
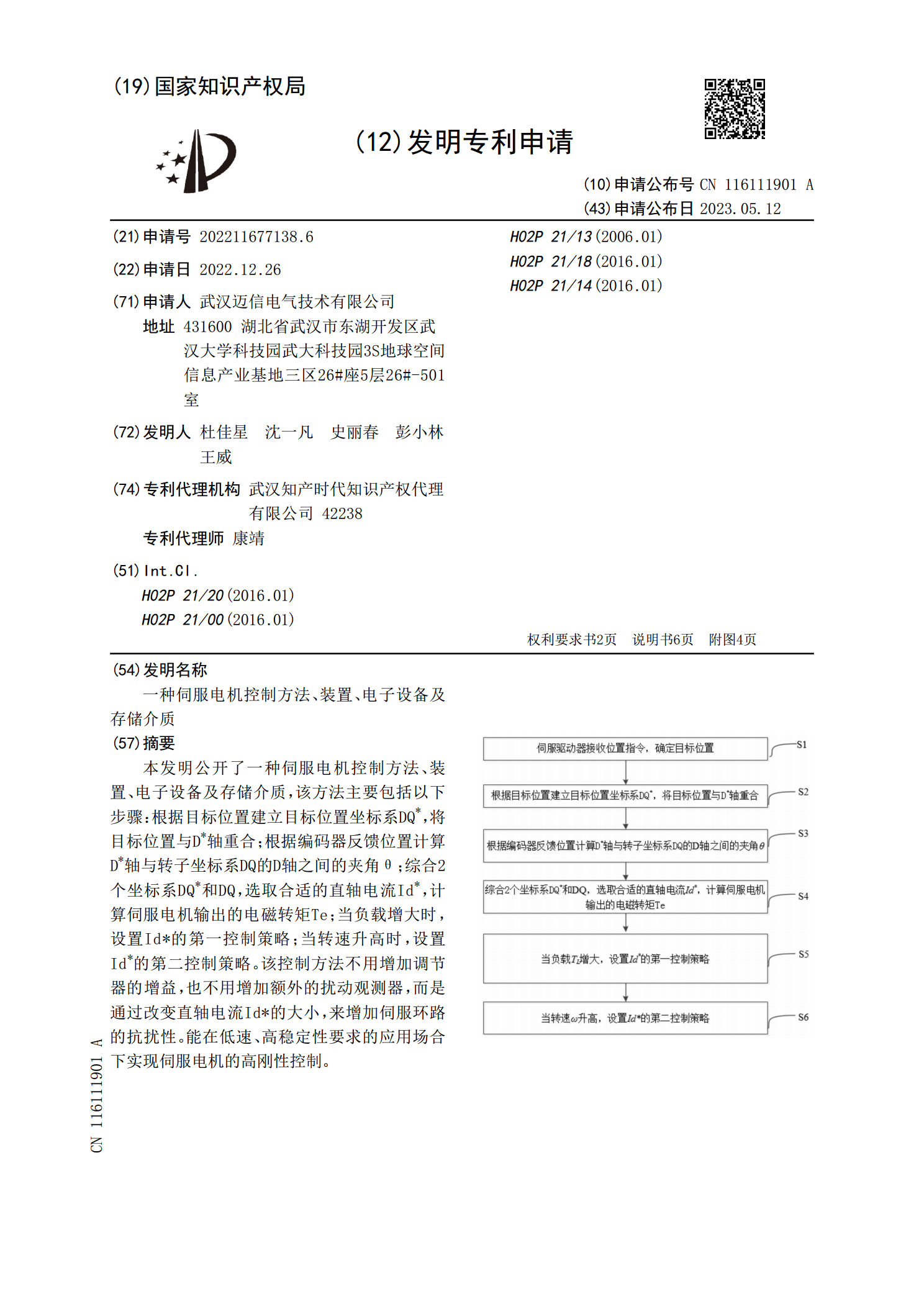
一种伺服电机控制方法、装置、电子设备及存储介质.pdf

朋兴****en

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种伺服电机控制方法、装置、电子设备及存储介质.pdf
本发明公开了一种伺服电机控制方法、装置、电子设备及存储介质,该方法主要包括以下步骤:根据目标位置建立目标位置坐标系DQ
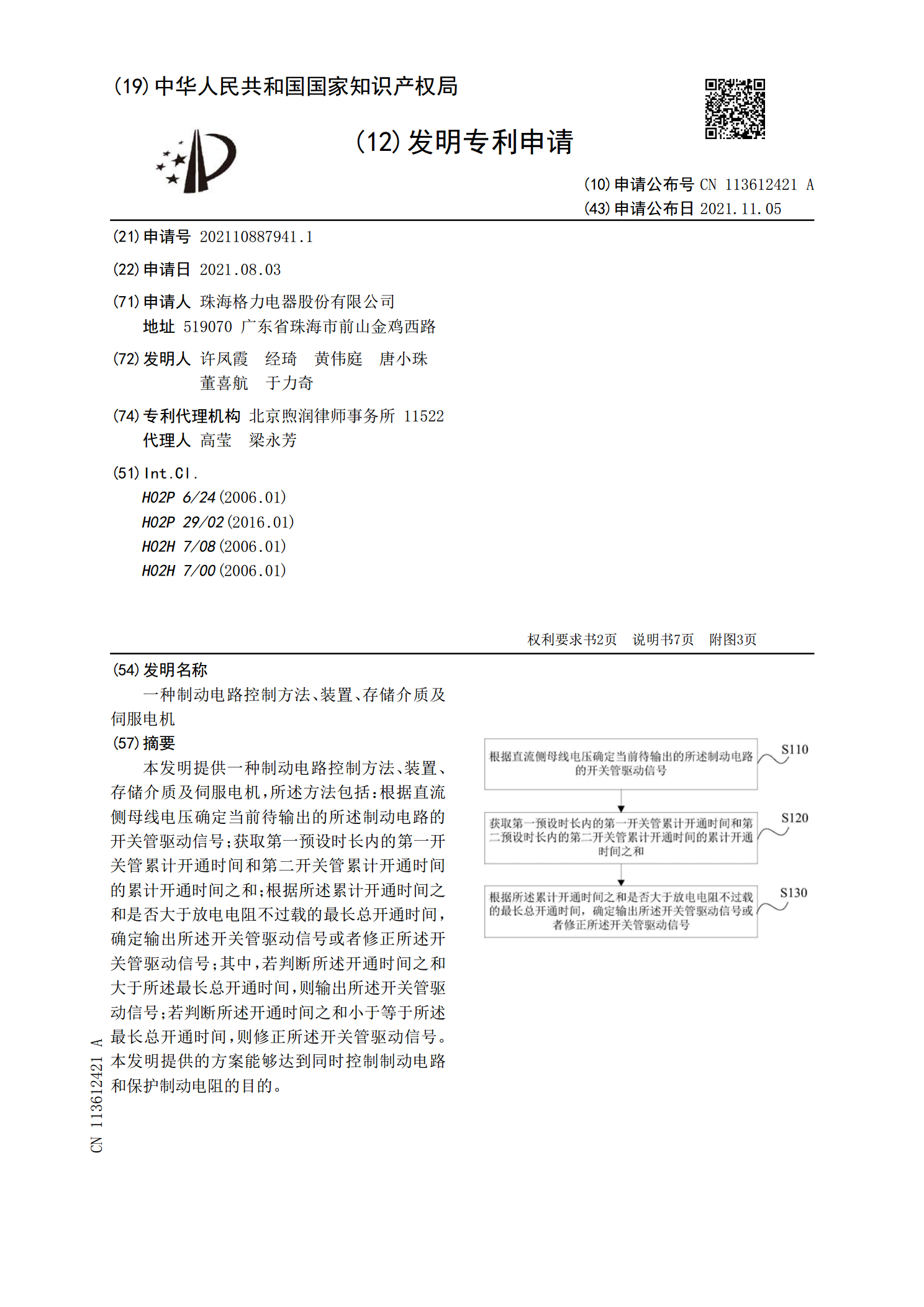
一种制动电路控制方法、装置、存储介质及伺服电机.pdf
本发明提供一种制动电路控制方法、装置、存储介质及伺服电机,所述方法包括:根据直流侧母线电压确定当前待输出的所述制动电路的开关管驱动信号;获取第一预设