
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人.pdf

一只****呀淑

1/10
2/10
3/10
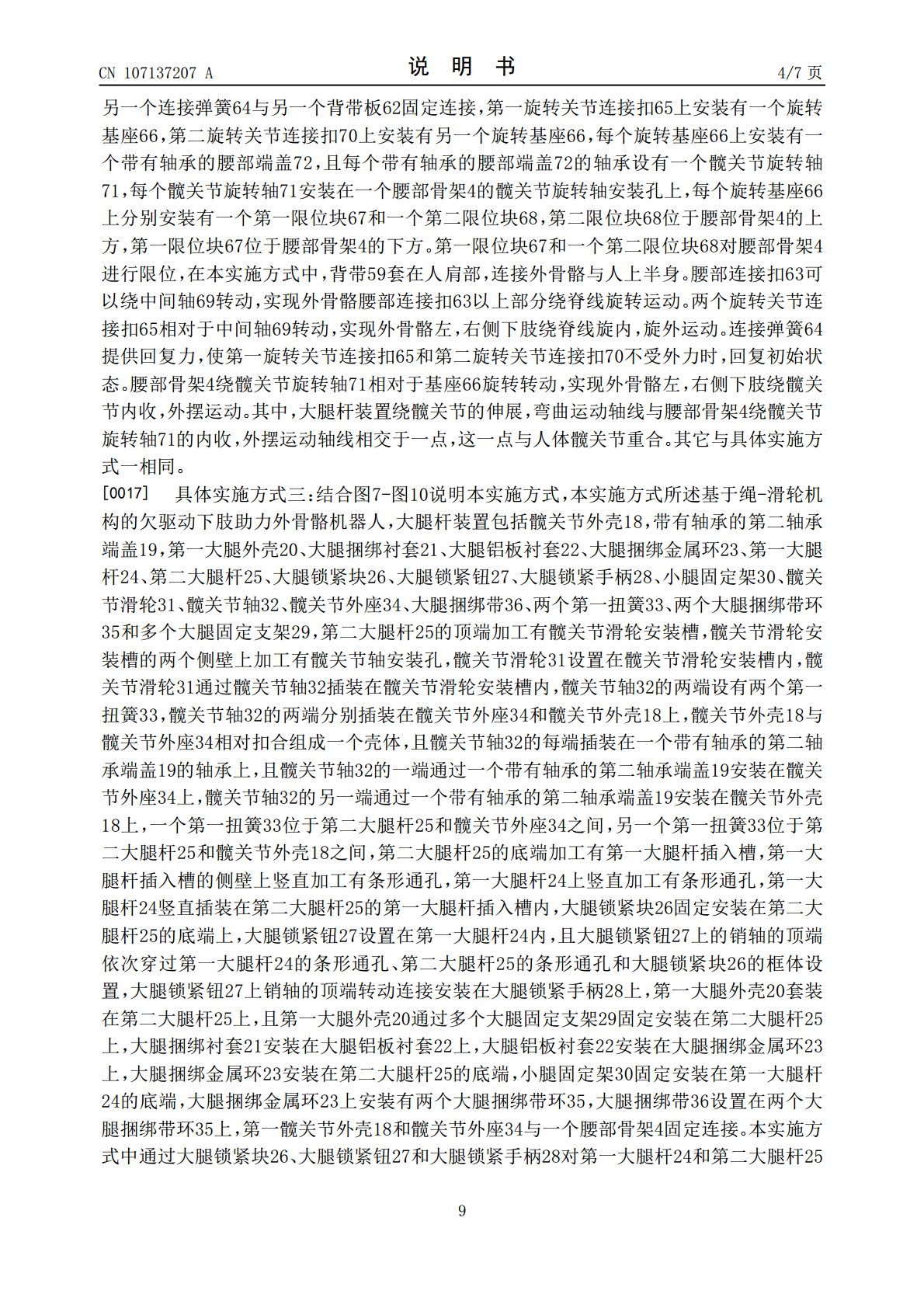
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人.pdf
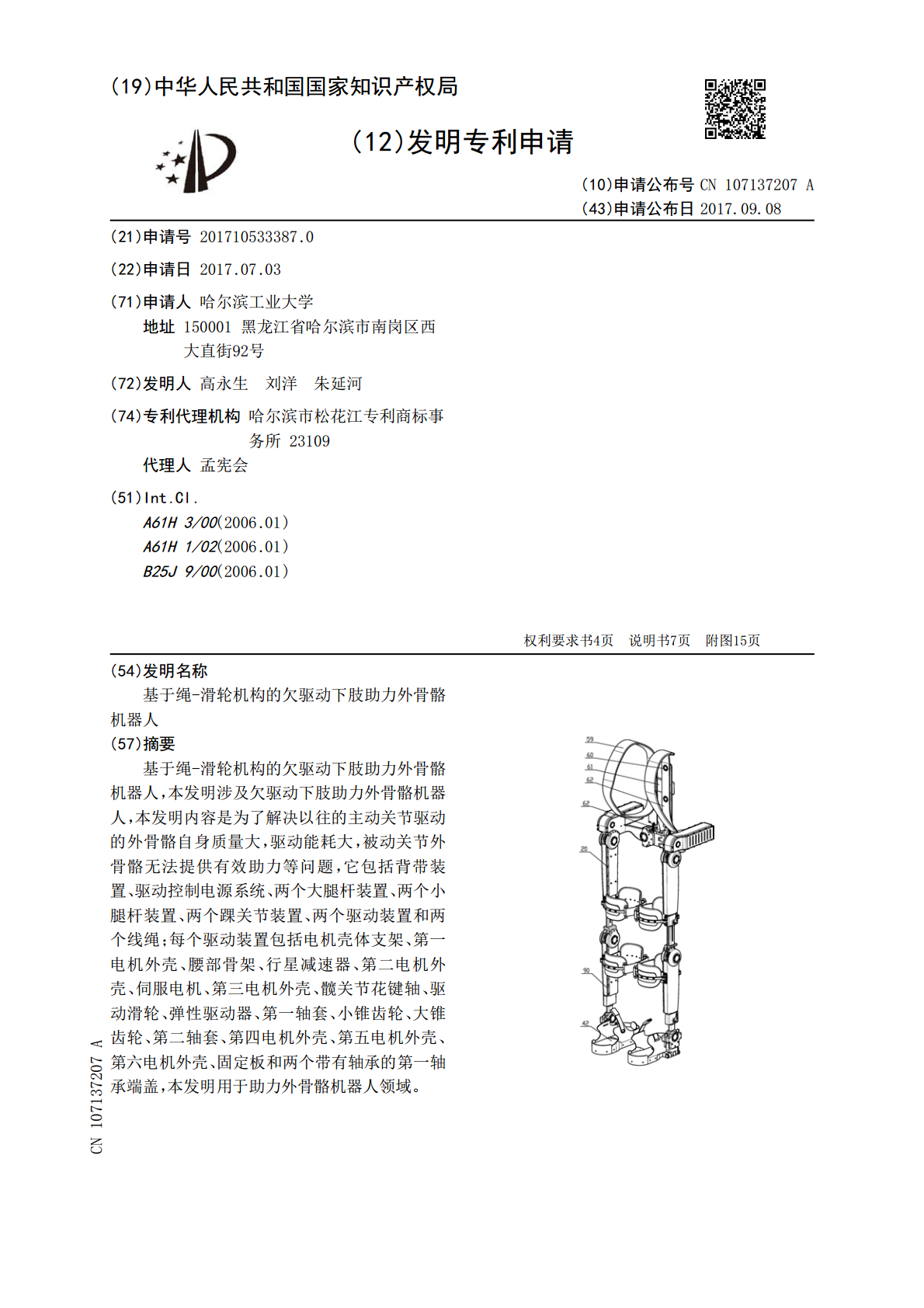
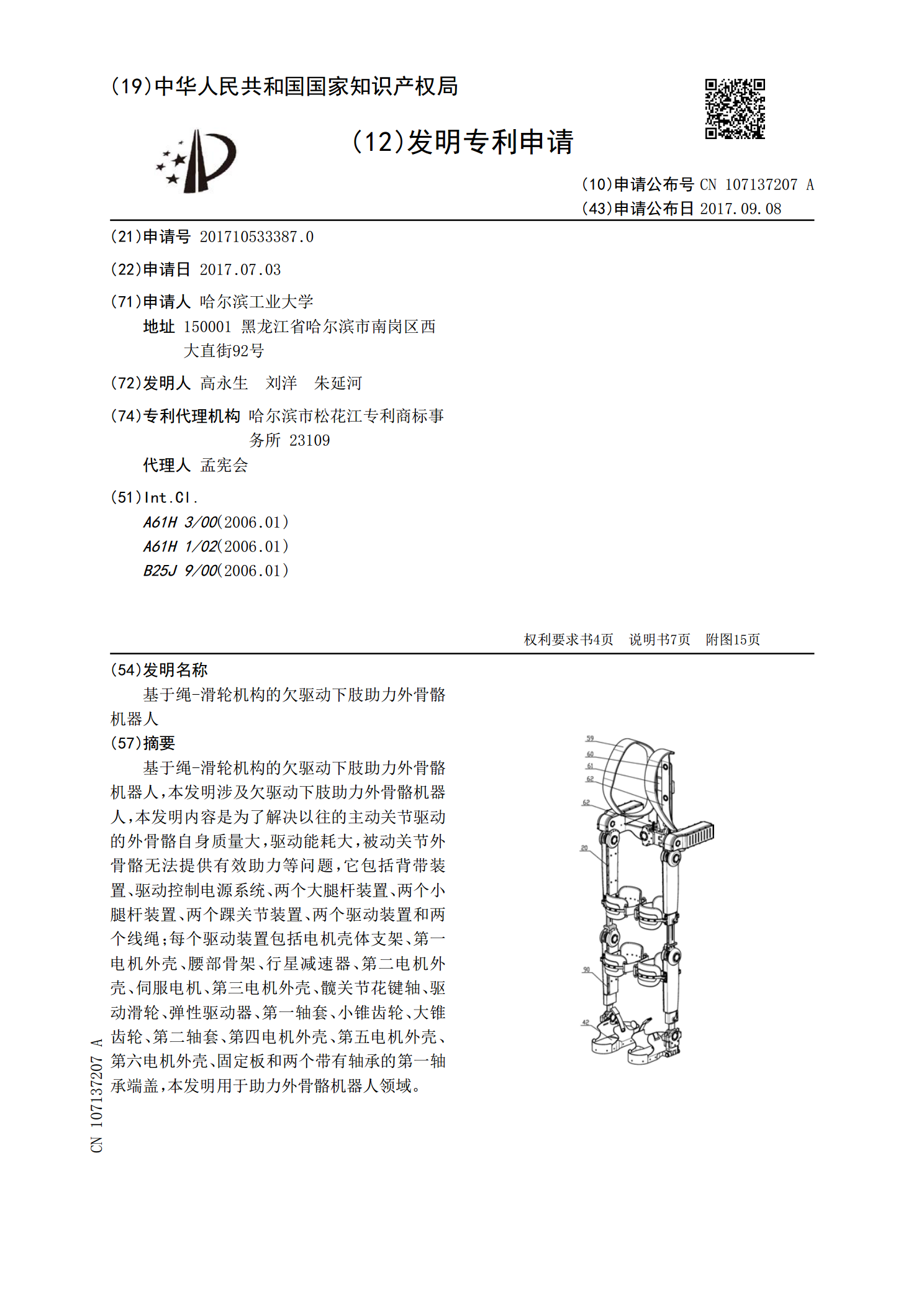
