
膝关节弹性驱动装置及外骨骼机器人.pdf

又珊****ck

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
膝关节弹性驱动装置及外骨骼机器人.pdf
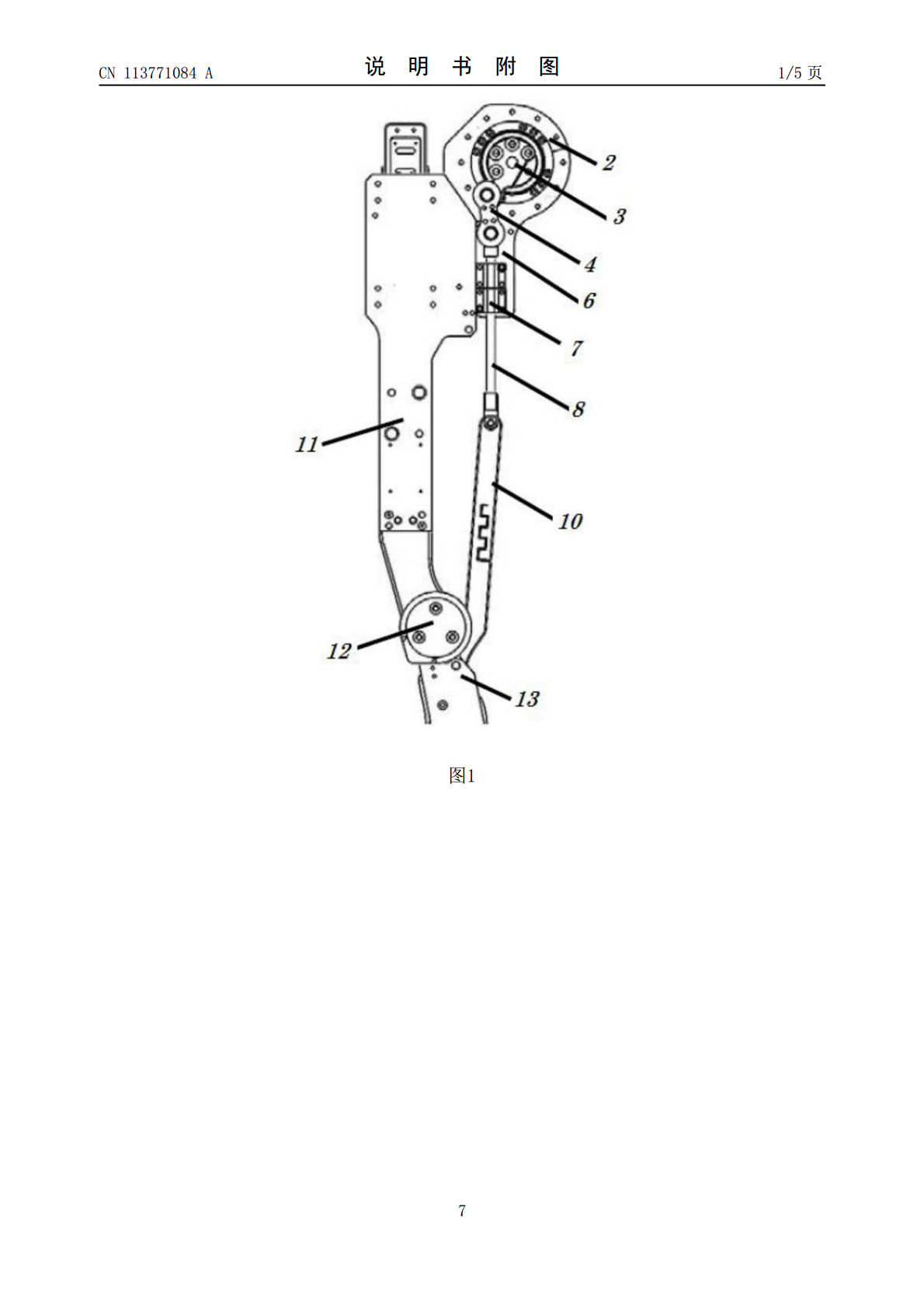
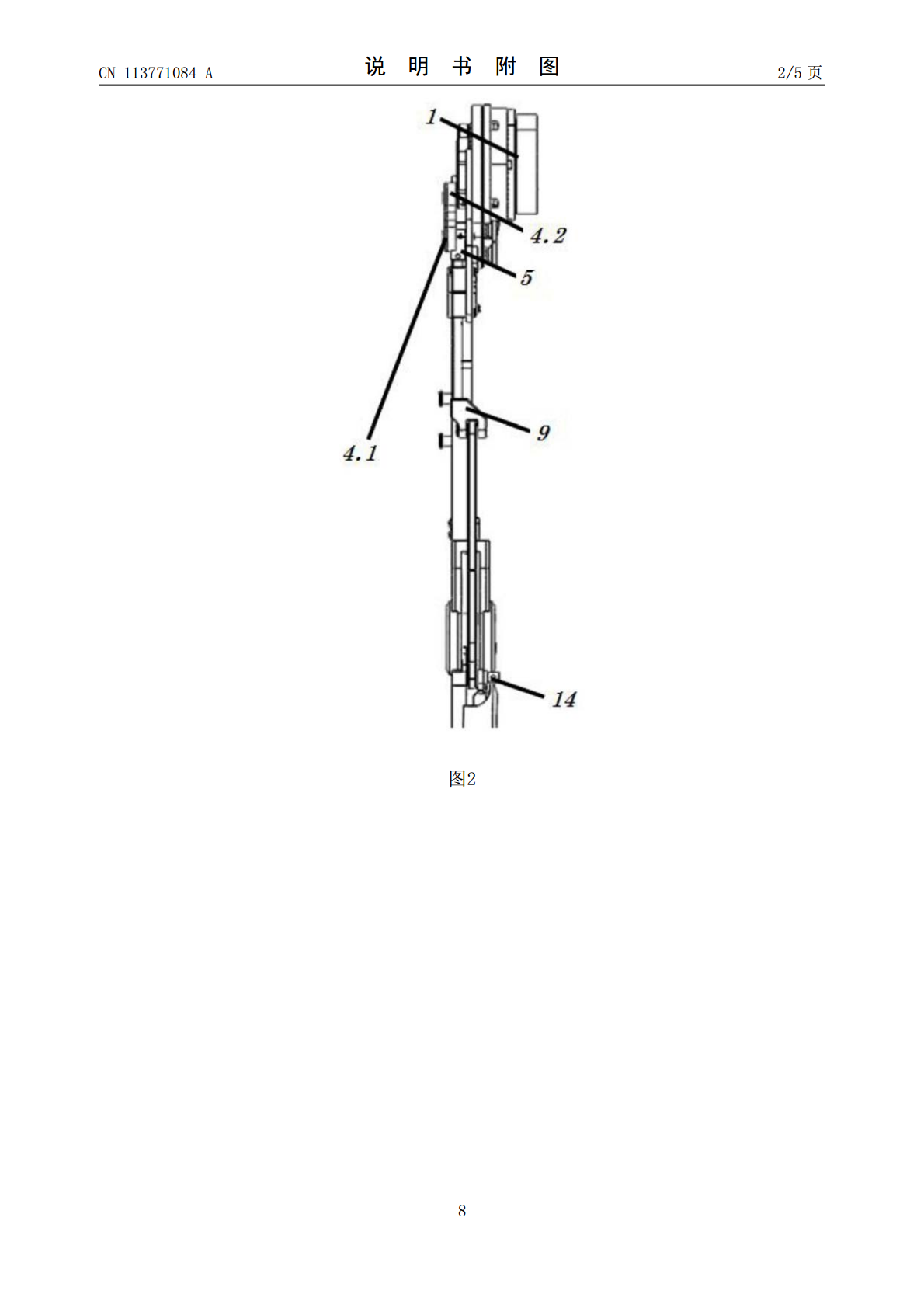
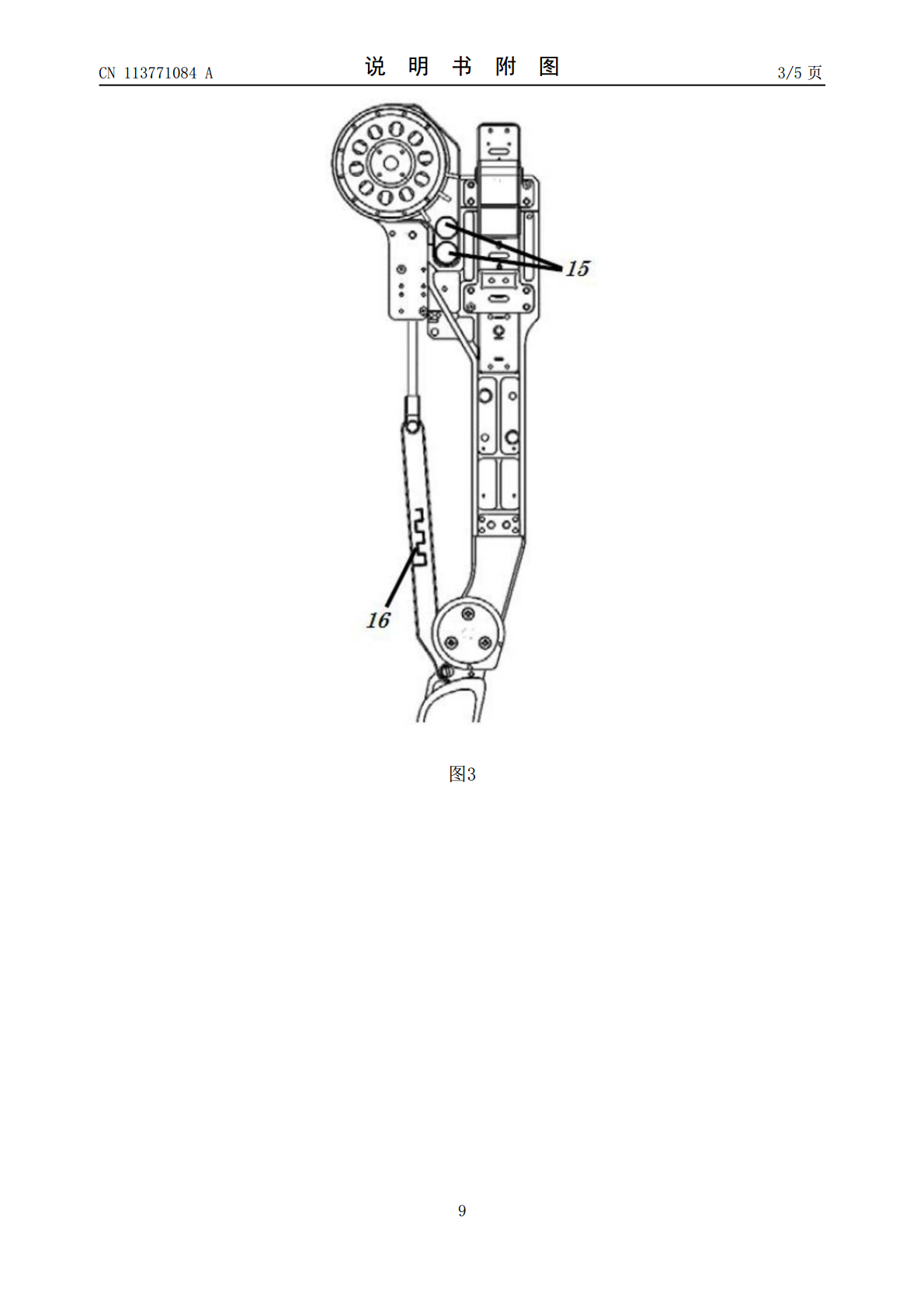
