
基于AI图像识别算法的机械臂移动的控制方法.pdf

一吃****新冬


1/6

2/6
3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于AI图像识别算法的机械臂移动的控制方法.pdf
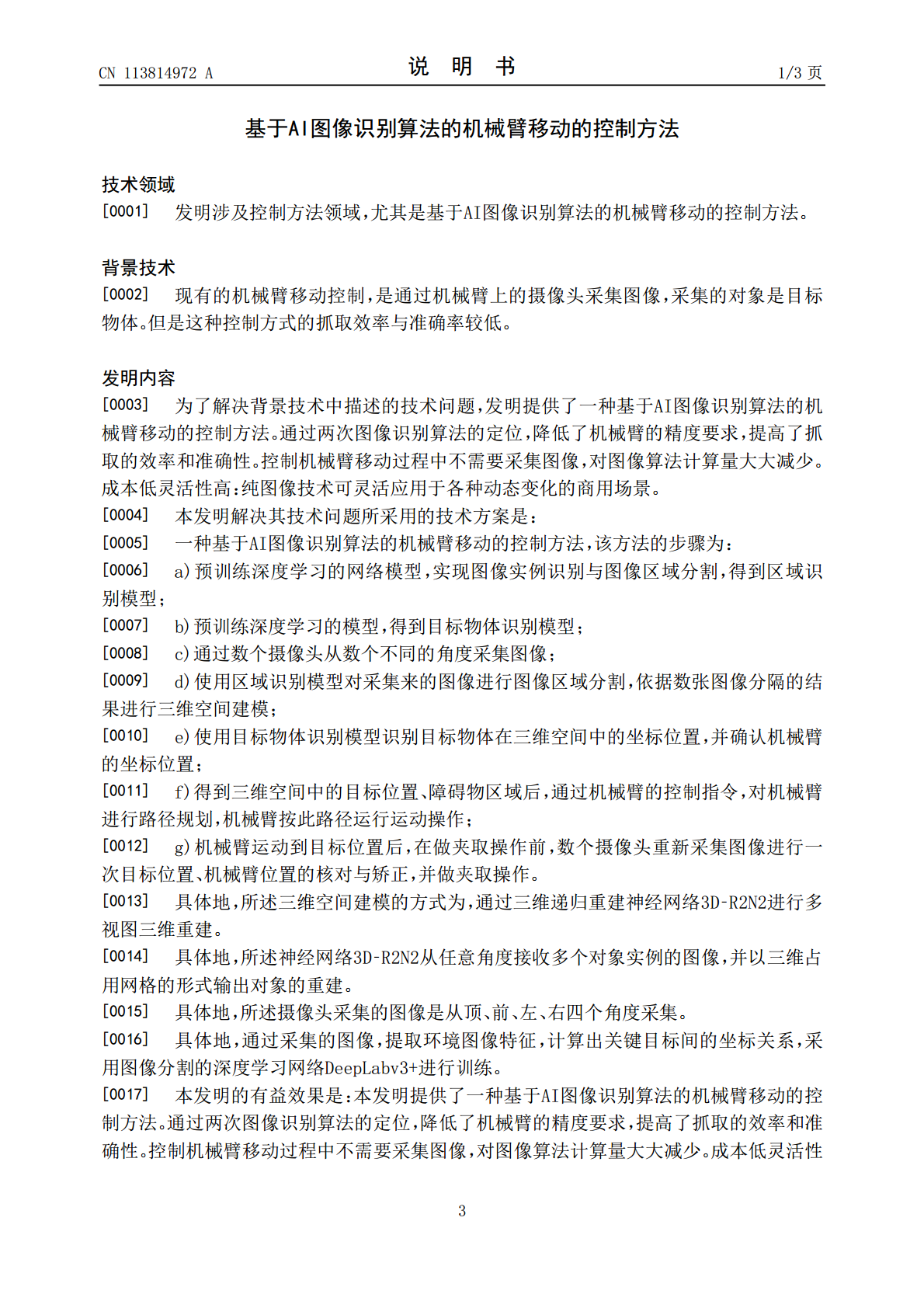
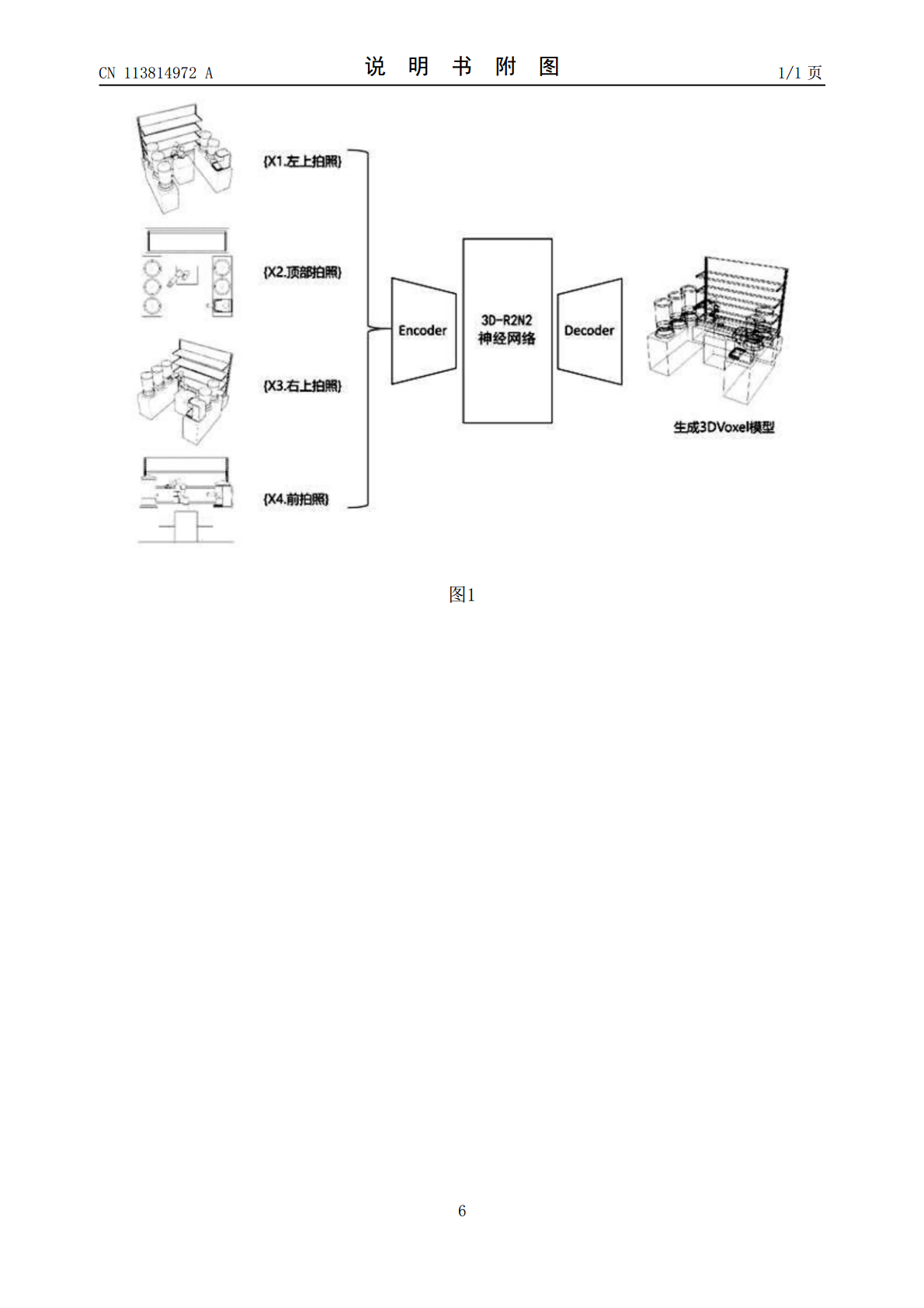
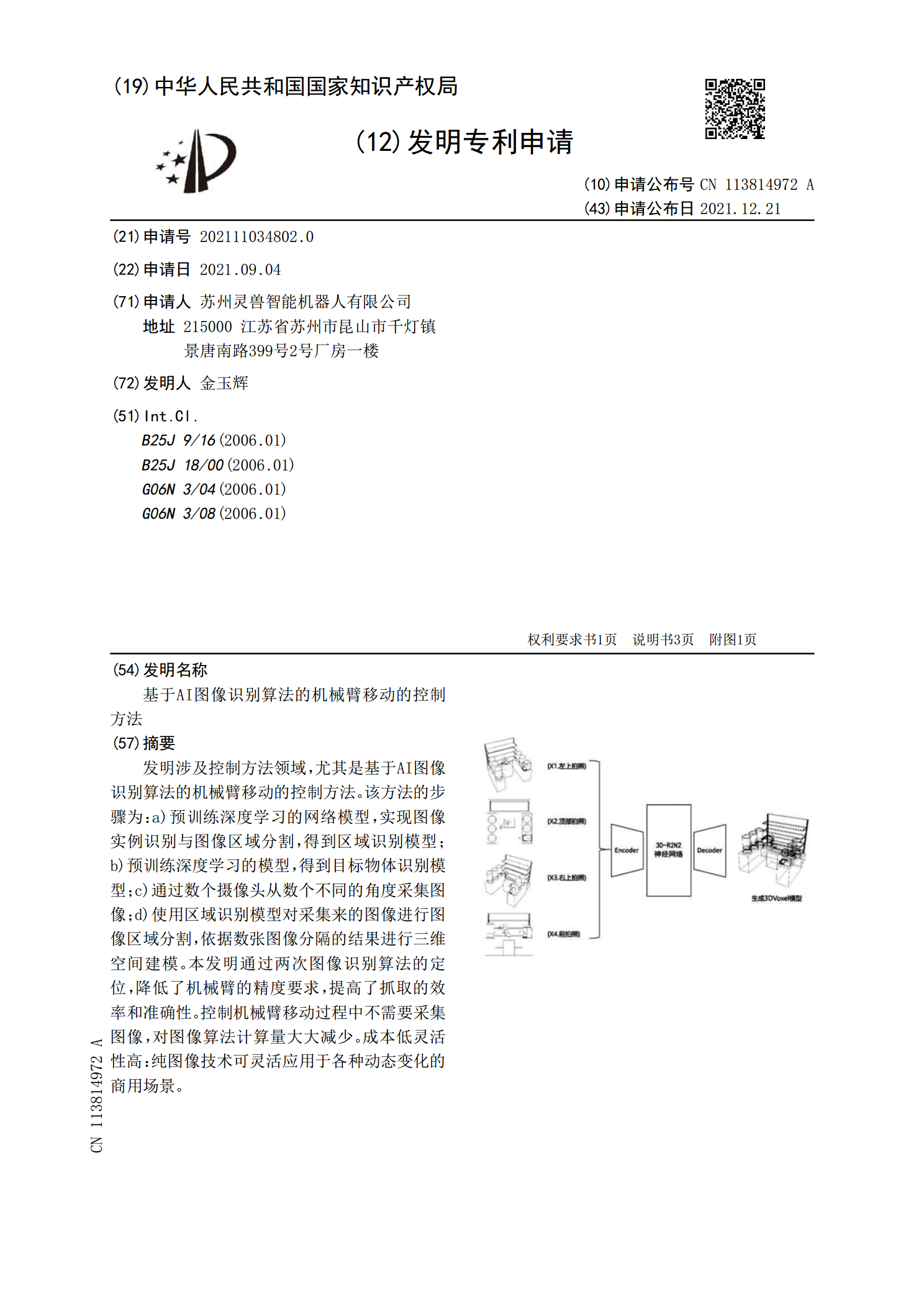
发明涉及控制方法领域,尤其是基于AI图像识别算法的机械臂移动的控制方法。该方法的步骤为:a)预训练深度学习的网络模型,实现图像实例识别与图像区域分割,得到区域识别模型;b)预训练深度学习的模型,得到目标物体识别模型;c)通过数个摄像头从数个不同的角度采集图像;d)使用区域识别模型对采集来的图像进行图像区域分割,依据数张图像分隔的结果进行三维空间建模。