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人,本发明涉及欠驱动下肢助力外骨骼机器人,本发明内容是为了解决以往的主动关节驱动的外骨骼自身质量大,驱动能耗大,被动关节外骨骼无法提供有效助力等问题,它包括背带装置、驱动控制电源系统、两个大腿杆装置、两个小腿杆装置、两个踝关节装置、两个驱动装置和两个线绳;每个驱动装置包括电机壳体支架、第一电机外壳、腰部骨架、行星减速器、第二电机外壳、伺服电机、第三电机外壳、髋关节花键轴、驱动滑轮、弹性驱动器、第一轴套、小锥齿轮、大锥齿轮、第二轴套、第四电机外壳、第五电机外壳、第六

一种基于液压驱动的下肢搬运助力外骨骼机器人.pdf
本实用新型公开了一种基于液压驱动的下肢搬运助力外骨骼机器人,包括背板、肩关节连接机构、髋关节助力机构、膝关节连接机构和足部机构;背板包括肩部连接板、腰部连接板和纵向连接板;肩关节连接机构包括肩臂连接件、肩关节回转轴和肩背连接件;髋关节助力机构包括髋高调节板、固定片、支撑板、髋宽调节板、髋背回转件、双作用液压缸、压力传感器、腿外套、大腿内衬和大腿板;膝关节连接机构包括大腿连接板、前摇杆、后摇杆、小腿连接板和小腿板。本实用新型能助力搬运活动,而且不影响自由运动,提高人的负载能力,增加搬运效率;另外,只需要一个
用于下肢康复机器人的基于绳驱动的内足机构.pdf