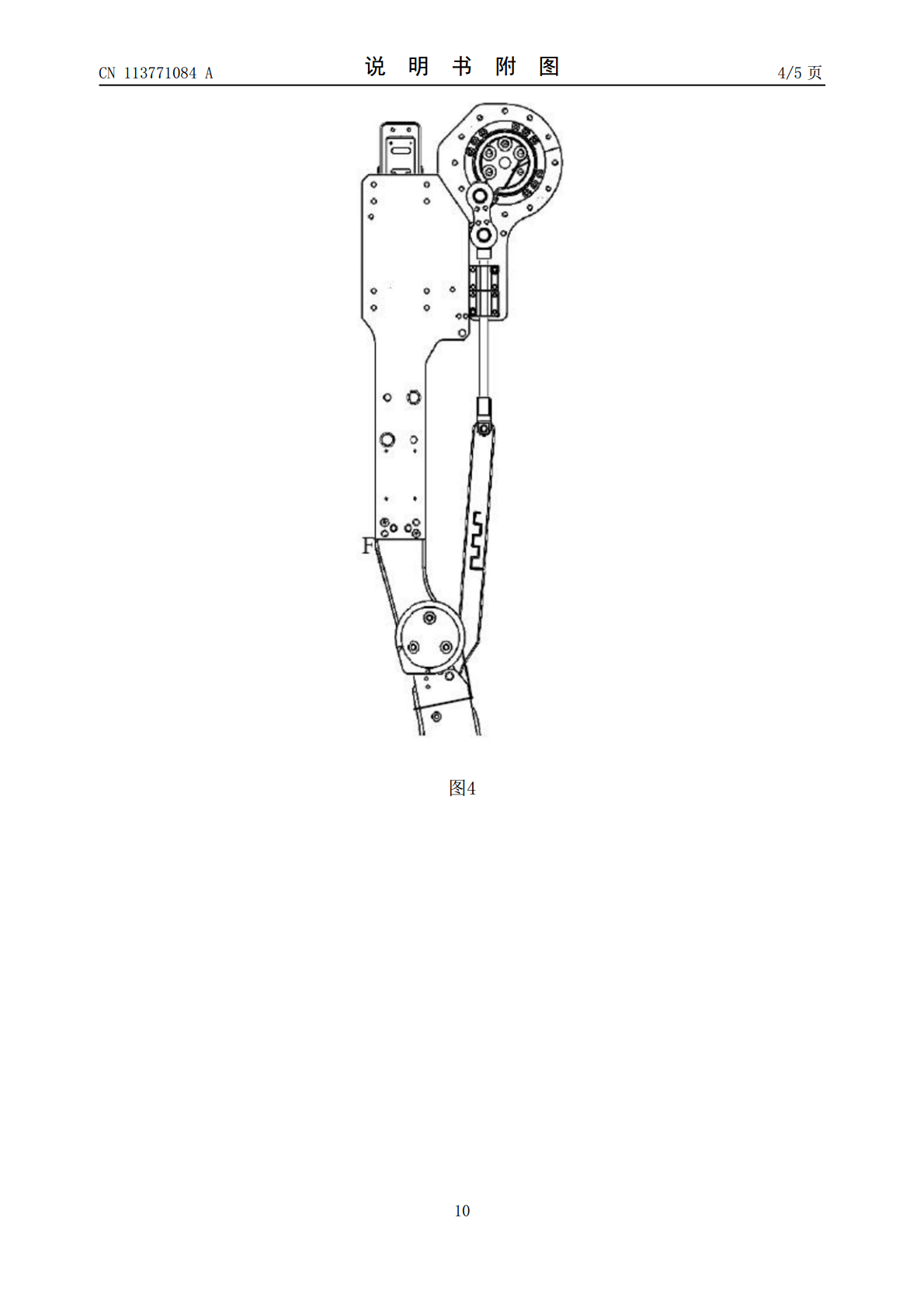
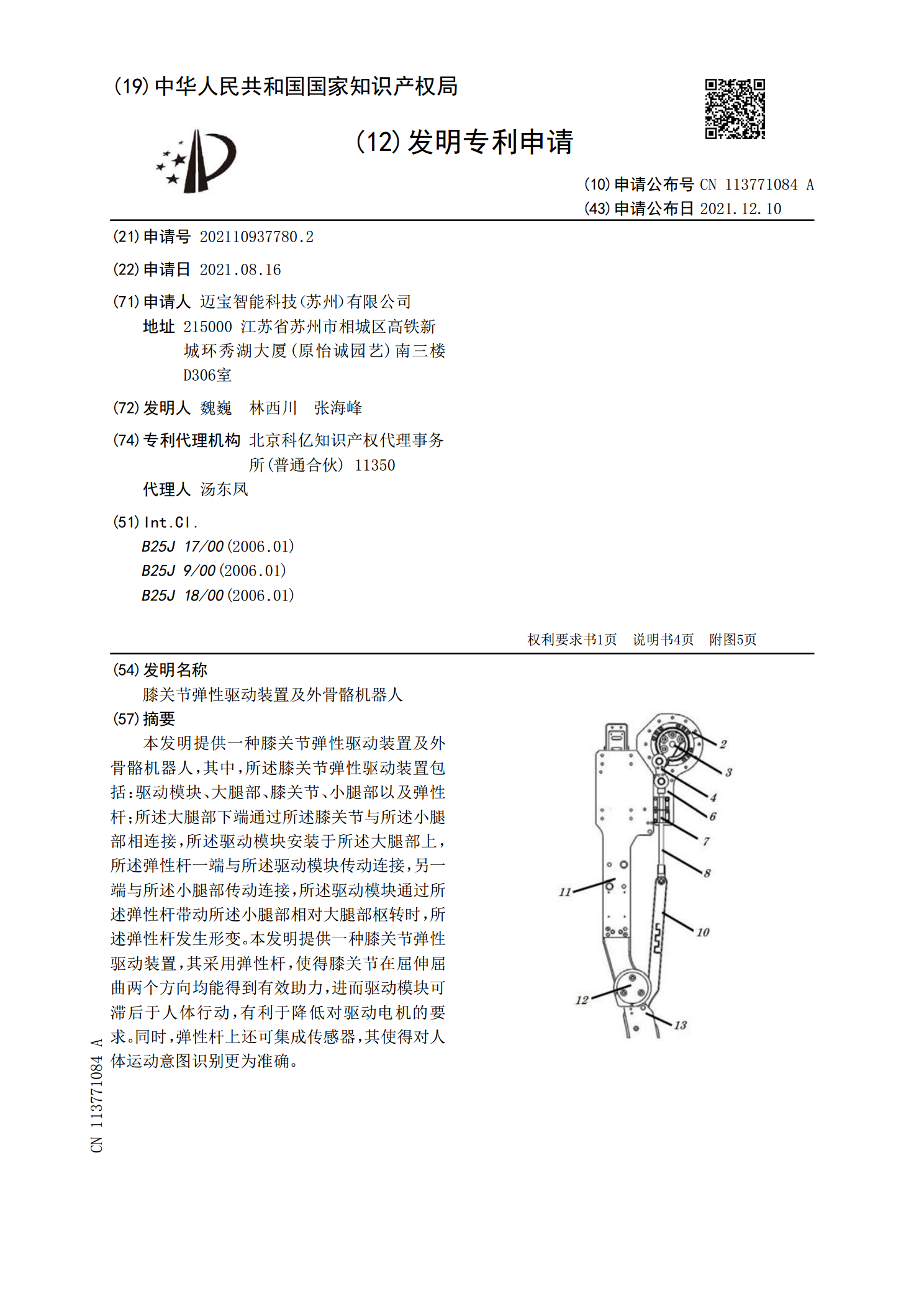
本发明提供一种膝关节弹性驱动装置及外骨骼机器人,其中,所述膝关节弹性驱动装置包括:驱动模块、大腿部、膝关节、小腿部以及弹性杆;所述大腿部下端通过所述膝关节与所述小腿部相连接,所述驱动模块安装于所述大腿部上,所述弹性杆一端与所述驱动模块传动连接,另一端