
一种基于跟踪视觉识别算法的机械臂智能控制方法.pdf

雨巷****凝海

1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于跟踪视觉识别算法的机械臂智能控制方法.pdf
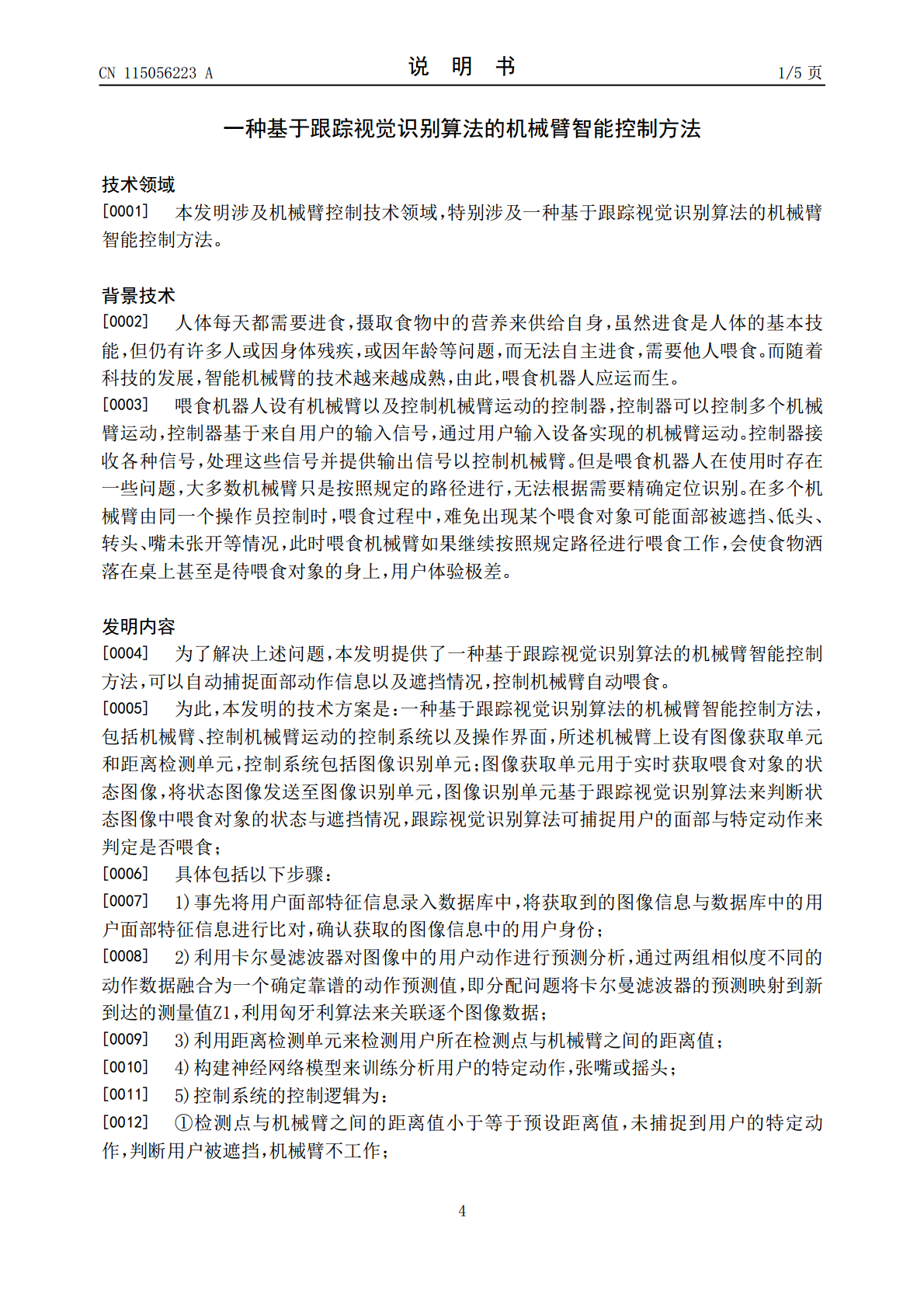
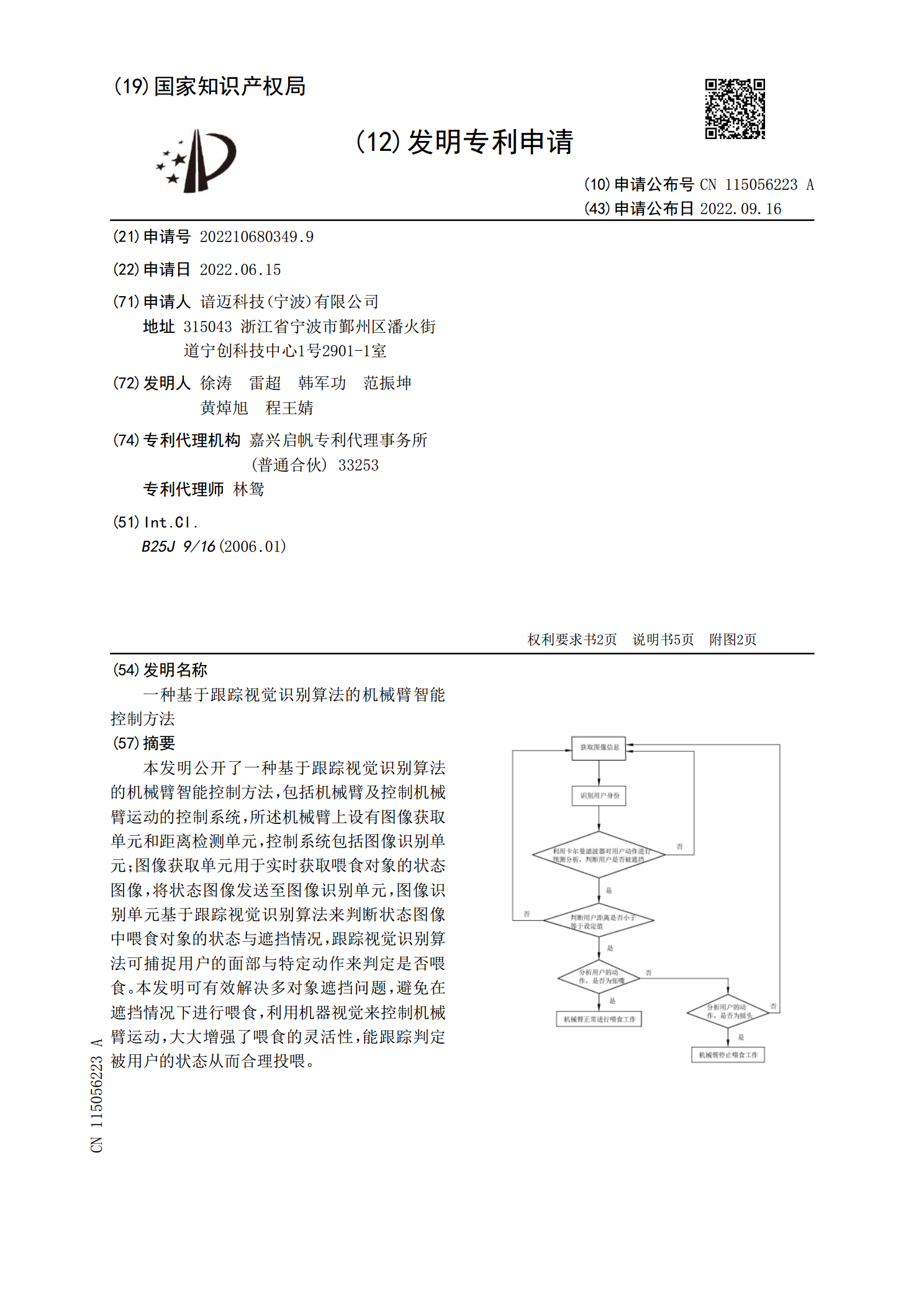
本发明公开了一种基于跟踪视觉识别算法的机械臂智能控制方法,包括机械臂及控制机械臂运动的控制系统,所述