
一种光线追踪优化方法.pdf

Ro****44

1/9

2/9
3/9

4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种光线追踪优化方法.pdf
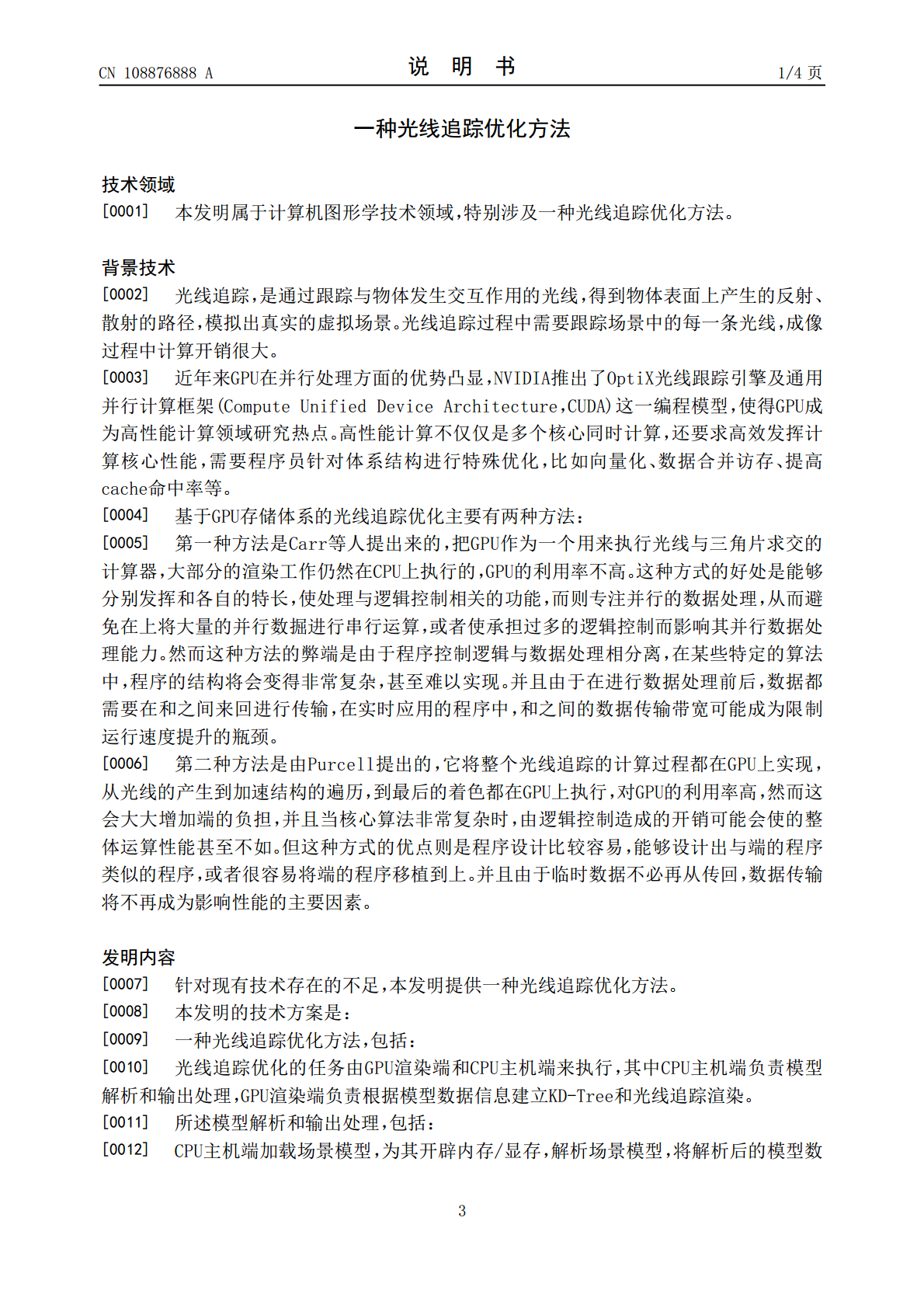
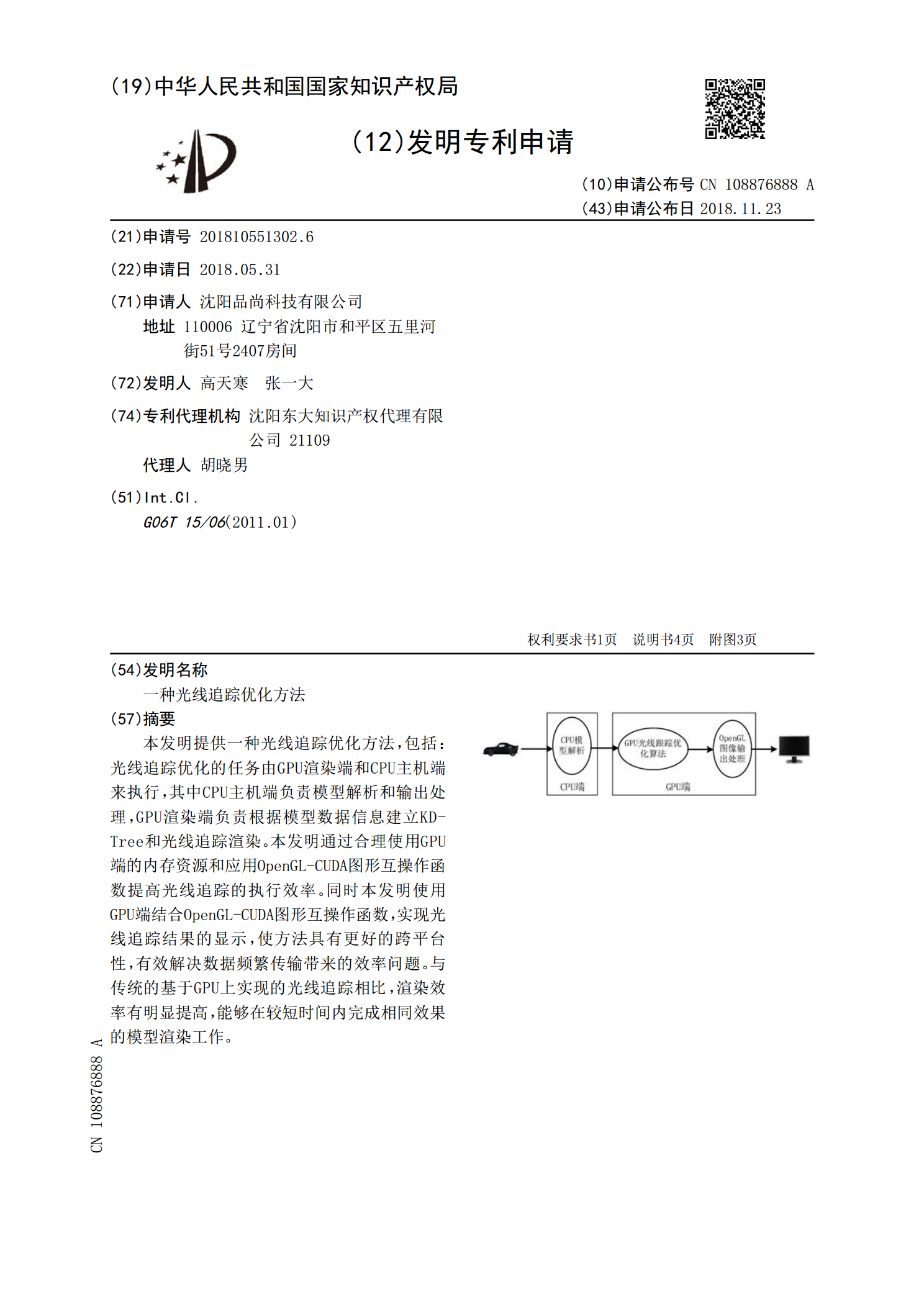
本发明提供一种光线追踪优化方法,包括:光线追踪优化的任务由GPU渲染端和CPU主机端来执行,其中CPU主机端负责模型解析和输出处理,GPU渲染端负责根据模型数据信息建立KD‑Tree和光线追踪渲染。