与所述小腿部传动连接,所述驱动模块通过所述弹性杆带动所述小腿部相对大腿部枢转时,所述弹性杆发生形变。本发明提供一种膝关节弹性驱动装置,其采用弹性杆,使得膝关节在屈伸屈曲两个方向均能得到有效助力,进而驱动模块可滞后于人体行动,有利于降低对驱动电机的要求。同时,弹
一种欠驱动膝关节外骨骼机器人.pdf
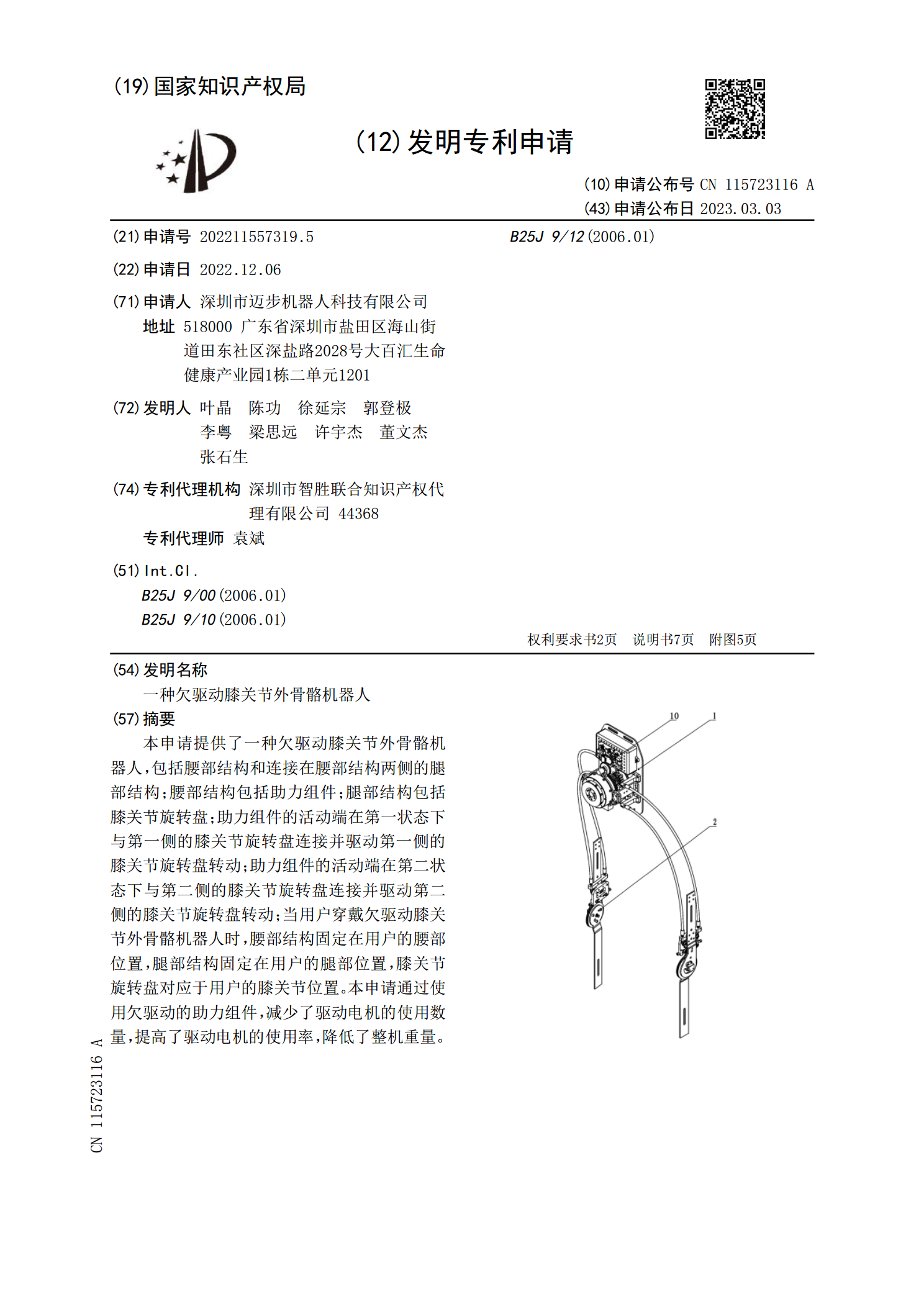
