
一种基于场景多方向体素化的多光源场景加速绘制方法.pdf

玉怡****文档


1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于场景多方向体素化的多光源场景加速绘制方法.pdf
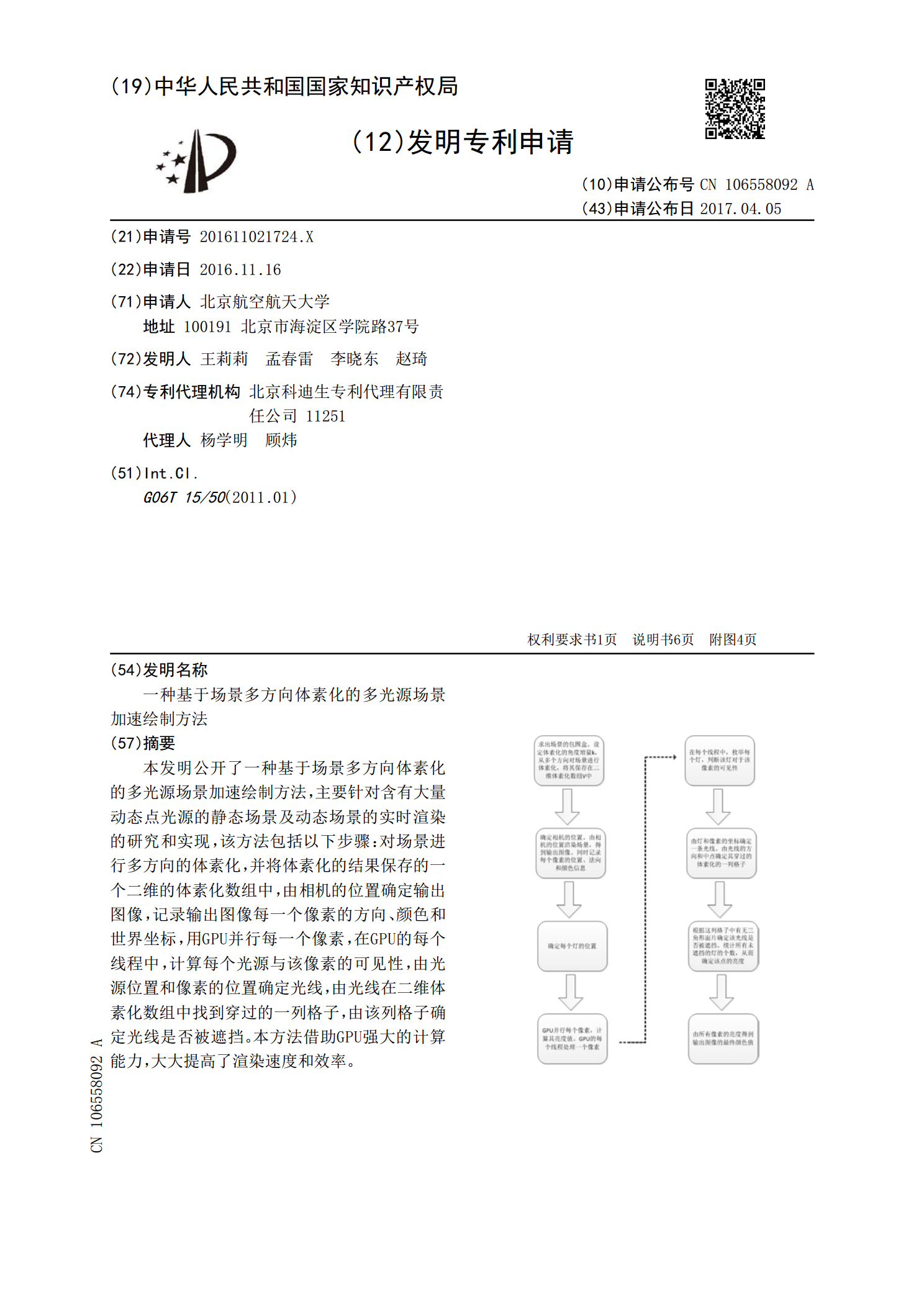
本发明公开了一种基于场景多方向体素化的多光源场景加速绘制方法,主要针对含有大量动态点光源的静态场景及动态场景的实时渲染的研究和实现,该方法包括以下步骤:对场景进行多方向的体素化,并将体素化的结果保存的一个二维的体素化数组中,由相机的位置确定输出图像,记录输出图像每一个像素的方向、颜色和世界坐标,用GPU并行每一个像素,在GPU的每个线程中,计算每个光源与该像素的可见性,由光源位置和像素的位置确定光线,由光线在二维体素化数组中找到穿过的一列格子,由该列格子确定光线是否被遮挡。本方法借助GPU强大的计算能力,

