
一种欠驱动膝关节外骨骼机器人.pdf

文光****iu

1/10

2/10
3/10

4/10
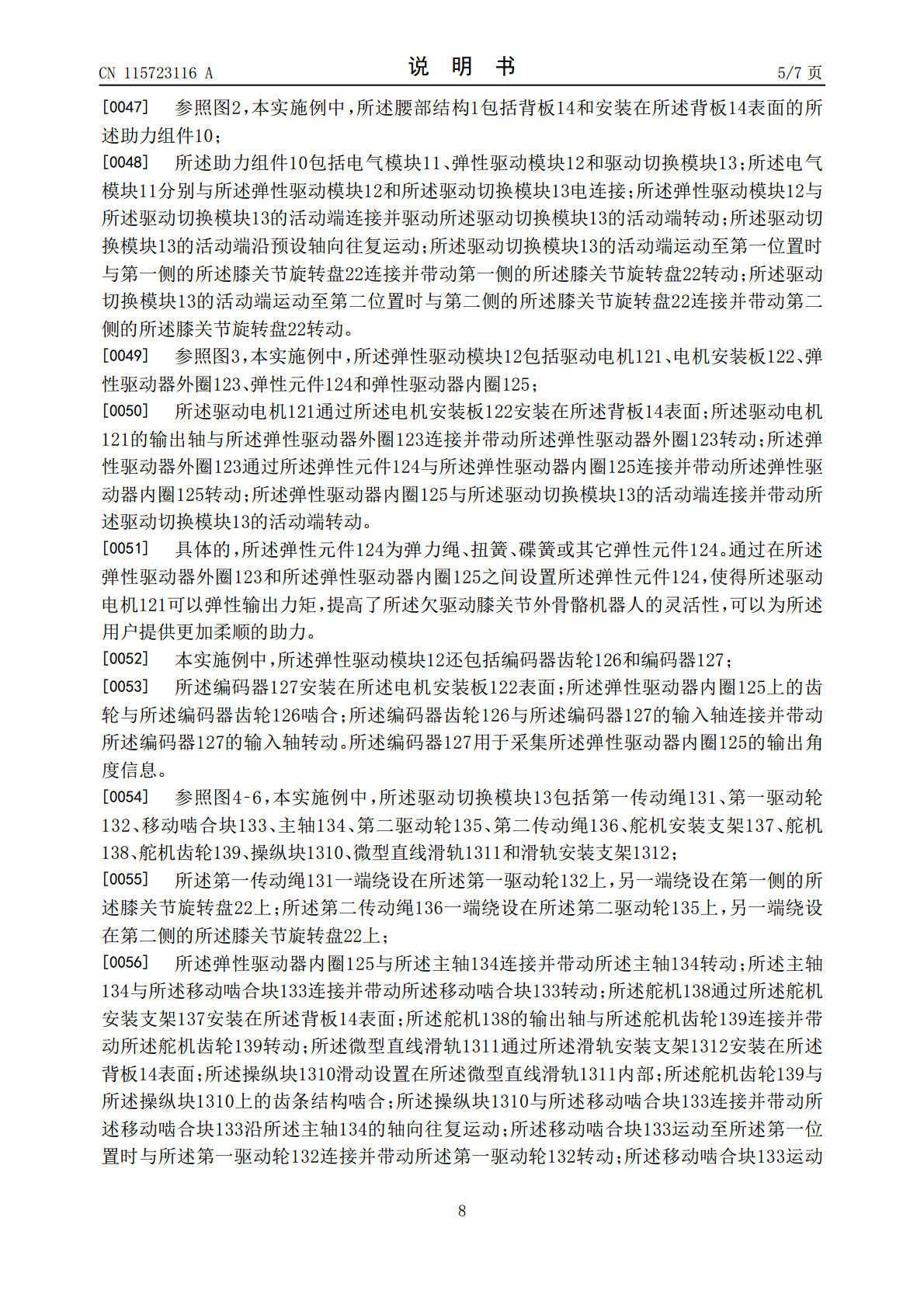
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种欠驱动膝关节外骨骼机器人.pdf
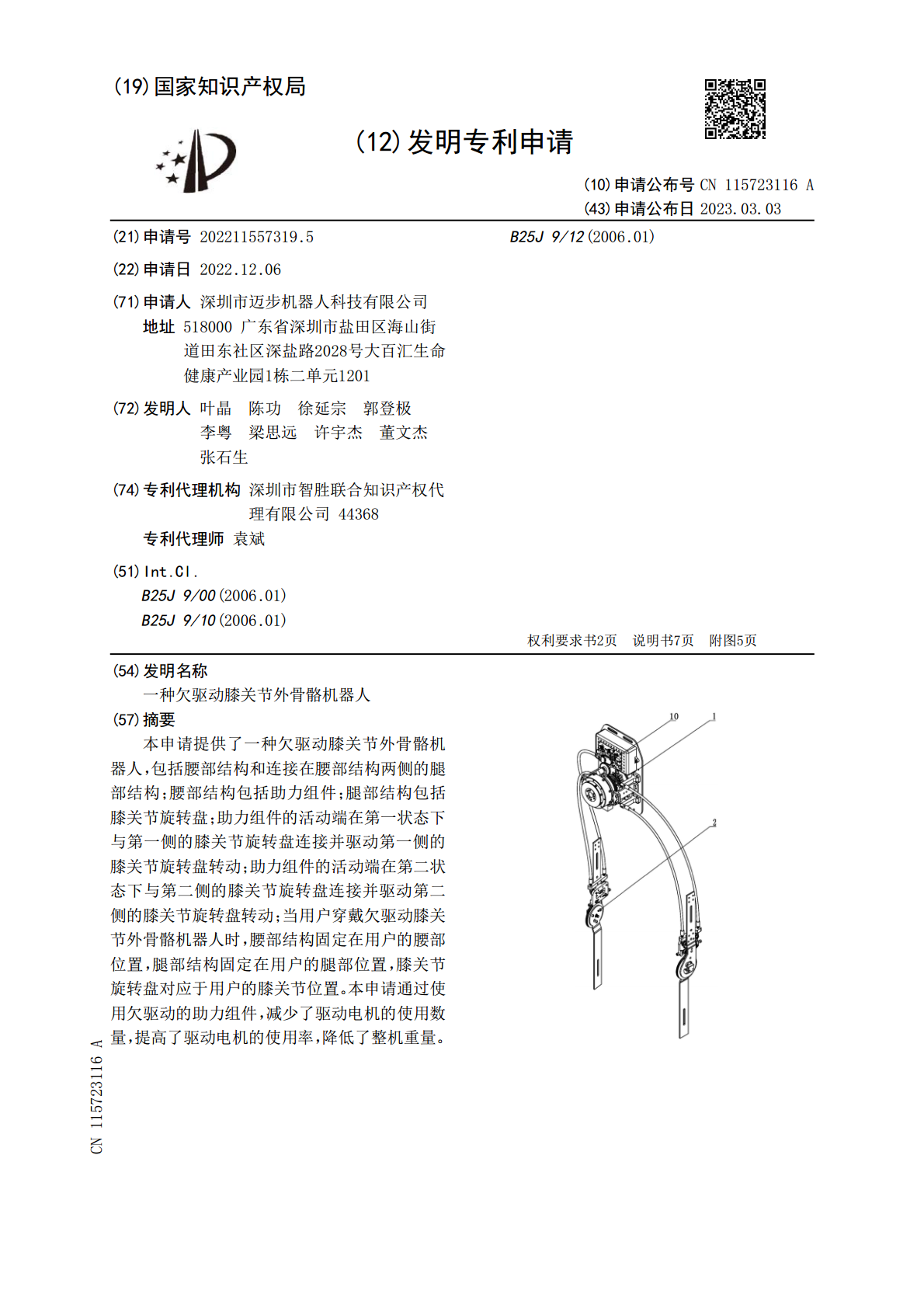
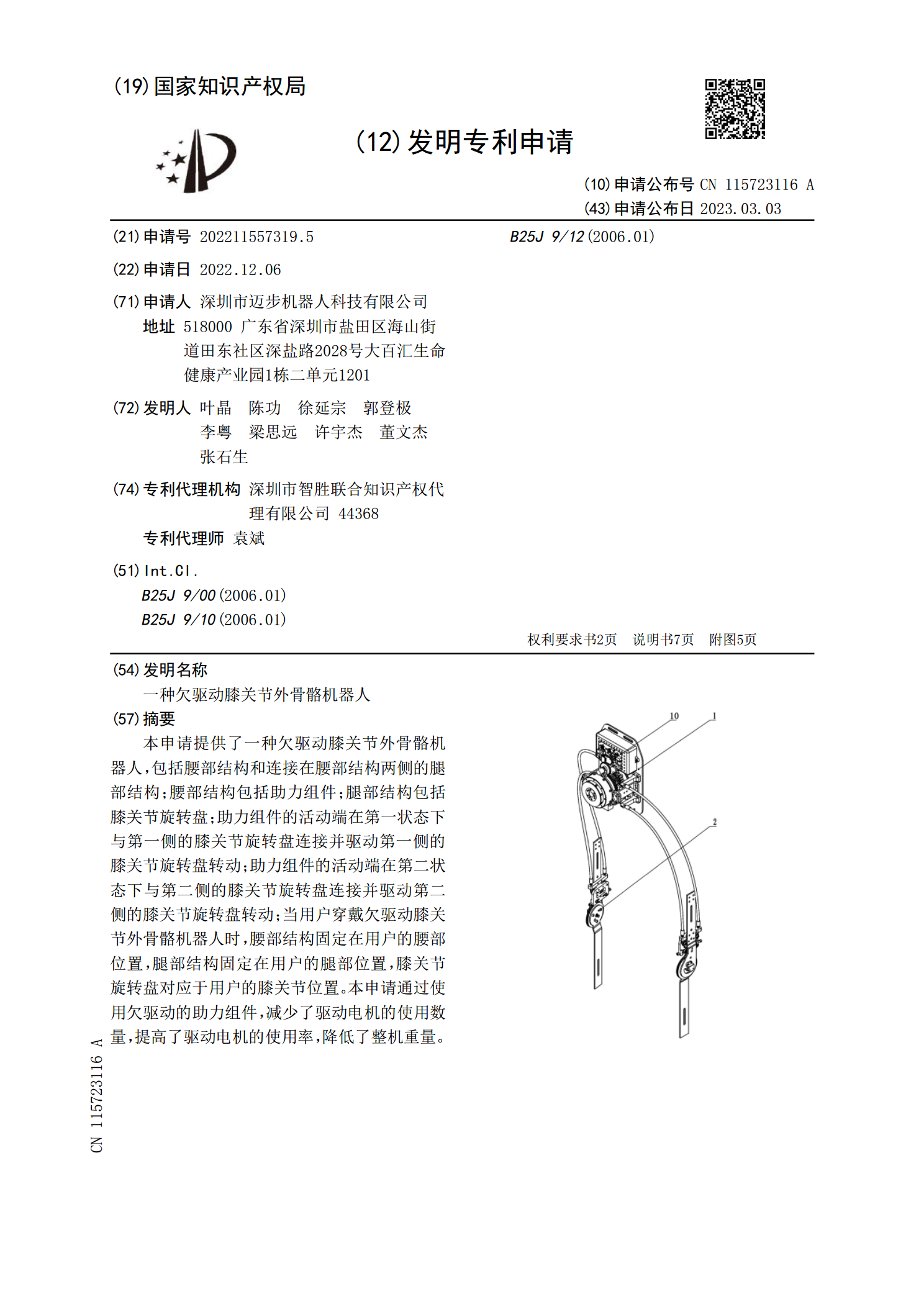