本申请提供了一种欠驱动膝关节外骨骼机器人,包括腰部结构和连接在腰部结构两侧的腿部结构;腰部结构包括助力组件;腿部结构包括膝关节旋转盘;助力组件的活动端在第一状态下与第一侧的膝关节旋转盘连接并驱动第一侧的膝关节旋转盘转动;助力组件的活动端在第二状态下与第二侧的膝关节旋转盘连接并驱动第二侧的膝关节旋转盘转动;当用户穿戴欠驱动膝关节外骨骼机器人时,腰部结构固定在用户的腰部位置,腿部结构固定在用户的腿部位置,膝关节旋转盘对应于用户的膝关节位置。本申请通过使用欠驱动的助力组件,减少了驱动电机的使用数量,提高了驱动电

基于数据驱动的膝关节外骨骼控制.docx
基于数据驱动的膝关节外骨骼控制基于数据驱动的膝关节外骨骼控制摘要:随着人口老龄化问题的日益突出,膝关节疾病越来越普遍,给患者的日常生活带来了很大的困扰。膝关节外骨骼作为一种新型的康复装备,具有帮助恢复行走功能的潜力。然而,传统的外骨骼控制方法往往过于依赖经验值,缺乏个体化和适应性。本文提出了一种基于数据驱动的膝关节外骨骼控制方法,通过利用大量的生理数据和机器学习算法,实现了个体化的、动态的外骨骼控制。