基于光分片的多光源场景渲染方法.pdf
本发明公开了一种基于光分片的多光源场景渲染方法,包括如下步骤:根据待渲染多光源场景中各个采样面的几何邻近关系对待渲染多光源场景的初始全局光源矩阵进行分片,得到若干个切片;针对每一个切片进行片采样形成初始全局光源矩阵的采样矩阵,并对采样矩阵进行光源分簇得到分簇后的采样矩阵,并形成各个分片的细分矩阵;根据所有细分矩阵计算该对应像素点的像素值,采用低秩矩阵补全法对待渲染的多光源场景进行渲染。本发明基于分光片的方法对初始光源矩阵进行逐步分片,将类似像素点和类似光源聚合在一起,大大降低了初始全局光源矩阵的秩,既保证
基于GPU光栅器的场景体素化方法.pdf
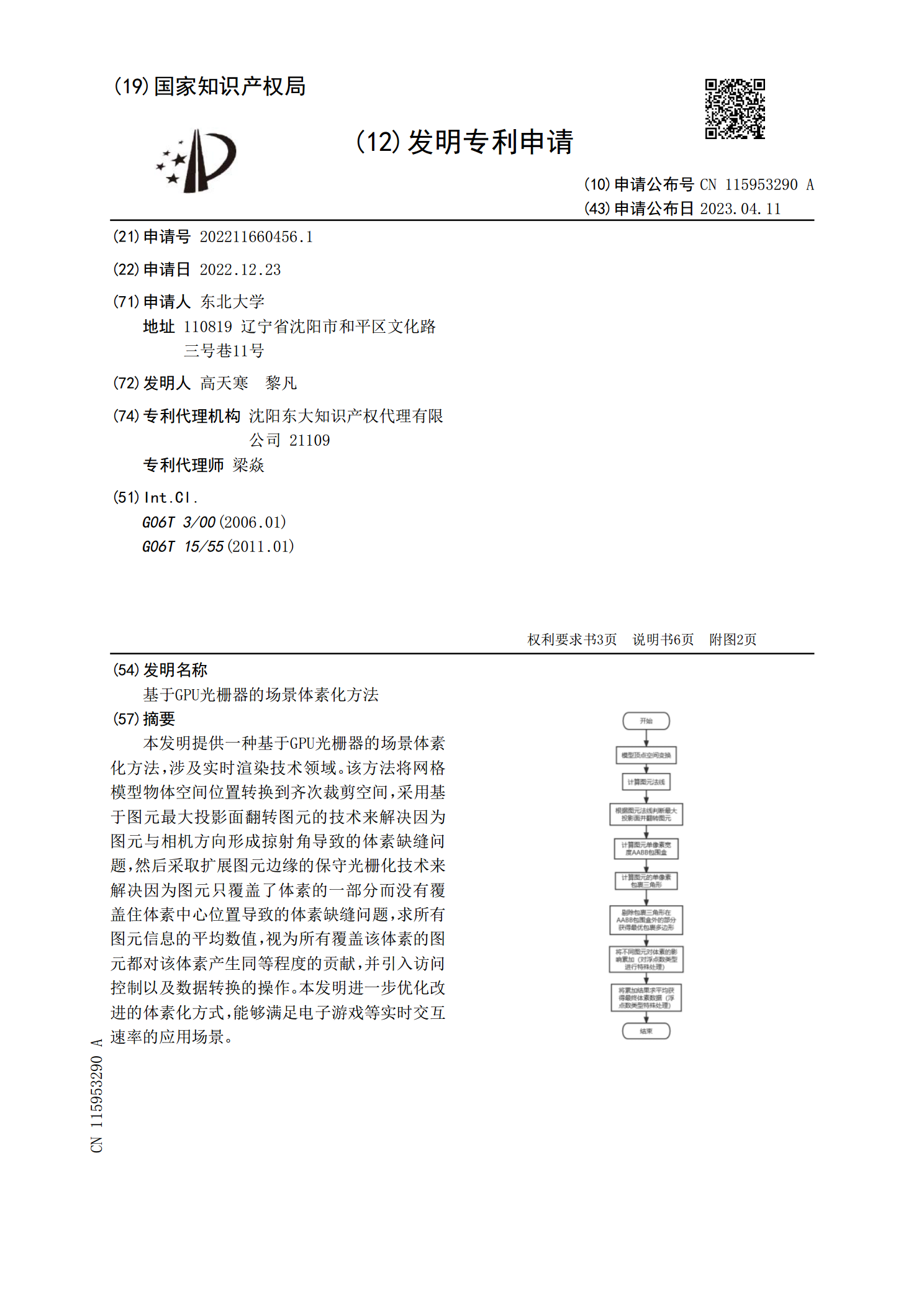
