
一种飞行器避障路径规划的方法.pdf

St****36


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种飞行器避障路径规划的方法.pdf
本发明公开了一种飞行器避障路径规划的方法,它涉及路径规划技术领域。其步骤为:根据划定范围、旋转角度、行距,生成无障碍情况下的路径轨迹数据;在圈定地块内增加障碍物,轨迹做相应调整:输入初始轨迹点,循环遍历轨迹点两两判断,是否与障碍物有相交的情况:若无相交,重复判断相交情况;若有相交,分别计算当前两点连线与障碍物各边的交点,记录,并根据航线方向,修正避障航线;遍历结束,根据修正航线,重新渲染航线图,逻辑结束。本发明在实现路径规划设置过程中,能够设定一个或多个障碍物,并规划路径能够绕过这些障碍物,具备避障功能,

一种扭曲空间的避障路径规划方法.pdf
本发明公开了一种扭曲空间的避障路径规划方法,其包括如下步骤:建立构形空间的障碍物地图;将构形空间的障碍物进行降维坍缩,生成无障碍物的扭曲空间;在扭曲空间中用直线连接起点与终点,还原回构形空间得到初始路径;对初始路径进行局部裁剪优化得到最终的优化路径。本发明能够快速生成一条从起点到终点的避障路径,计算效率明显优于A*等传统路径规划方法,同时路径长度较优,本发明将障碍物坍缩的方式能够高效处理各类复杂障碍物的情况,且适用于任意高维地图。
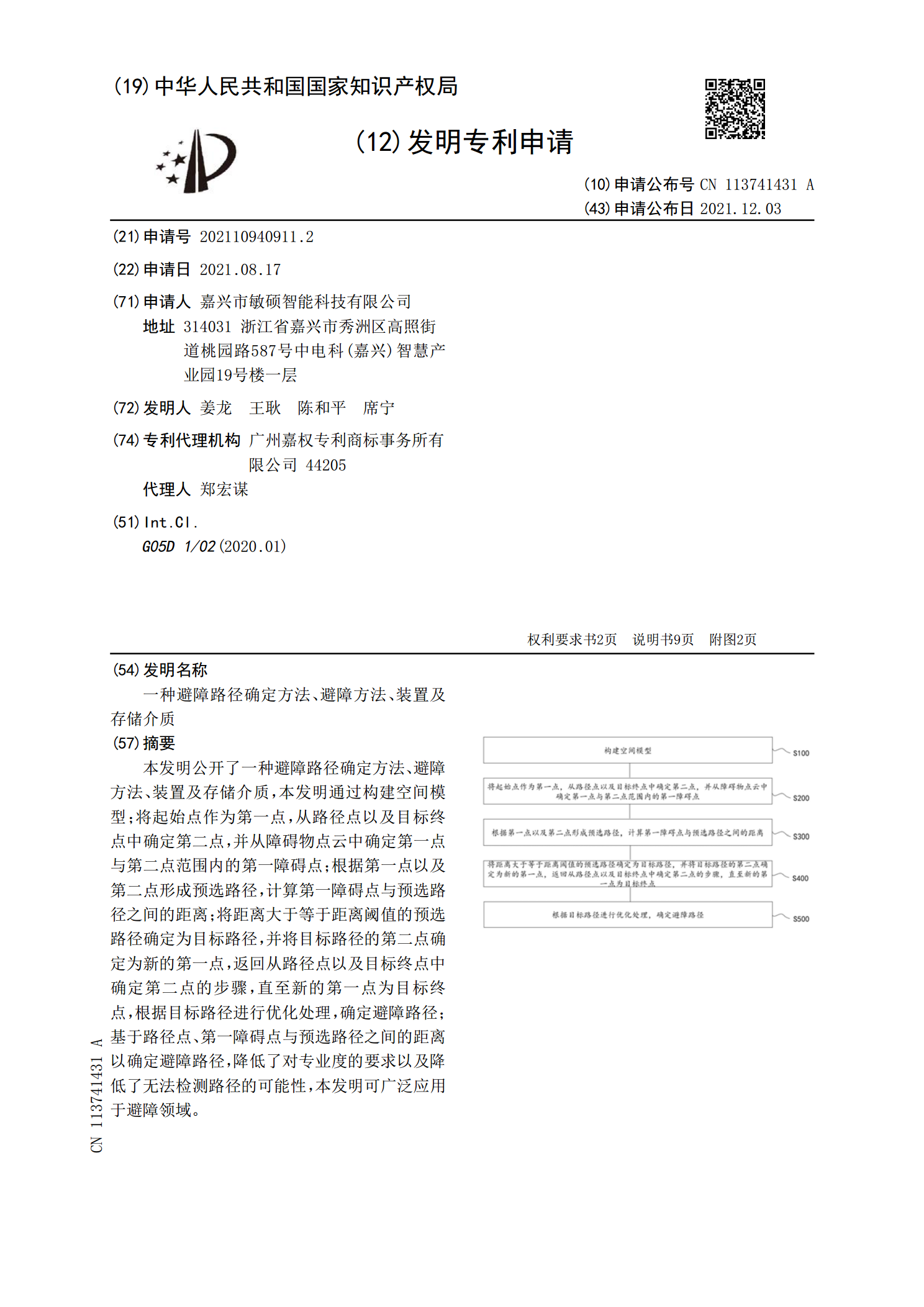
一种避障路径确定方法、避障方法、装置及存储介质.pdf
本发明公开了一种避障路径确定方法、避障方法、装置及存储介质,本发明通过构建空间模型;将起始点作为第一点,从路径点以及目标终点中确定第二点,并从障碍物点云中确定第一点与第二点范围内的第一障碍点;根据第一点以及第二点形成预选路径,计算第一障碍点与预选路径之间的距离;将距离大于等于距离阈值的预选路径确定为目标路径,并将目标路径的第二点确定为新的第一点,返回从路径点以及目标终点中确定第二点的步骤,直至新的第一点为目标终点,根据目标路径进行优化处理,确定避障路径;基于路径点、第一障碍点与预选路径之间的距离以确定避障