实验结果显示,基于数据驱动的膝关节外骨骼控制方法在恢复行走功能方面有着良好的效果。关键词:膝关节外骨骼、数

外骨骼机器人膝关节设计与控制.docx
外骨骼机器人膝关节设计与控制外骨骼机器人膝关节设计与控制摘要:随着现代科技的不断发展,外骨骼机器人在康复治疗、助行辅助等领域得到了广泛应用。膝关节作为人体重要的关节之一,在外骨骼机器人设计中起着关键的作用。本论文对外骨骼机器人膝关节的设计与控制进行了分析与研究,旨在提高其稳定性、适应性和安全性,为康复治疗和助行辅助提供更好的支持。第一章引言外骨骼机器人作为一种新型的医疗器械,其主要功能是为行动受限患者提供康复治疗和助行辅助。外骨骼机器人作为一体化的机械装置,需要对膝关节进行合理的设计与控制。本章将介绍外骨
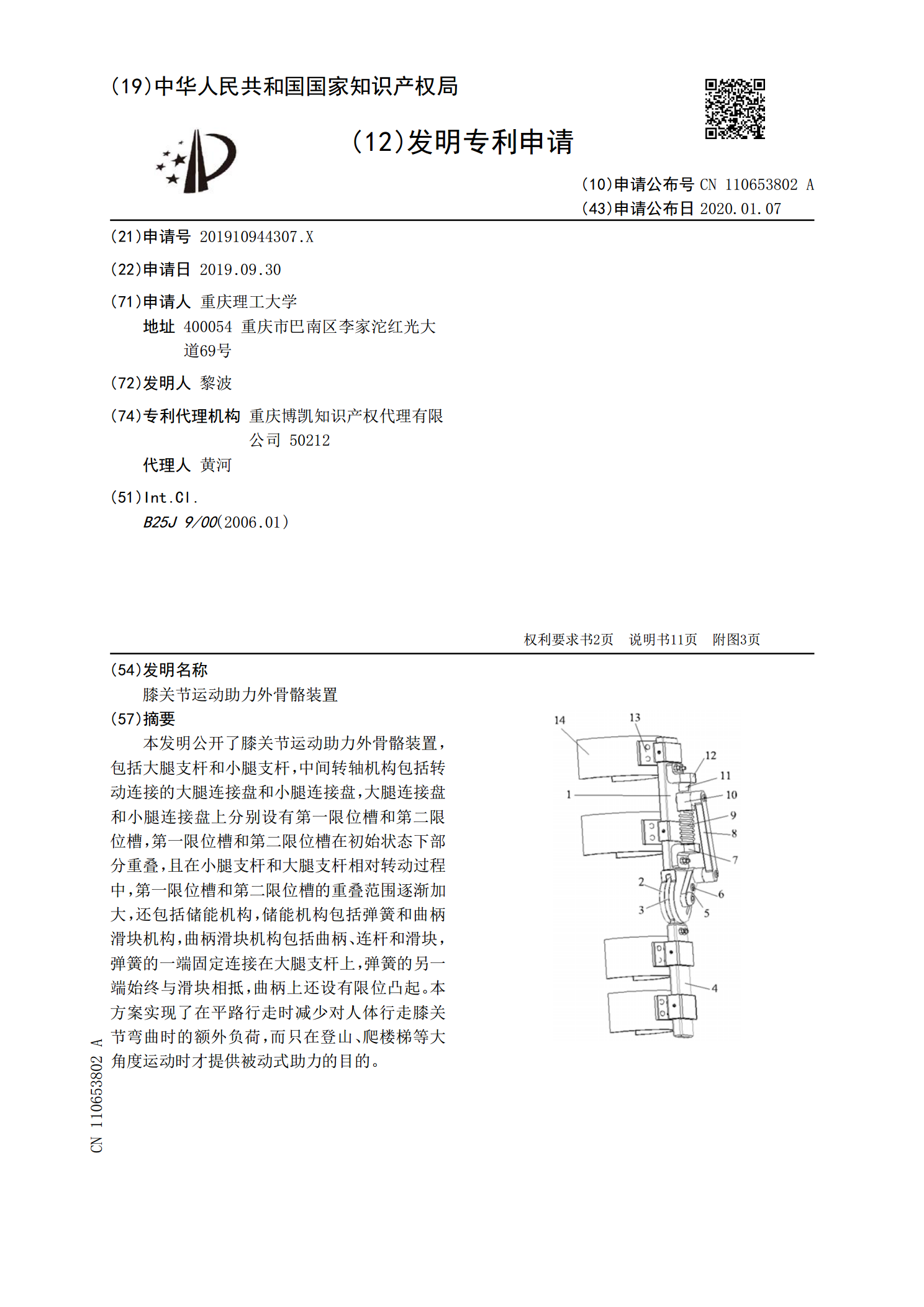
膝关节运动助力外骨骼装置.pdf
本发明公开了膝关节运动助力外骨骼装置,包括大腿支杆和小腿支杆,中间转轴机构包括转动连接的大腿连接盘和小腿连接盘,大腿连接盘和小腿连接盘上分别设有第一限位槽和第二限位槽,第一限位槽和第二限位槽在初始状态下部分重叠,且在小腿支杆和大腿支杆相对转动过程中,第一限位槽和第二限位槽的重叠范围逐渐加大,还包括储能机构,储能机构包括弹簧和曲柄滑块机构,曲柄滑块机构包括曲柄、连杆和滑块,弹簧的一端固定连接在大腿支杆上,弹簧的另一端始终与滑块相抵,曲柄上还设有限位凸起。本方案实现了在平路行走时减少对人体行走膝关节弯曲时的额