本发明通过两次图像识别算法的定位,降低了机械臂的精度要求,提高了抓取的效率和准确性。控制机械臂移动过程中不需要采集图像,对图像算法计算量大大减少。成本低灵活性

基于SAC算法的机械臂控制方法与分析.docx
基于SAC算法的机械臂控制方法与分析基于SAC算法的机械臂控制方法与分析摘要:随着机械臂技术的发展,机械臂在工业自动化、服务机器人和医疗护理等领域得到了广泛应用。机械臂控制是机械臂技术中的核心问题之一,是保证机械臂能够准确、高效地执行任务的关键。本论文以机械臂控制为研究对象,采用SAC(SoftActor-Critic)算法进行控制,并分析了该方法的优势和不足之处。关键词:机械臂控制;SAC算法;任务执行;优点;不足1.引言机械臂是一种能够完成空间运动任务的机械装置,具有广泛的应用前景。机械臂控制是指通过
基于改进RRT算法的移动机械臂路径规划.pptx
汇报人:CONTENTS添加章节标题RRT算法简介RRT算法的基本原理RRT算法的应用领域RRT算法的优缺点改进RRT算法的提出改进RRT算法的背景和意义改进RRT算法的目标和实现方式改进RRT算法的优势和局限性改进RRT算法的实现过程改进RRT算法的数学模型改进RRT算法的算法流程改进RRT算法的关键技术实现移动机械臂路径规划的应用移动机械臂路径规划的概述移动机械臂路径规划的实现方法移动机械臂路径规划的优缺点和适用场景改进RRT算法在移动机械臂路径规划中的应用效果实验环境和实验方法介绍实验结果分析和比较

基于迭代滑模算法的机械臂控制.docx
基于迭代滑模算法的机械臂控制基于迭代滑模算法的机械臂控制摘要:机械臂在工业生产中起着重要的作用。针对机械臂的精确控制问题,本文提出了一种基于迭代滑模算法的控制方法。该方法通过引入滑模函数和滑模控制器,实现了对机械臂的精确控制,提高了系统的稳定性和性能。通过仿真实验的验证,结果表明所提出的方法具有较好的控制效果和鲁棒性,可有效应用于机械臂控制系统中。关键词:机械臂控制迭代滑模精确控制系统稳定性鲁棒性1.引言机械臂是一种能够模拟并替代人类手臂的工具,广泛应用于工业生产线和特定环境下的危险操作。机械臂的精确控制

基于死区补偿的码垛机械臂控制算法.docx
基于死区补偿的码垛机械臂控制算法基于死区补偿的码垛机械臂控制算法摘要:码垛机械臂是一种常用于物流业中的自动化设备,用于将物体从一个位置堆叠到另一个位置。然而,由于机械臂本身和外部环境的因素,存在一定的死区问题,导致机械臂的运动控制不够准确。为了解决这个问题,本文提出了一种基于死区补偿的码垛机械臂控制算法。该算法通过对死区进行建模,并根据建模结果进行补偿,可以更精确地控制机械臂的运动,提高码垛的准确性和效率。实验结果表明,该算法能够有效地解决死区问题,并显著提升机械臂的控制性能。关键词:码垛机械臂,死区补偿