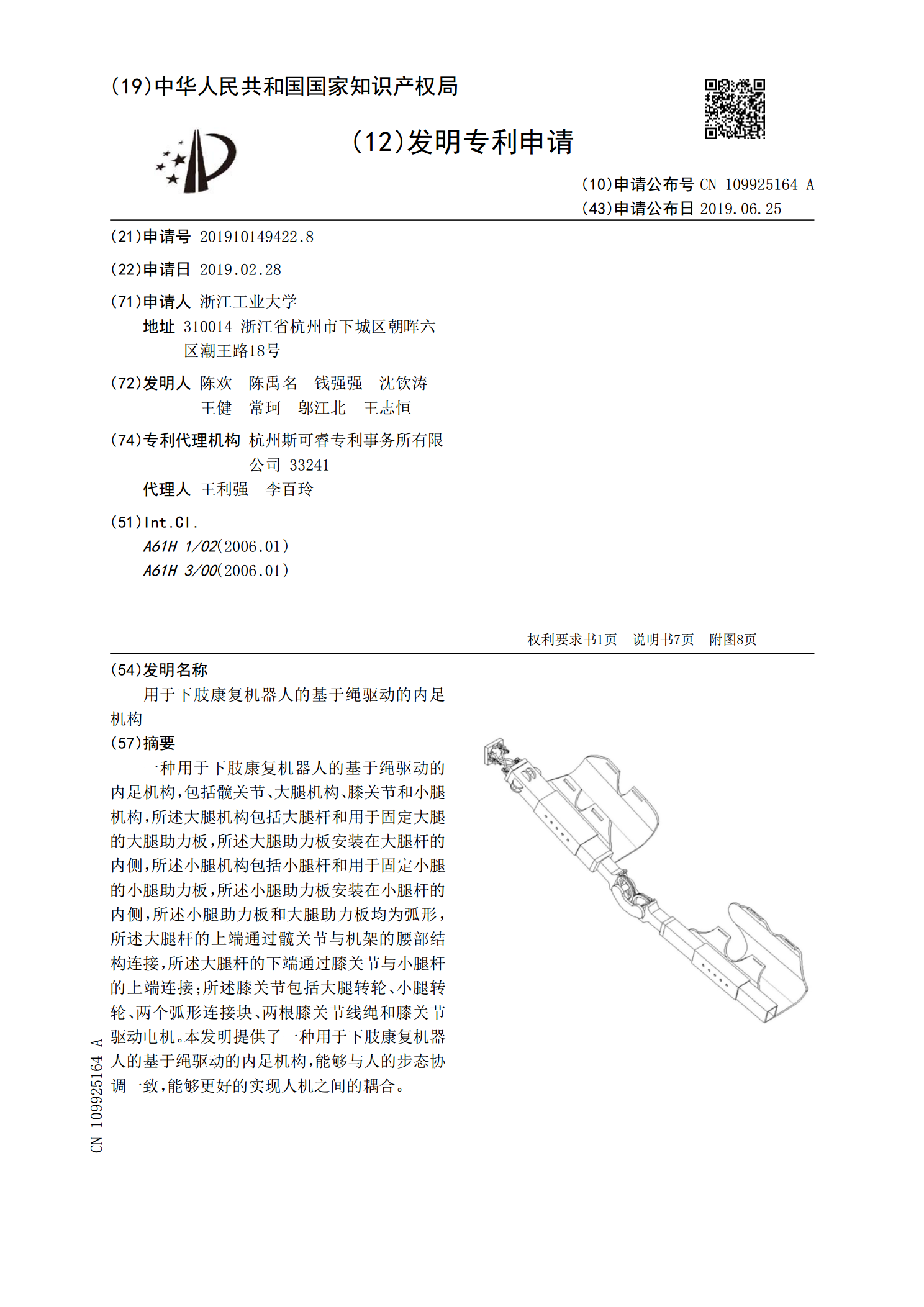
一种用于下肢康复机器人的基于绳驱动的内足机构,包括髋关节、大腿机构、膝关节和小腿机构,所述大腿机构包括大腿杆和用于固定大腿的大腿助力板,所述大腿助力板安装在大腿杆的内侧,所述小腿机构包括小腿杆和用于固定小腿的小腿助力板,所述小腿助力板安装在小腿杆的内侧,所述小腿助力板和大腿助力板均为弧形,所述大腿杆的上端通过髋关节与机架的腰部结构连接,所述大腿杆的下端通过膝关节与小腿杆的上端连接;所述膝关节包括大腿转轮、小腿转轮、两个弧形连接块、两根膝关节线绳和膝关节驱动电机。本发明提供了一种用于下肢康复机器人的基于绳驱