本申请提供了一种欠驱动膝关节外骨骼机器人,包括腰部结构和连接在腰部结构两侧的腿部结构;腰部结构包括助力组件;腿部结构包括膝关节旋转盘;助力组件的活动端在第一状态下与第一侧的膝关节旋转盘连接并驱动第一侧的膝关节旋转盘转动;助力组件的活动端在第二状态下与第二侧的膝关节旋转盘连接并驱动第二侧的膝关节旋转盘转动;当用户穿戴欠驱动膝关节外骨骼机器人时,腰部结构固定在用户的腰部位置,腿部结构固定在用户的腿部位置,膝关节旋转盘对应于用户的膝关节位置。本申请通过使用欠驱动的助力组件,减少了驱动电机的使用数量,提高了驱动电
膝关节弹性驱动装置及外骨骼机器人.pdf
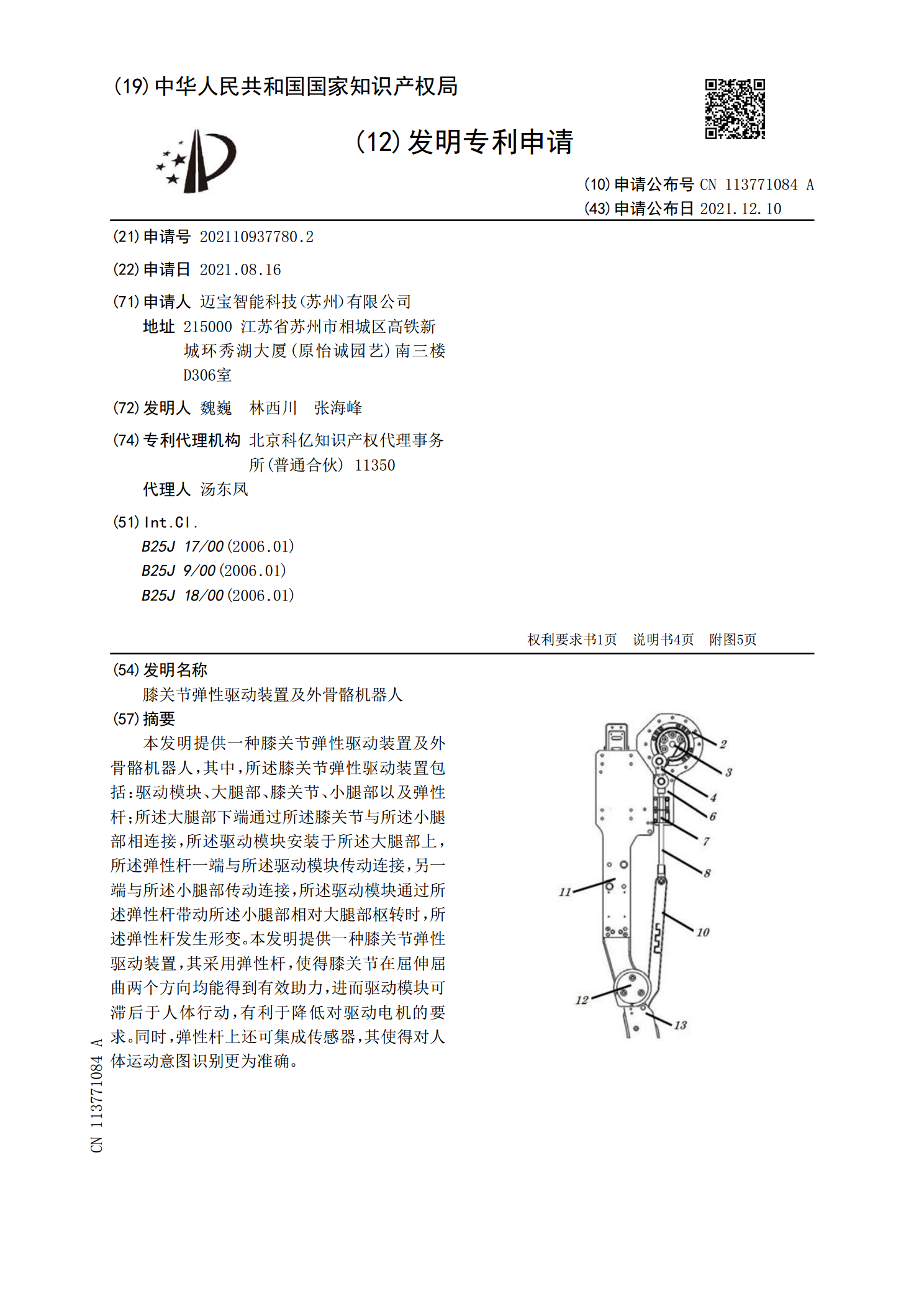
本发明提供一种膝关节弹性驱动装置及外骨骼机器人,其中,所述膝关节弹性驱动装置包括:驱动模块、大腿部、膝关节、小腿部以及弹性杆;所述大腿部下端通过所述膝关节与所述小腿部相连接,所述驱动模块安装于所述大腿部上,所述弹性杆一端与所述驱动模块传动连接,另一端与所述小腿部传动连接,所述驱动模块通过所述弹性杆带动所述小腿部相对大腿部枢转时,所述弹性杆发生形变。