时长内的第一开关管累计开通时间和第二开关管累计开通时间的累计开通时间之和;根据所述累计开通时间之和是否大于放电电阻不过载的最长总开通时间,确定输出所述开关管驱动信号或者修正所述开关管驱动信号;其中,若判断所述开通时间之和大于所述最长总开通时间,则输出所述开关管驱动信号;若判断所述开通时间之和小于等于所述最长总开通时间,则修正所述开关管驱动信号。本发明提供的方案
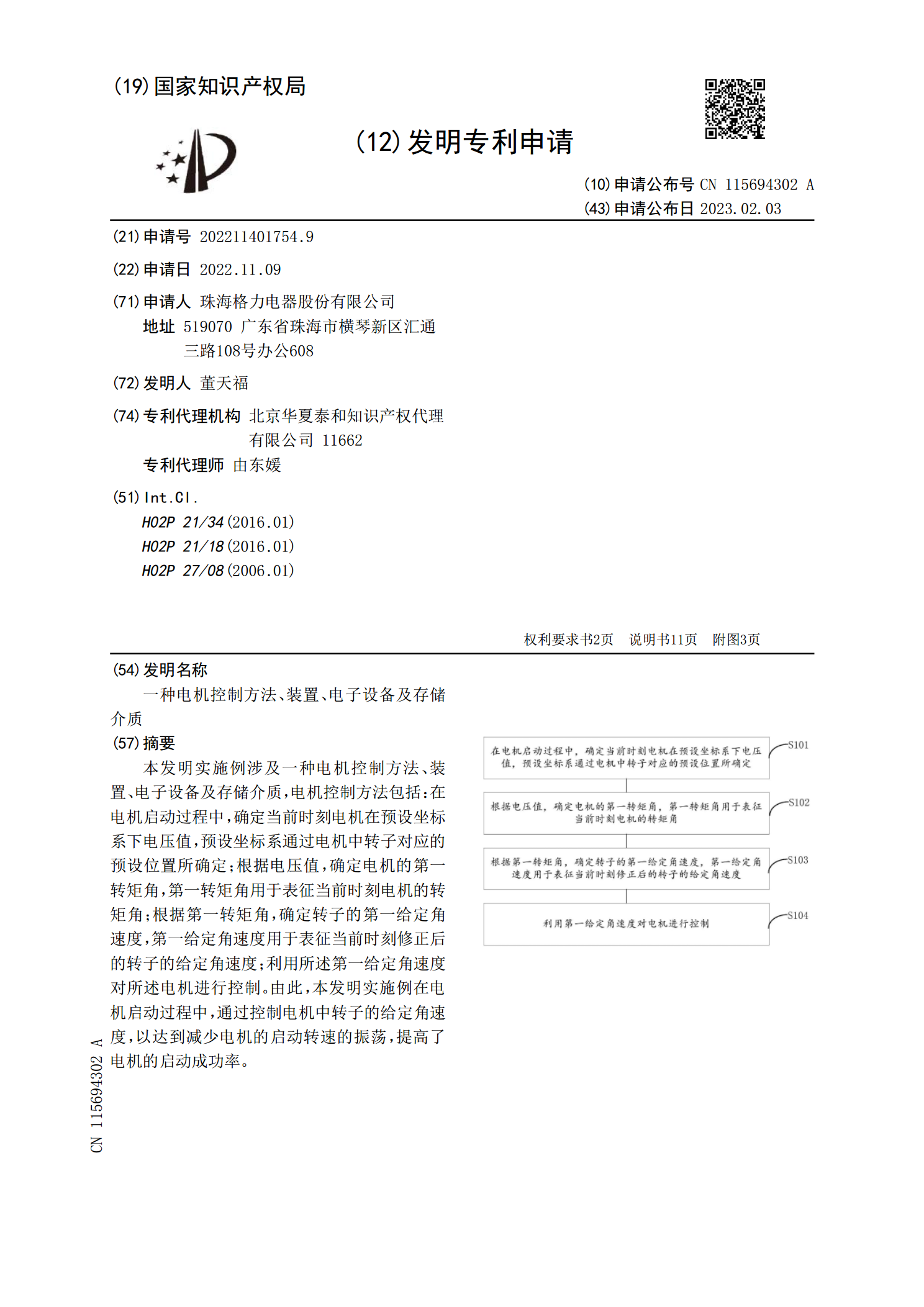
一种电机控制方法、装置、电子设备及存储介质.pdf
本发明实施例涉及一种电机控制方法、装置、电子设备及存储介质,电机控制方法包括:在电机启动过程中,确定当前时刻电机在预设坐标系下电压值,预设坐标系通过电机中转子对应的预设位置所确定;根据电压值,确定电机的第一转矩角,第一转矩角用于表