机械臂上设有图像获取单元和距离检测单元,控制系统包括图像识别单元;图像获取单元用于实时获取喂食对象的状态图像,将状态图像发送至图像识别单元,图像识别单元基于跟踪视觉识别算法来判断状态图像中喂食对象的状态与遮挡情况,跟踪视觉识别算法可捕捉用户的面部与特定动作来判定是否喂食。本发明可有效解决多对象遮挡问题,避免在遮挡情况下进行喂食,利用机器视觉来控制机械臂运动,大大增强了喂食的灵活性,能跟踪判定被用户的状态从而
一种基于视觉识别定位的机械臂导航方法.pdf
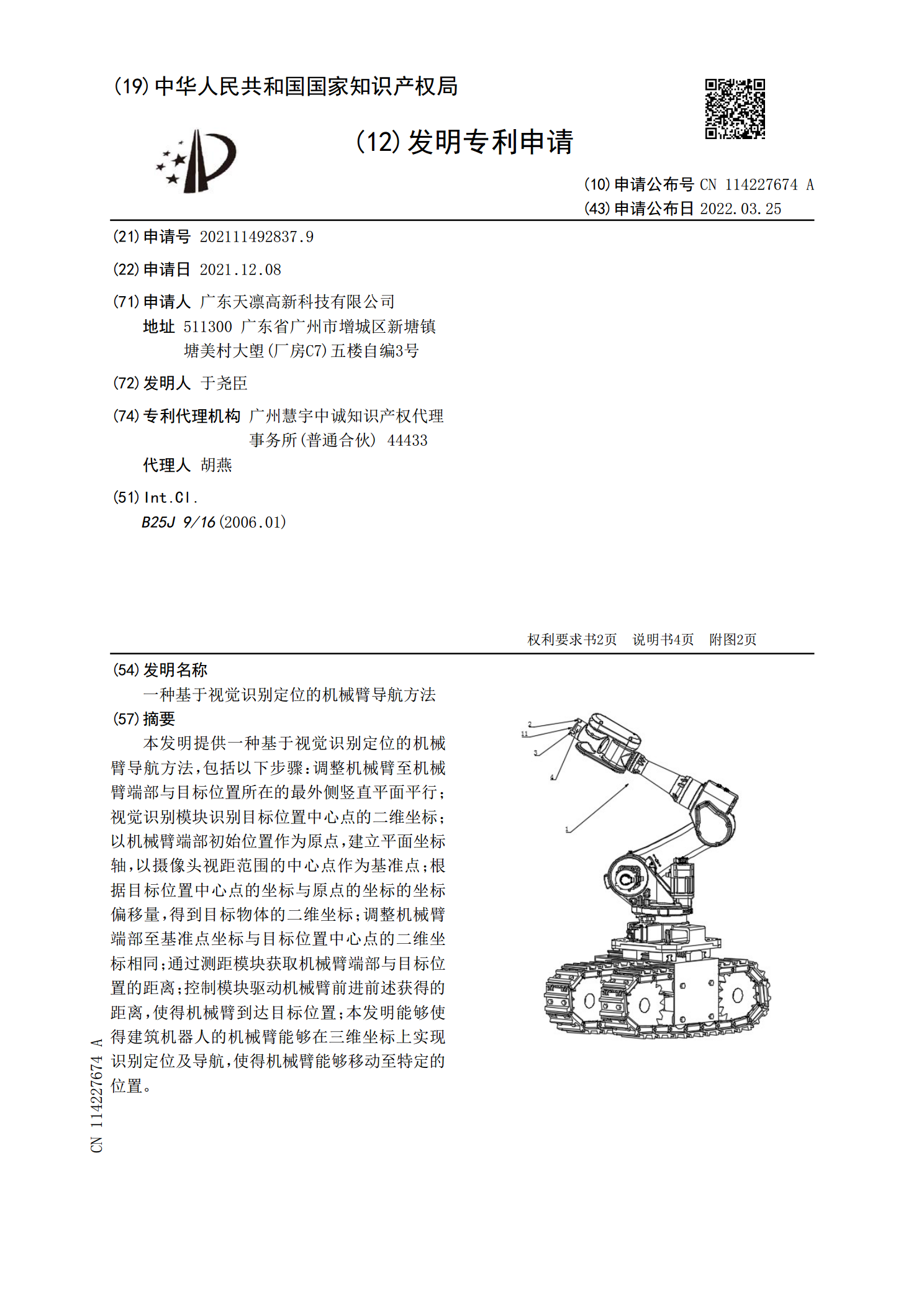
本发明提供一种基于视觉识别定位的机械臂导航方法,包括以下步骤:调整机械臂至机械臂端部与目标位置所在的最外侧竖直平面平行;视觉识别模块识别目标位置中心点的二维坐标;以机械臂端部初始位置作为原点,建立平面坐标轴,以摄像头视距范围的中心点作为基准点;根据目标位置中心点的坐标与原点的坐标的坐标偏移量,得到目标物体的二维坐标;调整机械臂端部至基准点坐标与目标位置中心点的二维坐标相同;通过测距模块获取机械臂端部与目标位置的距离;控制模块驱动机械臂前进前述获得的距离,使得机械臂到达目标位置;本发明能够使得建筑机器人的机
