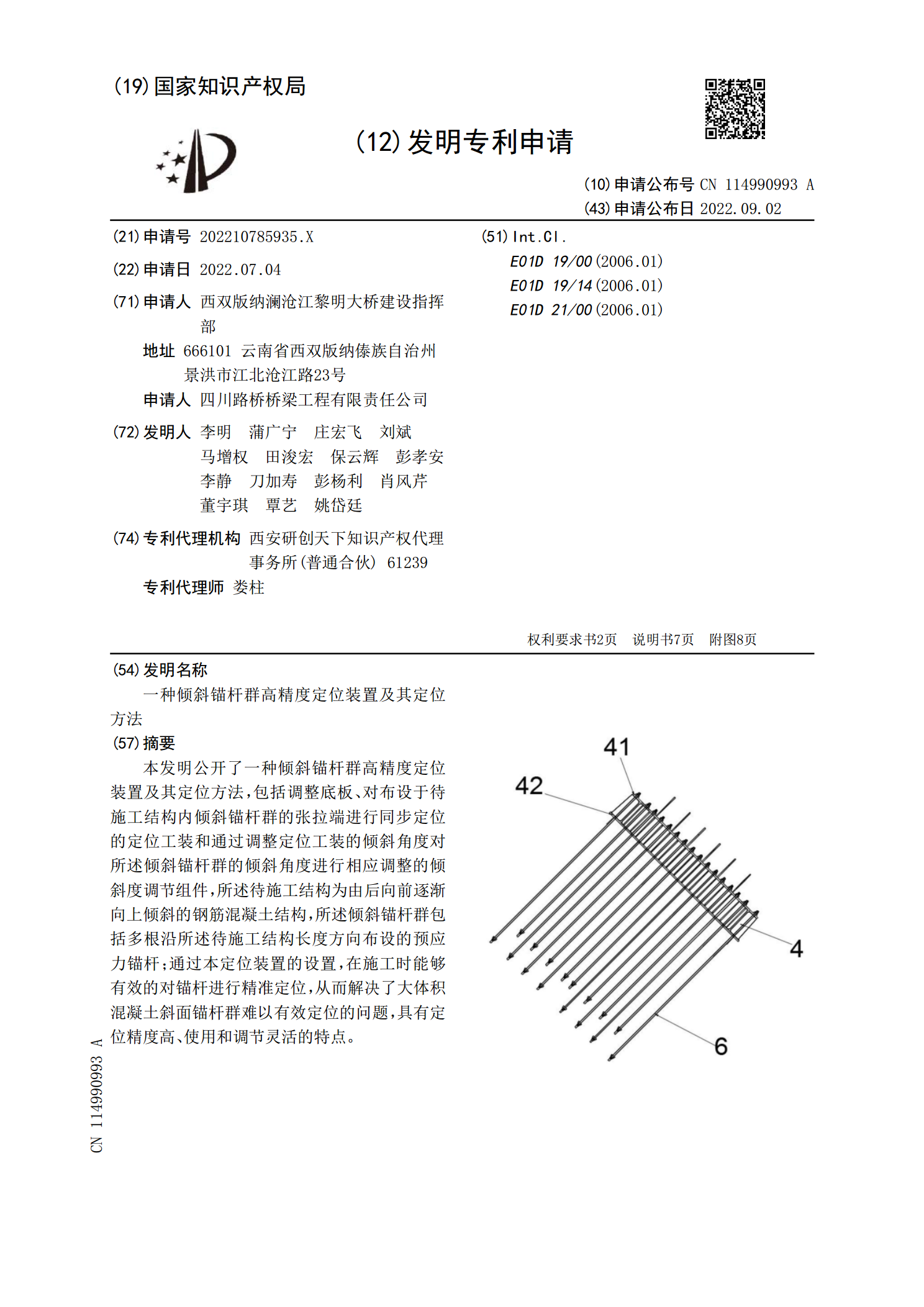
本发明公开了一种倾斜锚杆群高精度定位装置及其定位方法,包括调整底板、对布设于待施工结构内倾斜锚杆群的张拉端进行同步定位的定位工装和通过调整定位工装的倾斜角度对所述倾斜锚杆群的倾斜角度进行相应调整的倾斜度调节组件,所述待施工结构为由后向前逐渐向上倾斜的钢筋混凝土结构,所述倾斜锚杆群包括多根沿所述待施工结构长度方向布设的预应力锚杆;通过本定位装置的设置,在施工时能够有效的对锚杆进行精准定位,从而解决了大体积混凝土斜面锚杆群难以有效定位的问题,具有定位精度高、使用和调节灵活的特点。

一种AP室内自适应定位修正方法及装置.pdf
本发明公开了一种AP室内自适应定位修正方法及装置,为解决并纠正被测节点在运动时与在信号盲区范围中的大误差现象,实时监测AP定位的信号,计算定位节点的移动加速度速率和过渡定位速度阈值,计算平均加速度阈值,当定位节点的移动加速度速率大于平均加速度阈值,将定位坐标以过渡定位速度阈值修正,当过渡定位速度阈值大于或等于平均加速度阈值时恢复正常的AP定位,本发明修正了传统的AP室内的定位方法以保证AP室内自适应定位修正方法在高速变速运动、信号盲区等异常情况下的定位性能的稳定性与鲁棒性。

一种自动高精度定位装置.pdf
一种高精度定位装置,由固定座、传动齿轮、传动齿条、连接螺栓、固定板、编码器、联轴器所组成,固定座由钢板铣加工而成,中间有放置齿轮的长方形槽孔,固定座固定在下机体上,固定座一侧与固定板由连接螺栓连接,连接板上装有编码器,编码器经联轴器与齿轮连接,传动齿条固定在上台板一侧,齿轮与齿条连接配合在一起,工作时上台板上升,齿条也随着上升,牵动齿轮、编码器旋转,编码器释放信号,PLC控制模切裁断机械做精确模切。自动高精度定位装置用于冲裁机械产品的上下台板的冲裁距离精确定位,尤其适合高精度材料的精确冲裁机构的精确定位,

一种高精度输送定位装置.pdf
本发明提供一种高精度输送定位装置,用于输送滚筒,所述输送滚筒一侧设有侧推机构,用于推动货物实现横向定位;所述输送滚筒上还设有斜推机构和升降机构;所述升降机构用于阻挡货物,所述斜推机构斜向上运动,用于推动货物抵靠所述升降机构实现纵向定位。当货物运行至升降机构时,升降机构对货物进行阻挡,然后启动斜推机构推动货物,使货物抵靠升降机构,实现纵向定位,最后启动侧推机构推动货物,实现横向定位;综上所述,本发明解决了货物回弹的问题,提高了货物的定位精度。