基于重力平衡的下肢助力外骨骼.pdf
基于重力平衡的下肢助力外骨骼,两个腰部对称设置在背部的两侧,腰部板通过连接元件与背部固连,上大腿板通过髋关节轴与腰部板铰接,小腿板通过膝关节轴与下大腿板铰接,上关节轴承与腰部下板铰接,连杆铰接在膝关节轴上,每个上大腿板的上下端分别安装一个大腿捆绑扣,每个小腿板的上下端分别安装一个小腿捆绑扣,第一钢丝绳的一端设置在腰部上板的里侧且与腰部上板固定连接、另一端从第一钢丝固定板的第一小孔中拉出,绕过大腿滑轮组后与大腿连接轮固接,第二钢丝绳的一端设置在小腿的里侧且与连杆固定连接、另一端从第二钢丝固定板的第二小孔中拉
一种骑乘式绳轮驱动下肢助行外骨骼机器人.pdf
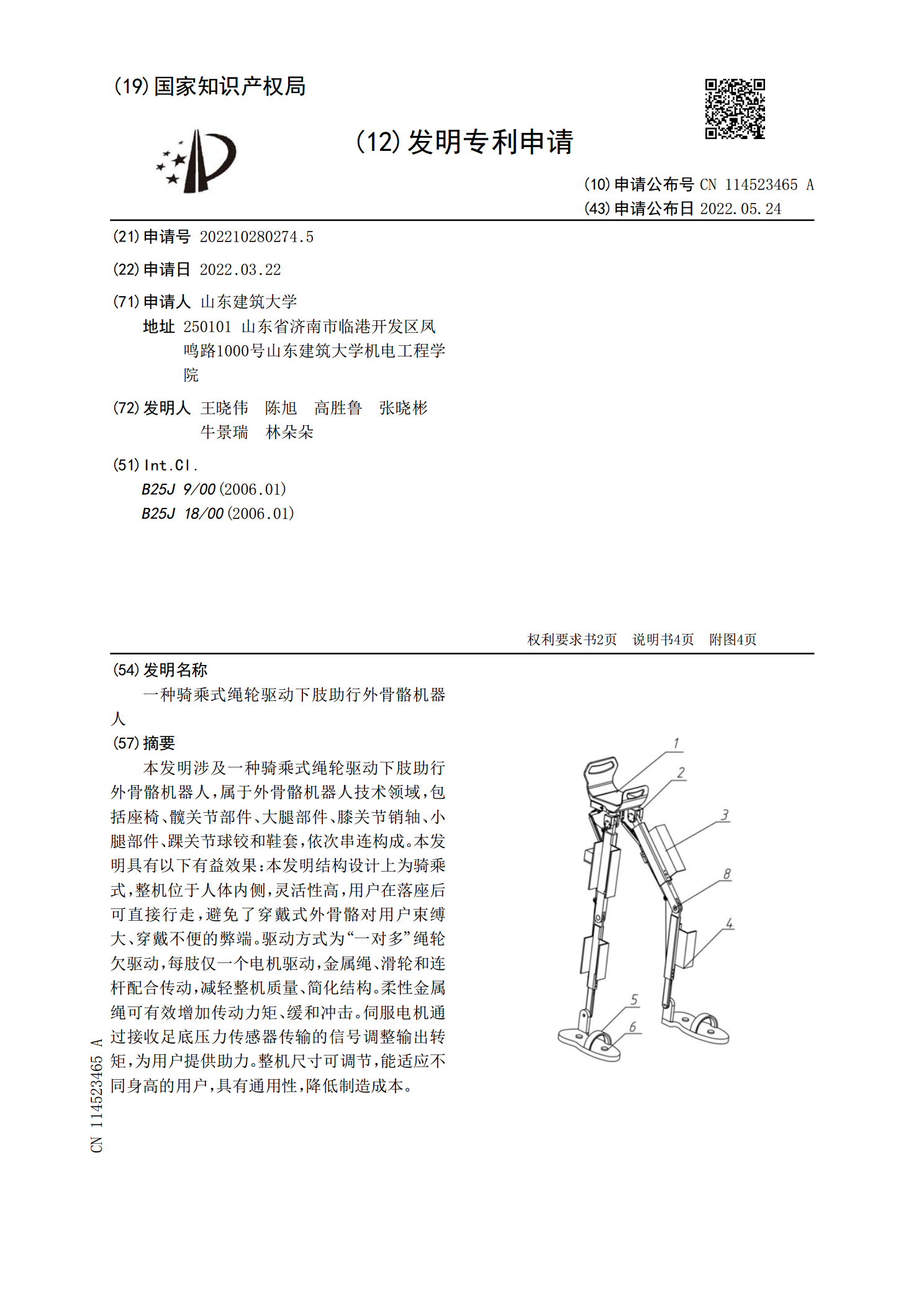
本发明涉及一种骑乘式绳轮驱动下肢助行外骨骼机器人,属于外骨骼机器人技术领域,包括座椅、髋关节部件、大腿部件、膝关节销轴、小腿部件、踝关节球铰和鞋套,依次串连构成。本发明具有以下有益效果:本发明结构设计上为骑乘式,整机位于人体内侧,灵活性高,用户在落座后可直接行走,避免了穿戴式外骨骼对用户束缚大、穿戴不便的弊端。驱动方式为“一对多”绳轮欠驱动,每肢仅一个电机驱动,金属绳、滑轮和连杆配合传动,减轻整机质量、简化结构。柔性金属绳可有效增加传动力矩、缓和冲击。伺服电机通过接收足底压力传感器传输的信号调整输出转矩,