本发明通过合理使用GPU端的内存资源和应用OpenGL‑CUDA图形互操作函数提高光线追踪的执行效率。同时本发明使用GPU端结合OpenGL‑CUDA图形互操作函数,实现光线追踪结果的显示,使方法具有更好的跨平台性,有效解决数据频繁传输带来的效率问题。与传统的基于GPU上实现的光线追踪相比,渲染效率有明显提高,
一种面向3D场景的光线追踪优化方法.pdf
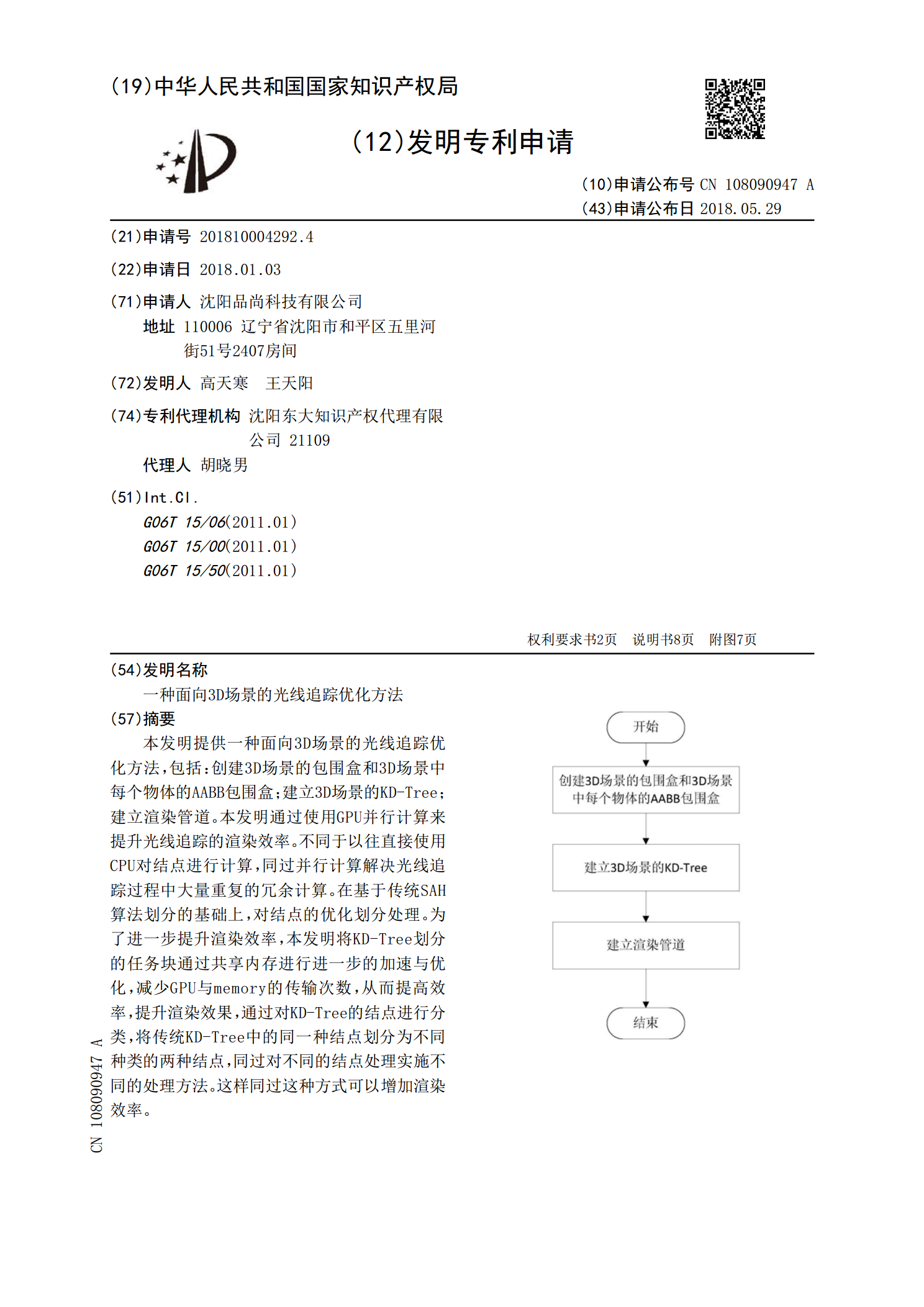
本发明提供一种面向3D场景的光线追踪优化方法,包括:创建3D场景的包围盒和3D场景中每个物体的AABB包围盒;建立3D场景的KD‑Tree;建立渲染管道。