基于AI图像识别算法的机械臂移动的控制方法.pdf
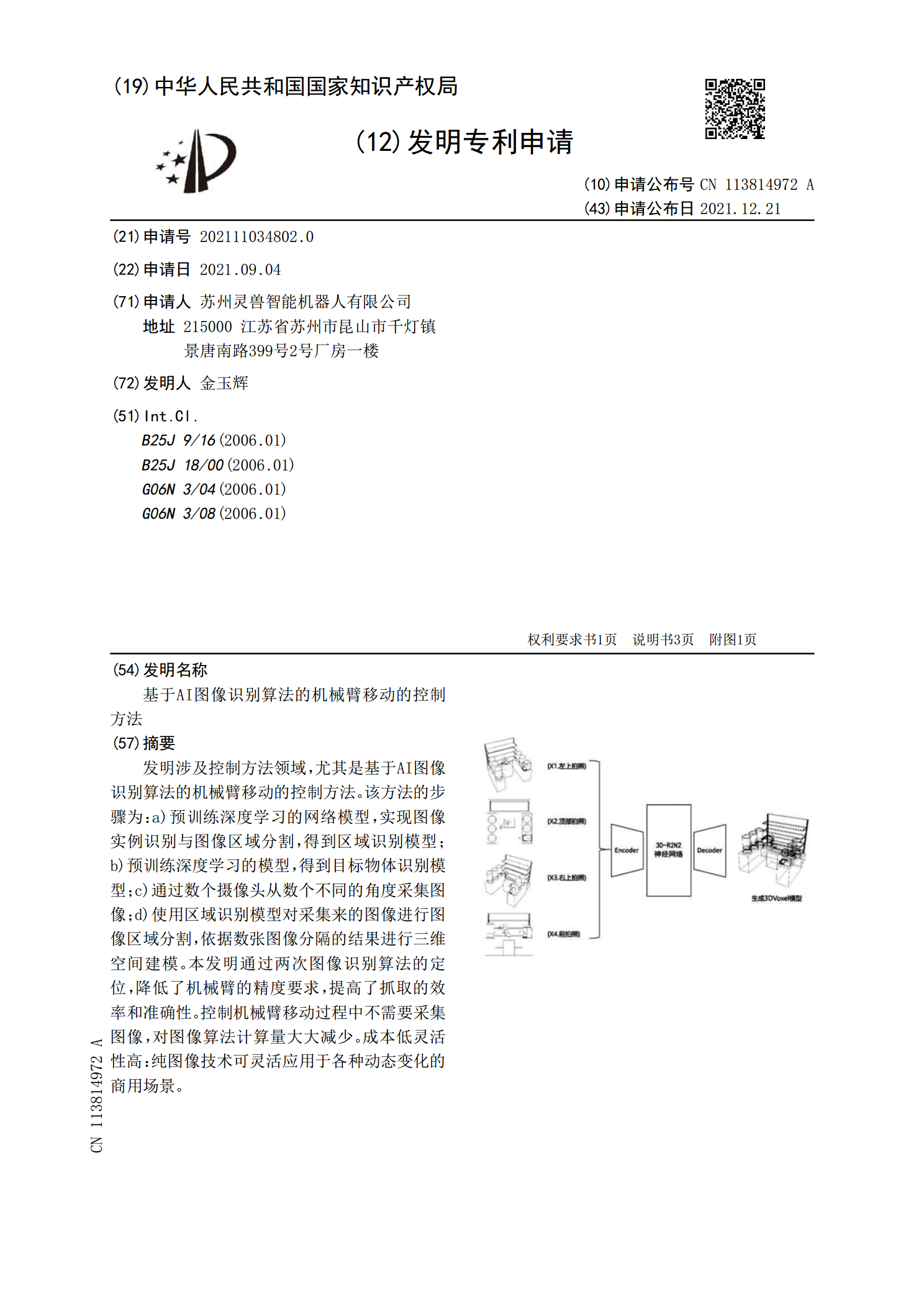
发明涉及控制方法领域,尤其是基于AI图像识别算法的机械臂移动的控制方法。该方法的步骤为:a)预训练深度学习的网络模型,实现图像实例识别与图像区域分割,得到区域识别模型;b)预训练深度学习的模型,得到目标物体识别模型;c)通过数个摄像头从数个不同的角度采集图像;d)使用区域识别模型对采集来的图像进行图像区域分割,依据数张图像分隔的结果进行三维空间建模。