征当前时刻电机的转矩角;根据第一转矩角,确定转子的第一给定角速度,第一给定角速度用于表征当前时刻修正后的转子的给定角速度;利用所述第一给定角速度对所述电机进行控制。由此,本发明实施例在电机启动过程中,通过控制电机中转子的给定角速度,以达到减少电机的启动转速的振荡,提高了电机的启动
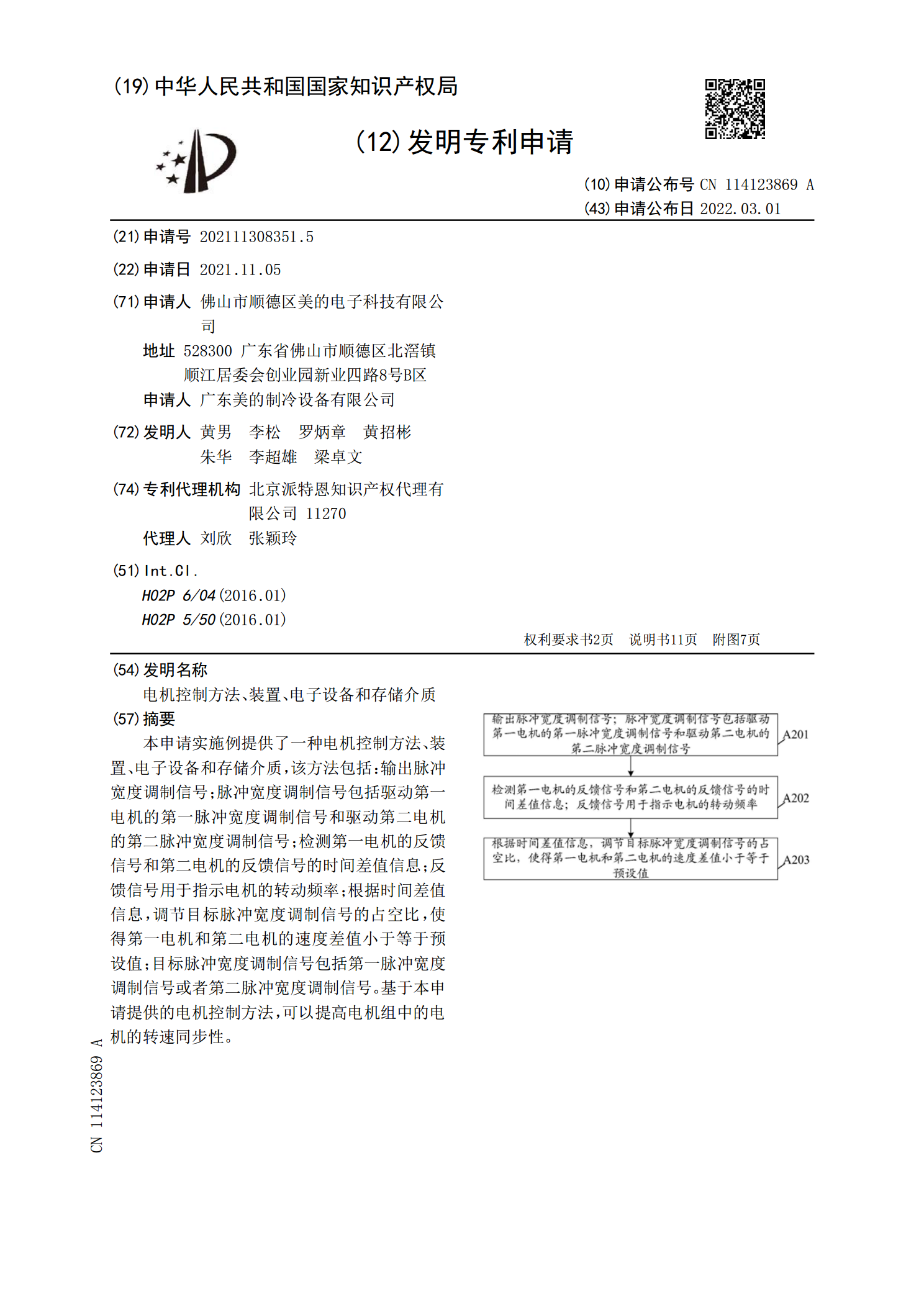
电机控制方法、装置、电子设备和存储介质.pdf
本申请实施例提供了一种电机控制方法、装置、电子设备和存储介质,该方法包括:输出脉冲宽度调制信号;脉冲宽度调制信号包括驱动第一电机的第一脉冲宽度调制信号和驱动第二电机的第二脉冲宽度调制信号;检测第一电机的反馈信号和第二电机的反馈信号的时间差值信息;反馈信号用于指示电机的转动频率;根据时间差值信息,调节目标脉冲宽度调制信号的占空比,使得第一电机和第二电机的速度差值小于等于预设值;目标脉冲宽度调制信号包括第一脉冲宽度调制信号或者第二脉冲宽度调制信号。基于本申请提供的电机控制方法,可以提高电机组中的电机的转速同步

驱动电机控制方法、装置、电子设备及存储介质.pdf
本发明提供一种驱动电机控制方法、装置、电子设备及存储介质。该方法包括:实时检测目标电机对应的控制系统中速度传感器的状态,速度传感器的状态为正常或失效;若速度传感器失效,则在检测到速度传感器失效后的预设时间内,基于预设的调整系数对预设虚拟观测器提供的速度观测值进行调整,基于调整后的速度观测值对目标电机进行控制,在检测到速度传感器失效预设时间后,基于预设虚拟观测器的速度观测值对目标电机进行控制。本发明能够在节约目标电机的控制系统的容错成本的同时,提高目标电机运行的可靠性和稳定性。