本发明通过使用GPU并行计算来提升光线追踪的渲染效率。不同于以往直接使用CPU对结点进行计算,同过并行计算解决光线追踪过程中大量重复的冗余计算。在基于传统SAH算法划分的基础上,对结点的优化划分处理。为了进一步提升渲染效率,本发明将KD‑Tree划分的任务块通过共享内存进行进一步的加速与优化,减少GPU与memory的传输次数,从而提高效率,提升渲染效果
一种基于算法的光线追踪方法.pdf
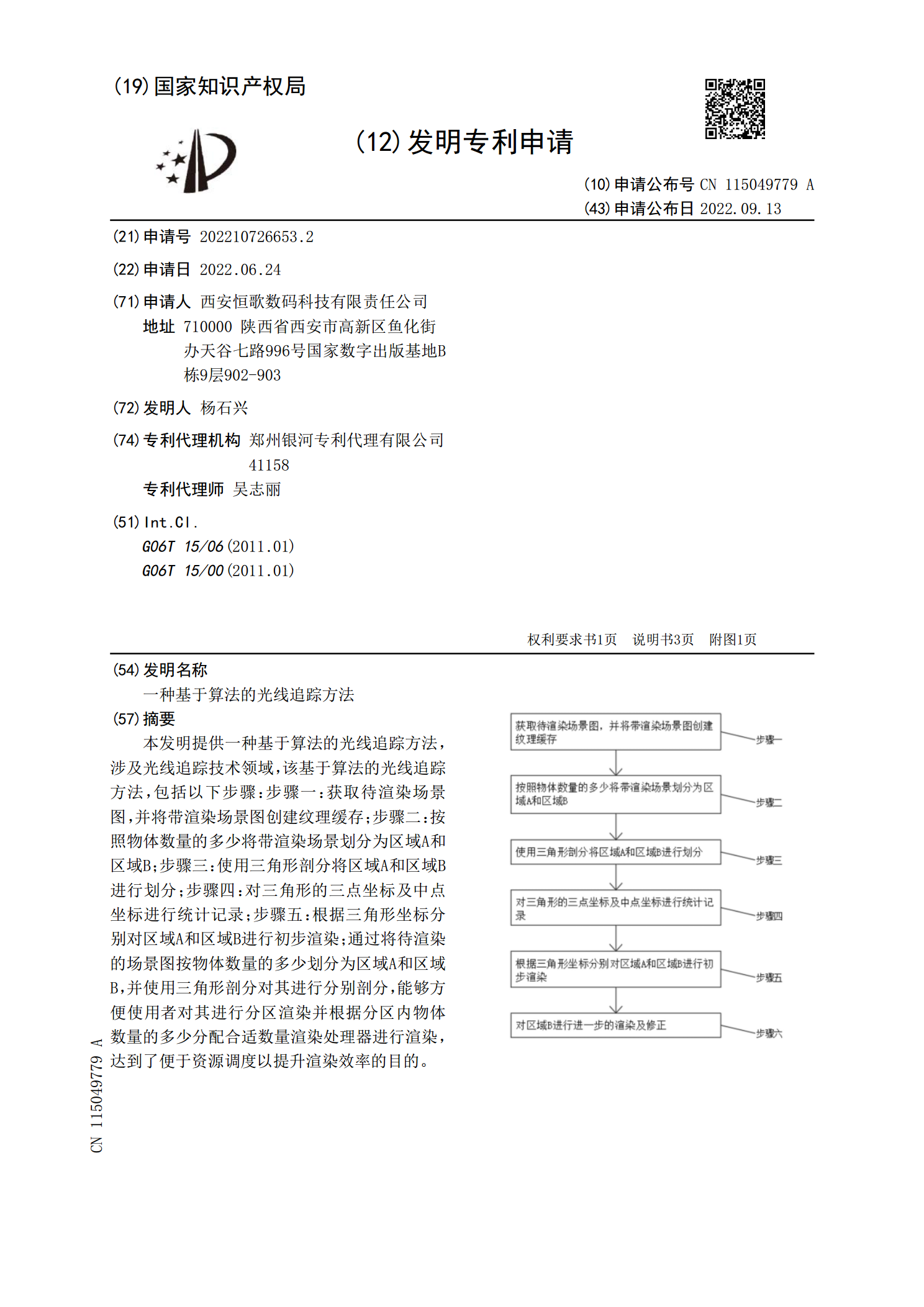