本发明通过两次图像识别算法的定位,降低了机械臂的精度要求,提高了抓取的效率和准确性。控制机械臂移动过程中不需要采集图像,对图像算法计算量大大减少。成本低灵活性
一种基于双目视觉的机械臂抓取控制方法.pdf
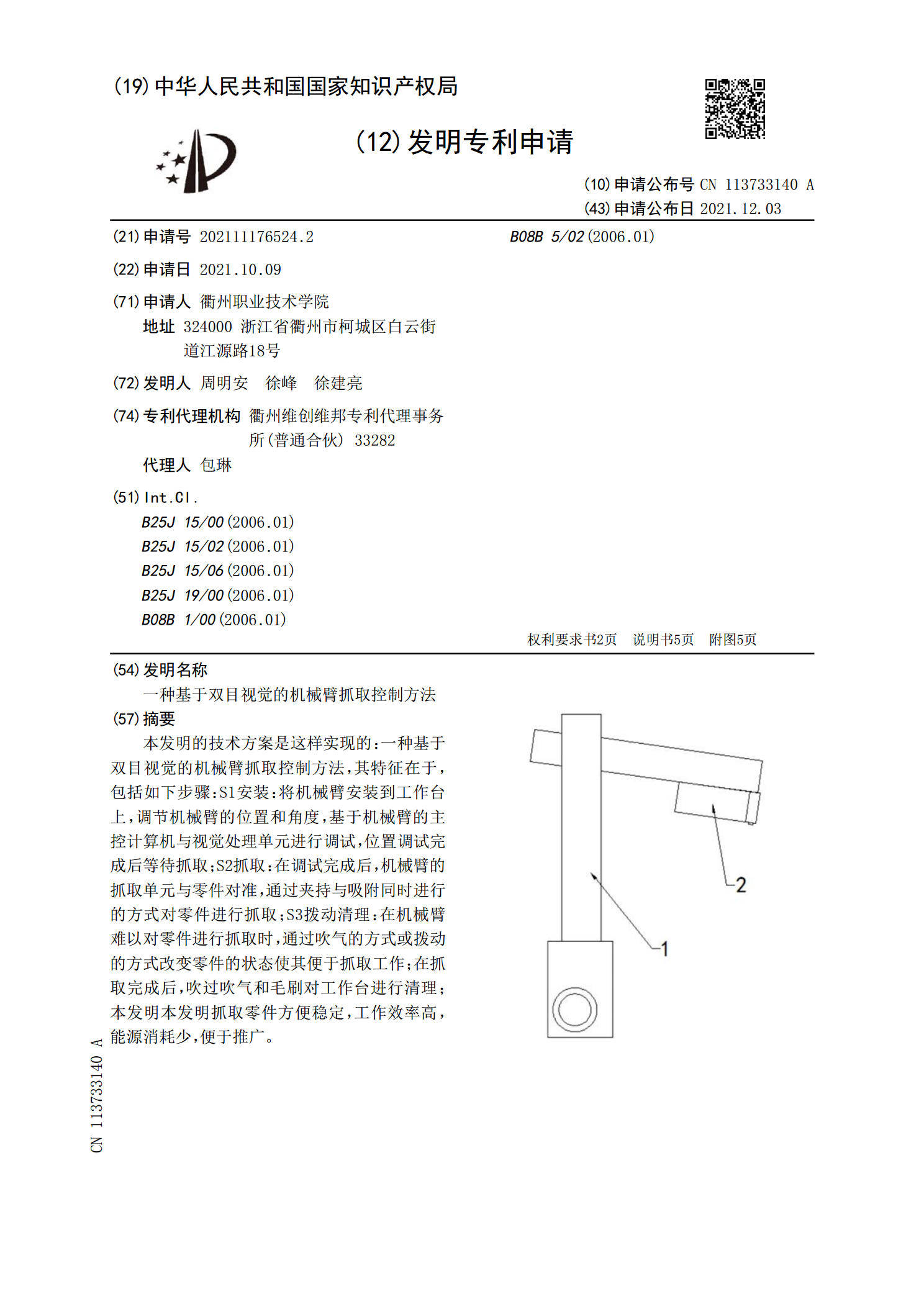
本发明的技术方案是这样实现的:一种基于双目视觉的机械臂抓取控制方法,其特征在于,包括如下步骤:S1安装:将机械臂安装到工作台上,调节机械臂的位置和角度,基于机械臂的