
一种面向3D场景的光线追踪优化方法.pdf

是飞****文章


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面向3D场景的光线追踪优化方法.pdf
本发明提供一种面向3D场景的光线追踪优化方法,包括:创建3D场景的包围盒和3D场景中每个物体的AABB包围盒;建立3D场景的KD‑Tree;建立渲染管道。本发明通过使用GPU并行计算来提升光线追踪的渲染效率。不同于以往直接使用CPU对结点进行计算,同过并行计算解决光线追踪过程中大量重复的冗余计算。在基于传统SAH算法划分的基础上,对结点的优化划分处理。为了进一步提升渲染效率,本发明将KD‑Tree划分的任务块通过共享内存进行进一步的加速与优化,减少GPU与memory的传输次数,从而提高效率,提升渲染效果
一种光线追踪优化方法.pdf
本发明提供一种光线追踪优化方法,包括:光线追踪优化的任务由GPU渲染端和CPU主机端来执行,其中CPU主机端负责模型解析和输出处理,GPU渲染端负责根据模型数据信息建立KD‑Tree和光线追踪渲染。本发明通过合理使用GPU端的内存资源和应用OpenGL‑CUDA图形互操作函数提高光线追踪的执行效率。同时本发明使用GPU端结合OpenGL‑CUDA图形互操作函数,实现光线追踪结果的显示,使方法具有更好的跨平台性,有效解决数据频繁传输带来的效率问题。与传统的基于GPU上实现的光线追踪相比,渲染效率有明显提高,
一种基于动态场景的实时光线追踪加速结构的方法.pdf
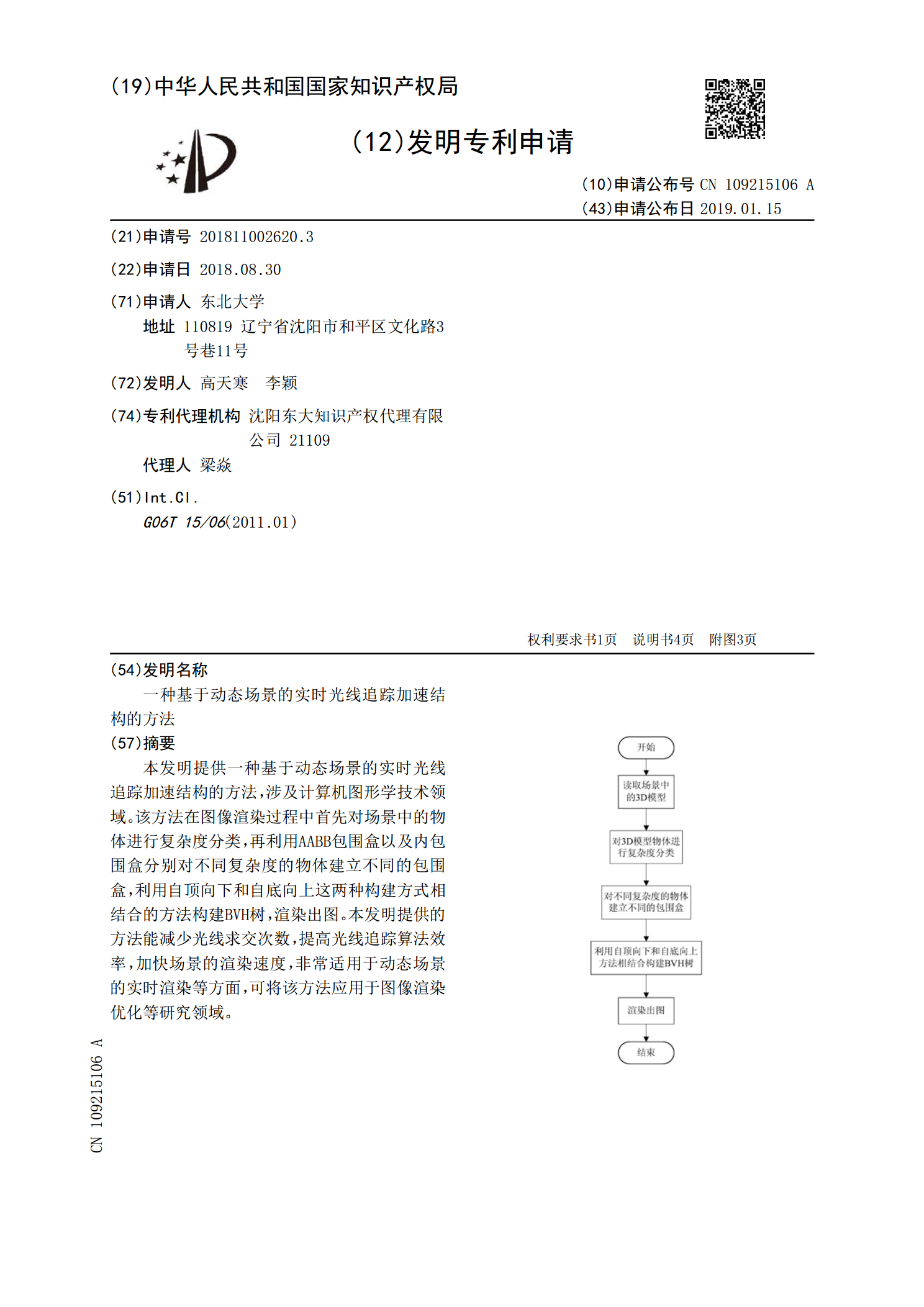
本发明提供一种基于动态场景的实时光线追踪加速结构的方法,涉及计算机图形学技术领域。该方法在图像渲染过程中首先对场景中的物体进行复杂度分类,再利用AABB包围盒以及内包围盒分别对不同复杂度的物体建立不同的包围盒,利用自顶向下和自底向上这两种构建方式相结合的方法构建BVH树,渲染出图。本发明提供的方法能减少光线求交次数,提高光线追踪算法效率,加快场景的渲染速度,非常适用于动态场景的实时渲染等方面,可将该方法应用于图像渲染优化等研究领域。
一种基于算法的光线追踪方法.pdf
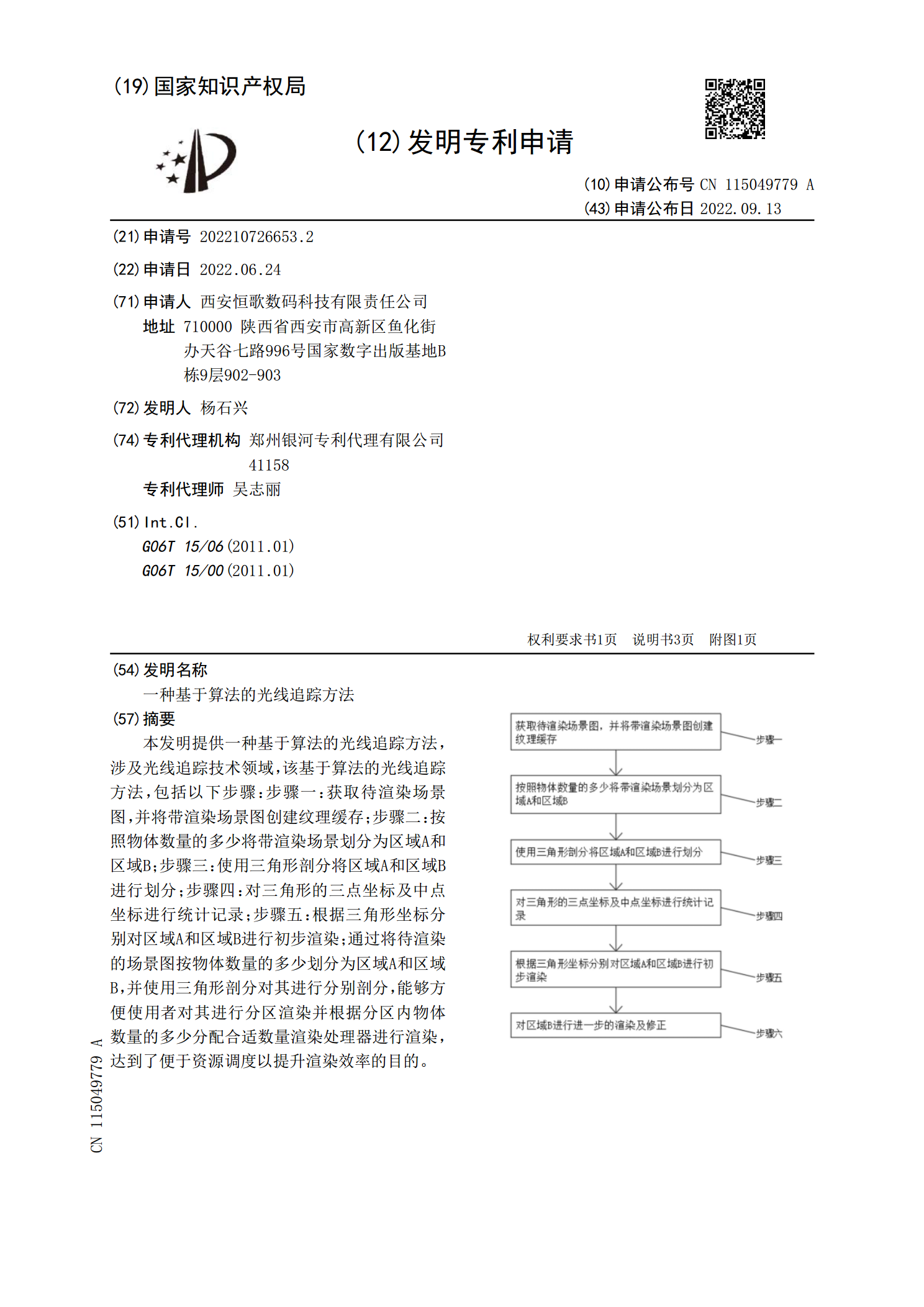