本发明提供一种基于算法的光线追踪方法,涉及光线追踪技术领域,该基于算法的光线追踪方法,包括以下步骤:步骤一:获取待渲染场景图,并将带渲染场景图创建纹理缓存;步骤二:按照物体数量的多少将带渲染场景划分为区域A和区域B;步骤三:使用三角形剖分将区域A和区域B进行划分;步骤四:对三角形的三点坐标及中点坐标进行统计记录;步骤五:根据三角形坐标分别对区域A和区域B进行初步渲染;通过将待渲染的场景图按物体数量的多少划分为区域A和区域B,并使用三角形剖分对其进行分别剖分,能够方便使用者对其进行分区渲染并根据分区内物体数

一种基于深度缓冲加速的光线追踪渲染方法.pdf
本发明公开了一种基于深度缓冲加速的光线追踪渲染方法,其技术方案要点是:包括光栅化和光线追踪;所述光栅化具体包括以下步骤:S1.建立图像Result、纹理Texture:建立图像Result用于保存最终图像,建立纹理Texture用于存储碰撞点位置与相应位置材质信息;S2.计算深度值:根据场景信息计算纹理Texture与图像Result中对应像素位置的深度值,并将深度值线性变换至[0,1]范围内;S3.处理图像中背景位置颜色:对于任意一个深度值为1的像素点,该深度值为超出距离上限的像素点,根据场景的背景处理
一种光线追踪渲染连续帧的去噪方法及系统.pdf