主控计算机与视觉处理单元进行调试,位置调试完成后等待抓取;S2抓取:在调试完成后,机械臂的抓取单元与零件对准,通过夹持与吸附同时进行的方式对零件进行抓取;S3拨动清理:在机械臂难以对零件进行抓取时,通过吹气的方式或拨动的方式改变零件的状态使其便于抓取工作;在抓取完成后,吹过吹气和毛刷对工作台进行清理;本发明本发明抓取零件方便稳定,工作效率高,能
一种基于视觉识别实现机械臂精准挑拣的方法及系统.pdf
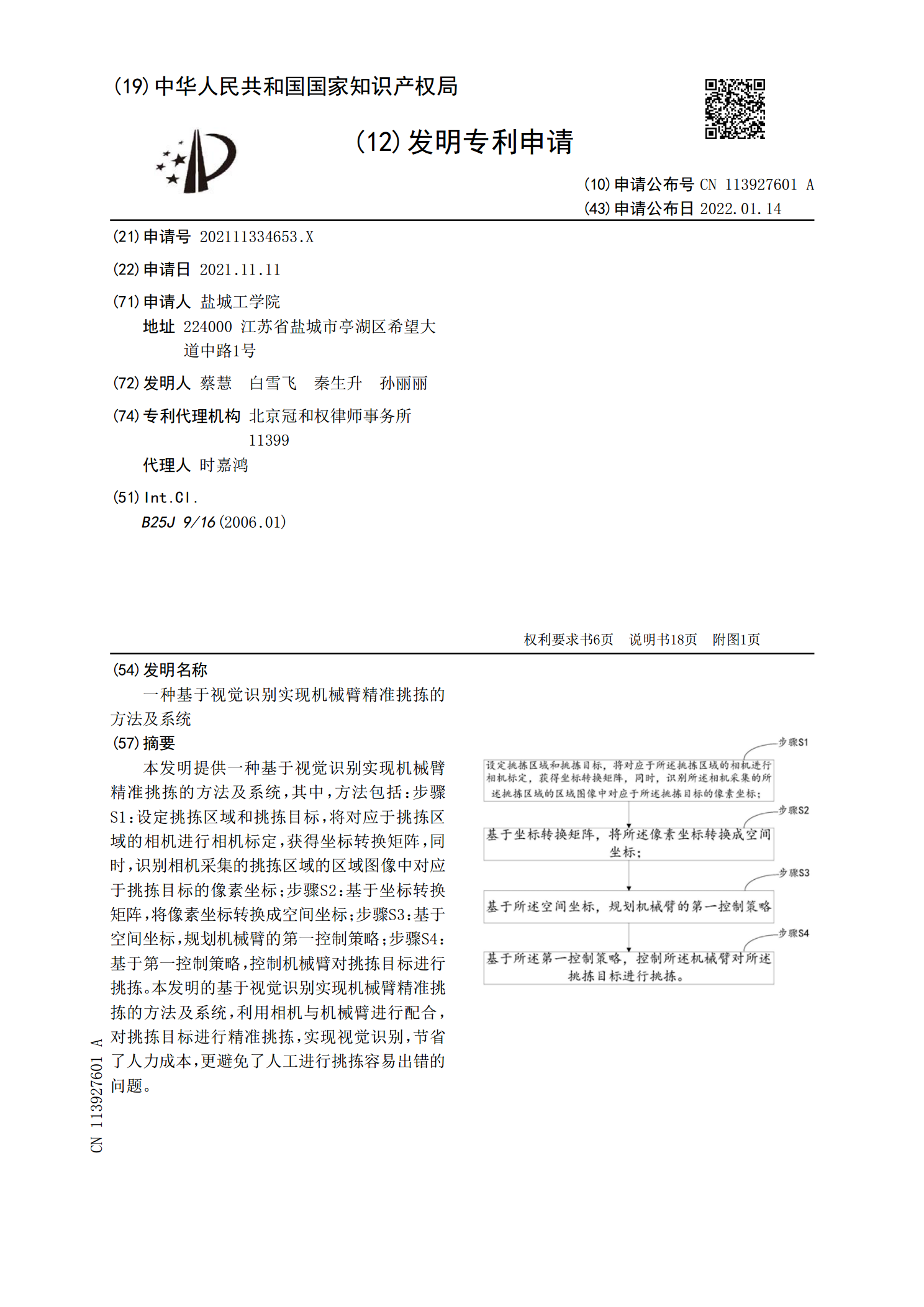
本发明提供一种基于视觉识别实现机械臂精准挑拣的方法及系统,其中,方法包括:步骤S1:设定挑拣区域和挑拣目标,将对应于挑拣区域的相机进行相机标定,获得坐标转换矩阵,同时,识别相机采集的挑拣区域的区域图像中对应于挑拣目标的像素坐标;步骤S2:基于坐标转换矩阵,将像素坐标转换成空间坐标;步骤S3:基于空间坐标,规划机械臂的第一控制策略;步骤S4:基于第一控制策略,控制机械臂对挑拣目标进行挑拣。本发明的基于视觉识别实现机械臂精准挑拣的方法及系统,利用相机与机械臂进行配合,对挑拣目标进行精准挑拣,实现视觉识别,节省