本发明提供一种膝关节弹性驱动装置,其采用弹性杆,使得膝关节在屈伸屈曲两个方向均能得到有效助力,进而驱动模块可滞后于人体行动,有利于降低对驱动电机的要求。同时,弹
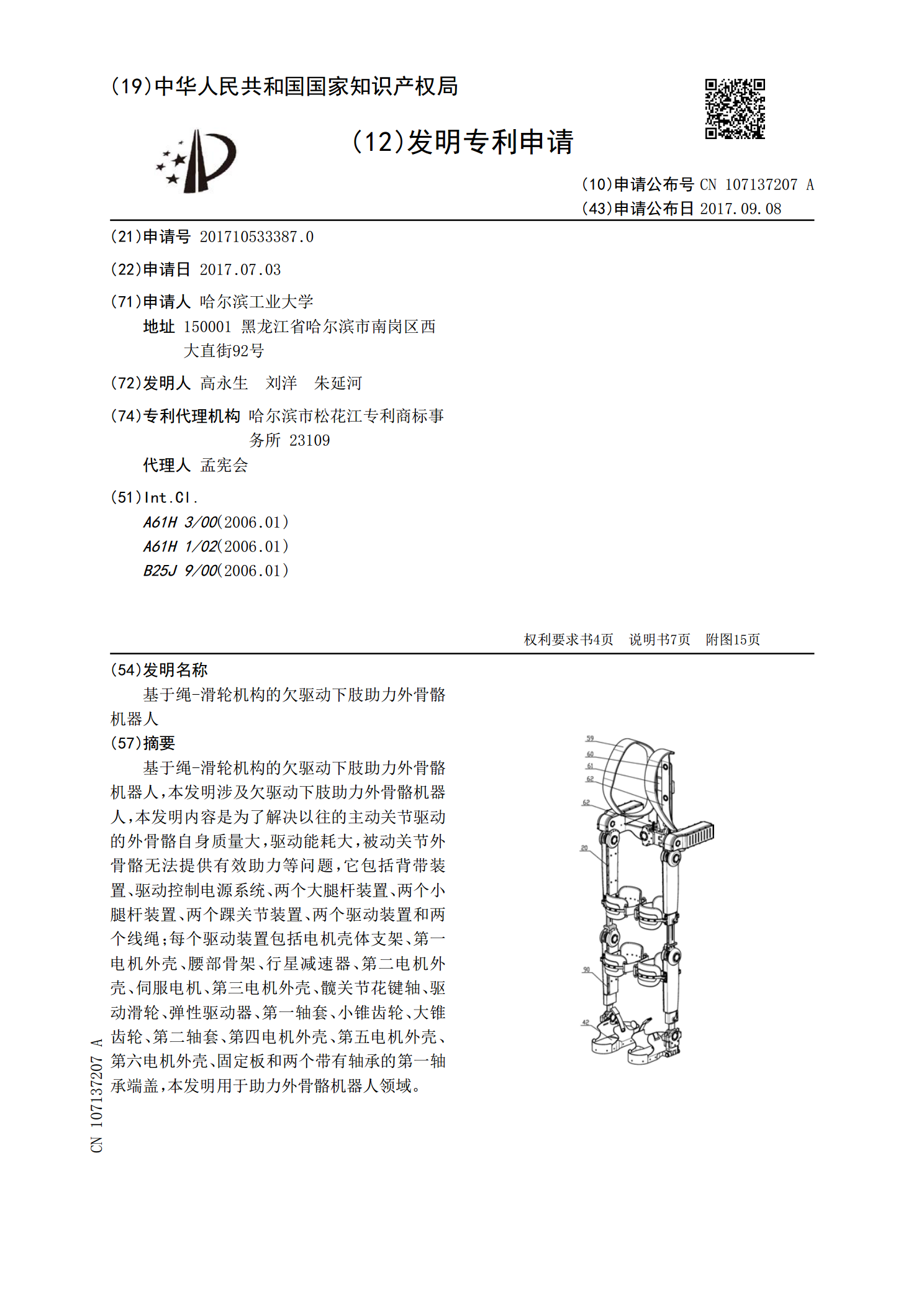
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人.pdf
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人,本发明涉及欠驱动下肢助力外骨骼机器人,本发明内容是为了解决以往的主动关节驱动的外骨骼自身质量大,驱动能耗大,被动关节