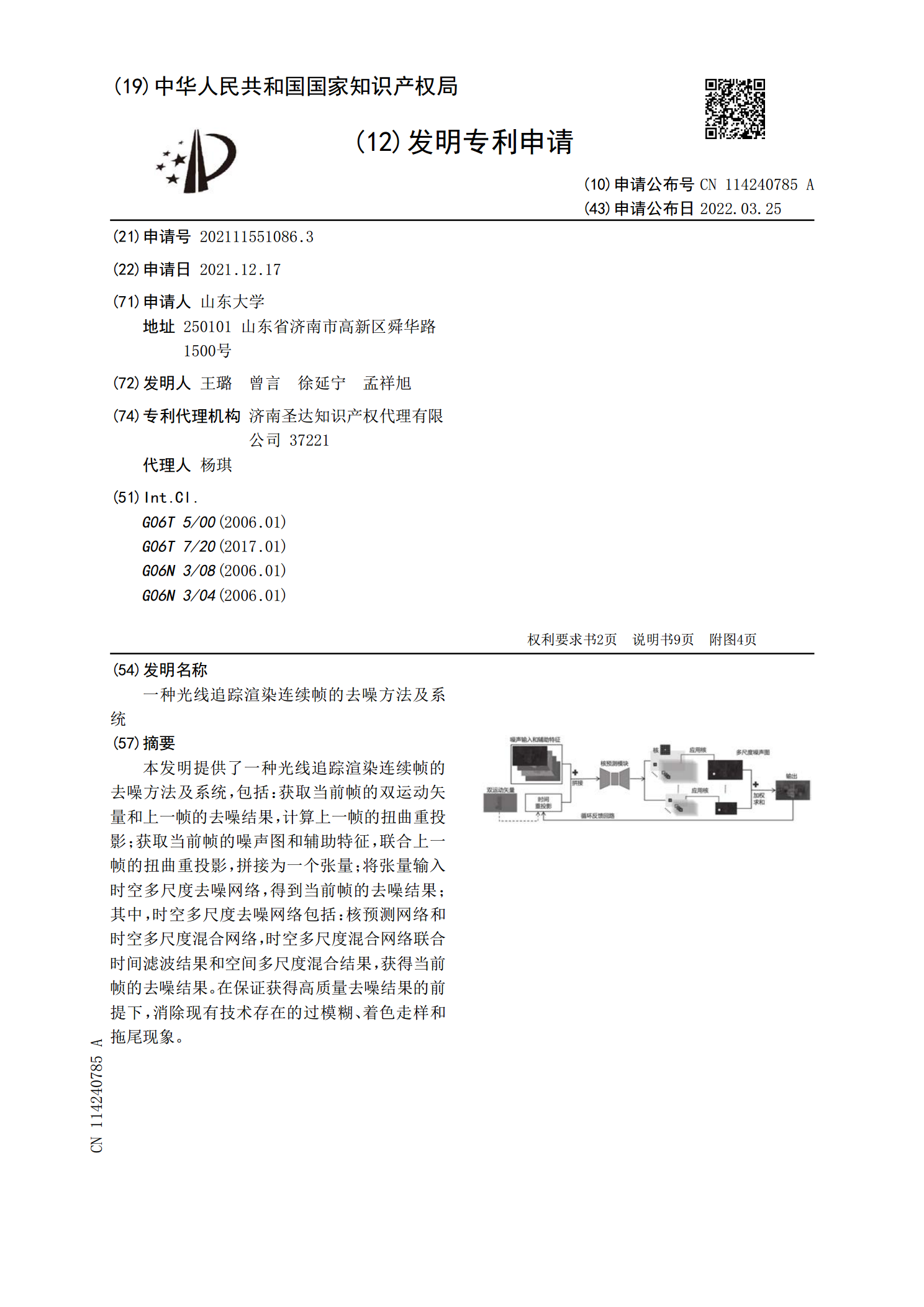
本发明提供了一种光线追踪渲染连续帧的去噪方法及系统,包括:获取当前帧的双运动矢量和上一帧的去噪结果,计算上一帧的扭曲重投影;获取当前帧的噪声图和辅助特征,联合上一帧的扭曲重投影,拼接为一个张量;将张量输入时空多尺度去噪网络,得到当前帧的去噪结果;其中,时空多尺度去噪网络包括:核预测网络和时空多尺度混合网络,时空多尺度混合网络联合时间滤波结果和空间多尺度混合结果,获得当前帧的去噪结果。在保证获得高质量去噪结果的前提下,消除现有技术存在的过模糊、着色走样和拖尾现象。