本发明提供一种基于算法的光线追踪方法,涉及光线追踪技术领域,该基于算法的光线追踪方法,包括以下步骤:步骤一:获取待渲染场景图,并将带渲染场景图创建纹理缓存;步骤二:按照物体数量的多少将带渲染场景划分为区域A和区域B;步骤三:使用三角形剖分将区域A和区域B进行划分;步骤四:对三角形的三点坐标及中点坐标进行统计记录;步骤五:根据三角形坐标分别对区域A和区域B进行初步渲染;通过将待渲染的场景图按物体数量的多少划分为区域A和区域B,并使用三角形剖分对其进行分别剖分,能够方便使用者对其进行分区渲染并根据分区内物体数
一种3D场景的优化方法、装置、设备及介质.pdf
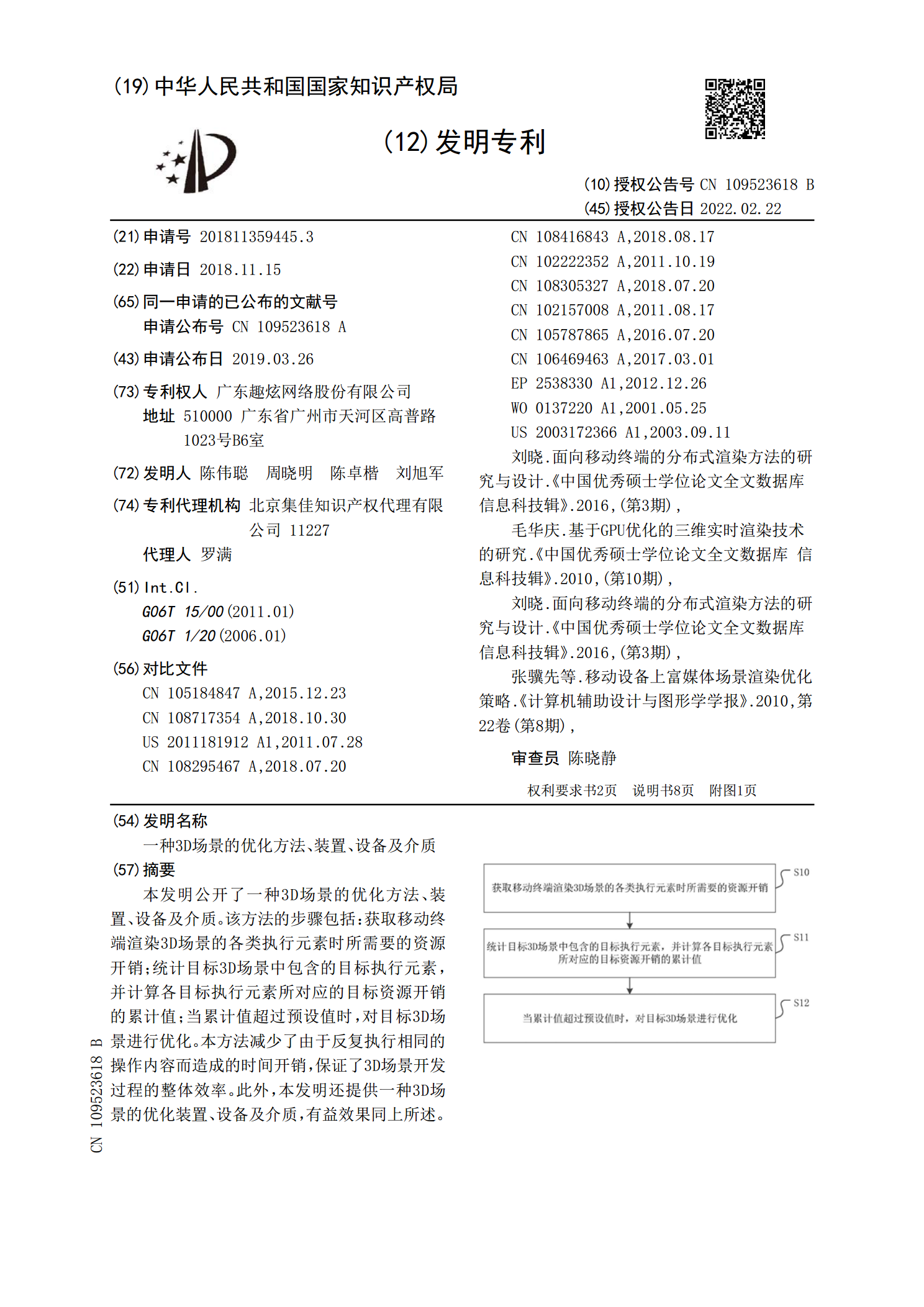
本发明公开了一种3D场景的优化方法、装置、设备及介质。该方法的步骤包括:获取移动终端渲染3D场景的各类执行元素时所需要的资源开销;统计目标3D场景中包含的目标执行元素,并计算各目标执行元素所对应的目标资源开销的累计值;当累计值超过预设值时,对目标3D场景进行优化。本方法减少了由于反复执行相同的操作内容而造成的时间开销,保证了3D场景开发过程的整体效率。此外,本发明还提供一种3D场景的优化装置、设备及介质,有益效果同上所述。