本发明提供一种基于GPU光栅器的场景体素化方法,涉及实时渲染技术领域。该方法将网格模型物体空间位置转换到齐次裁剪空间,采用基于图元最大投影面翻转图元的技术来解决因为图元与相机方向形成掠射角导致的体素缺缝问题,然后采取扩展图元边缘的保守光栅化技术来解决因为图元只覆盖了体素的一部分而没有覆盖住体素中心位置导致的体素缺缝问题,求所有图元信息的平均数值,视为所有覆盖该体素的图元都对该体素产生同等程度的贡献,并引入访问控制以及数据转换的操作。本发明进一步优化改进的体素化方式,能够满足电子游戏等实时交互速率的应用场景
一种基于GPU加速的海中场景建模与实时交互绘制方法.pdf
本发明公开了一种基于GPU加速的海中场景建模与实时交互绘制方法。其步骤为:(1)对海中场景声纳数据进行预处理:水体地层分离、目标检测、去噪增强;(2)利用GPU加速实现了可交互的基于光线投射方法的海中场景三维体数据可视化建模;(3)基于GPU加速实现了海中目标声纳数据表面提取和实时绘制。本发明解决了以往可视化算法不适用海中场景声纳数据快速建模和交互可视化分析的问题。减少了主观因素影响,使得数据的初始可视化结果更加准确。本发明使用曲面细分方法对marchingcube算法的目标表面提取结果进行优化处理,得到
一种基于场景化多源数据融合分析的方法和系统.pdf
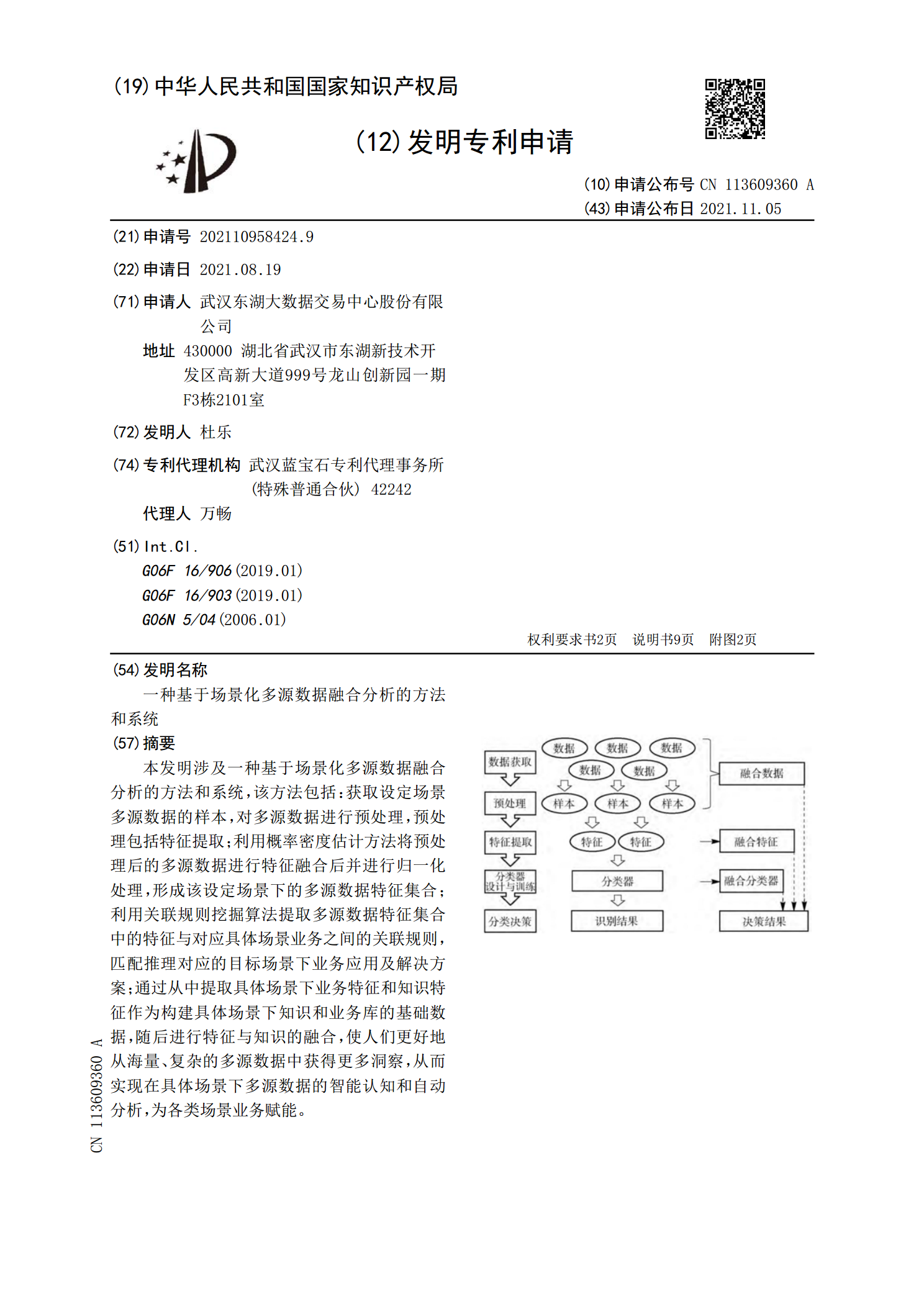
本发明涉及一种基于场景化多源数据融合分析的方法和系统,该方法包括:获取设定场景多源数据的样本,对多源数据进行预处理,预处理包括特征提取;利用概率密度估计方法将预处理后的多源数据进行特征融合后并进行归一化处理,形成该设定场景下的多源数据特征集合;利用关联规则挖掘算法提取多源数据特征集合中的特征与对应具体场景业务之间的关联规则,匹配推理对应的目标场景下业务应用及解决方案;通过从中提取具体场景下业务特征和知识特征作为构建具体场景下知识和业务库的基础数据,随后进行特征与知识的融合,使人们更好地从海量、复杂的多源数