一种用于视障人士导盲的路径规划与避障方法.pdf
本发明公开一种用于视障人士导盲的路径规划与避障方法,运用机器视觉和人工智能技术对环境进行3D建模,对环境中的静态和动态障碍物进行检测和识别,获取障碍物所在区域,并计算出相对视障人士的距离和方位,采用九方格地图进行有效行走路径规划,通过语音播报前方路况信息,提示视障人士行走与避障;本发明能在动态环境下,感知环境中障碍物的空间位置,规划出供视障人士行走的路线,为视障人士的出行提供方便。
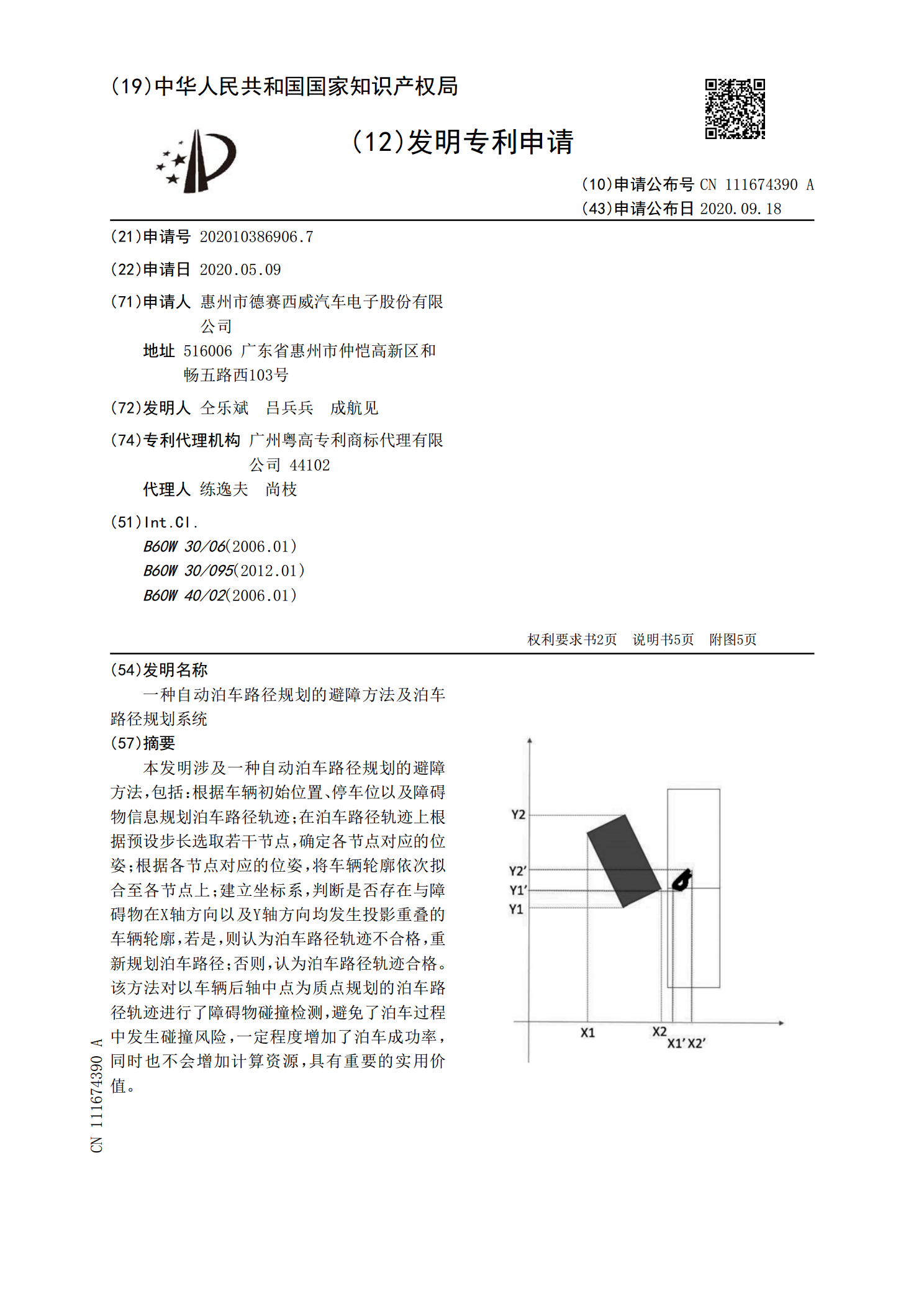
一种自动泊车路径规划的避障方法及泊车路径规划系统.pdf
本发明涉及一种自动泊车路径规划的避障方法,包括:根据车辆初始位置、停车位以及障碍物信息规划泊车路径轨迹;在泊车路径轨迹上根据预设步长选取若干节点,确定各节点对应的位姿;根据各节点对应的位姿,将车辆轮廓依次拟合至各节点上;建立坐标系,判断是否存在与障碍物在X轴方向以及Y轴方向均发生投影重叠的车辆轮廓,若是,则认为泊车路径轨迹不合格,重新规划泊车路径;否则,认为泊车路径轨迹合格。该方法对以车辆后轴中点为质点规划的泊车路径轨迹进行了障碍物碰撞检测,避免了泊车过程中发生碰撞风险,一定程度增加了泊车成功率,同时也不