外骨骼无法提供有效助力等问题,它包括背带装置、驱动控制电源系统、两个大腿杆装置、两个小腿杆装置、两个踝关节装置、两个驱动装置和两个线绳;每个驱动装置包括电机壳体支架、第一电机外壳、腰部骨架、行星减速器、第二电机外壳、伺服电机、第三电机外壳、髋关节花键轴、驱动滑轮、弹性驱动器、第一轴套、小锥齿轮、大锥齿轮、第二轴套、第四电机外壳、第五电机外壳、第六
一种气动肌肉驱动的柔性膝关节外骨骼.pdf
本申请公开了一种气动肌肉驱动的柔性膝关节外骨骼,涉及智能装备、机器人、穿戴装备领域,包括大腿固定板、小腿固定板、仿生关节、气动肌肉模块;仿生关节连接于大腿固定板和小腿固定板之间,以使大腿固定板和小腿固定板之间的瞬心轨迹与膝盖的顺心轨迹一致;气动肌肉模块包括气动肌肉、第一钢丝绳、第二钢丝绳、联动机构,气动肌肉连接于大腿固定板正对大腿正面位置,第一钢丝绳的一端连接于气动肌肉的输出端、另一端与联动机构连接,第二钢丝绳的一端与联动机构连接、另一端与小腿固定板连接,气动肌肉用于驱动第一钢丝绳运动来驱动联动机构运动、
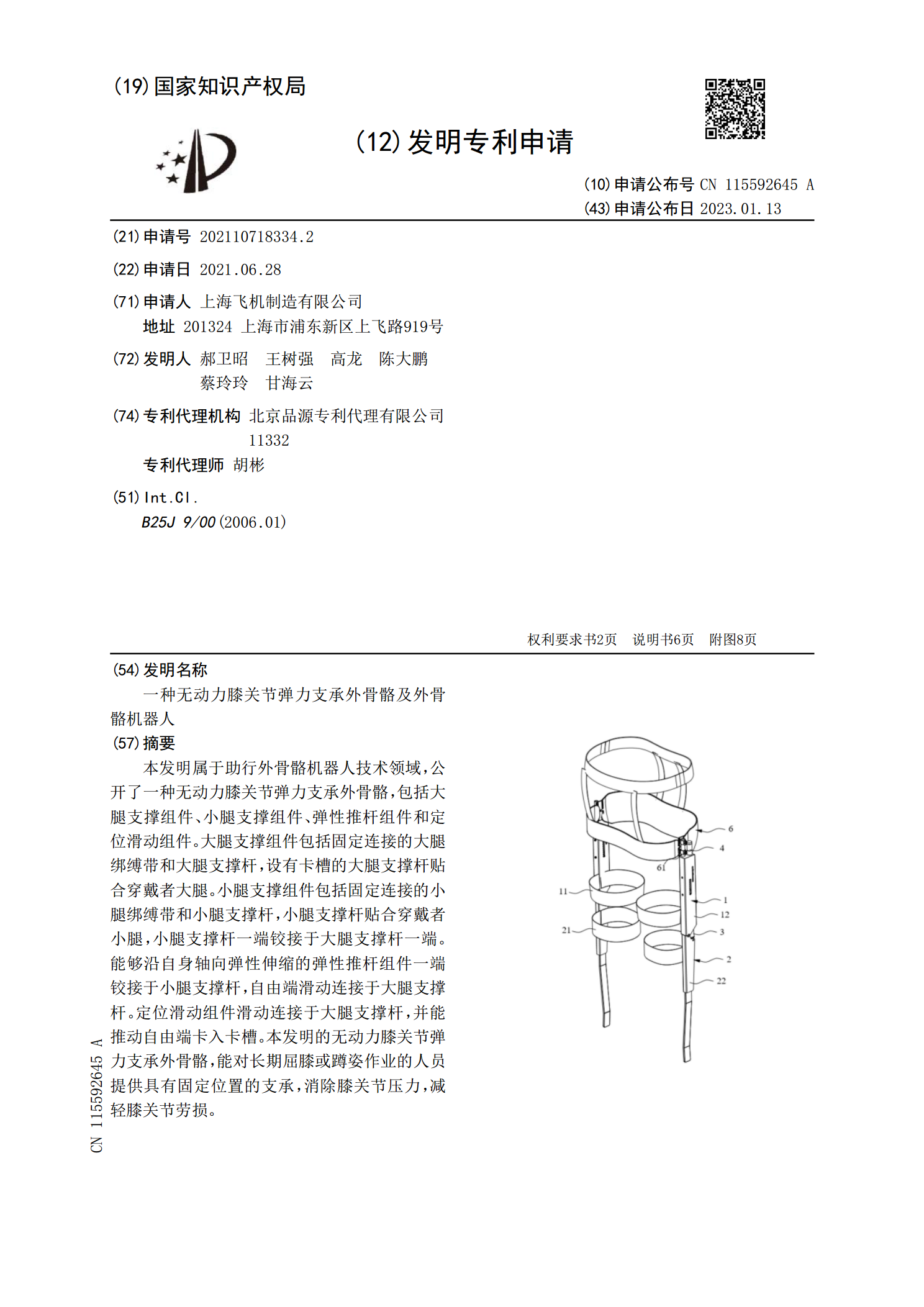
一种无动力膝关节弹力支承外骨骼及外骨骼机器人.pdf
本发明属于助行外骨骼机器人技术领域,公开了一种无动力膝关节弹力支承外骨骼,包括大腿支撑组件、小腿支撑组件、弹性推杆组件和定位滑动组件。大腿支撑组件包括固定连接的大腿绑缚带和大腿支撑杆,设有卡槽的大腿支撑杆贴合穿戴者大腿。小腿支撑组件包括固定连接的小腿绑缚带和小腿支撑杆,小腿支撑杆贴合穿戴者小腿,小腿支撑杆一端铰接于大腿支撑杆一端。能够沿自身轴向弹性伸缩的弹性推杆组件一端铰接于小腿支撑杆,自由端滑动连接于大腿支撑杆。定位滑动组件滑动连接于大腿支撑杆,并能推动自由端卡入卡槽。本发明的无动力膝关节弹力支承外骨骼