
一种机械臂抓取方案的生成方法及装置.pdf

羽沫****魔王


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机械臂抓取方案的生成方法及装置.pdf
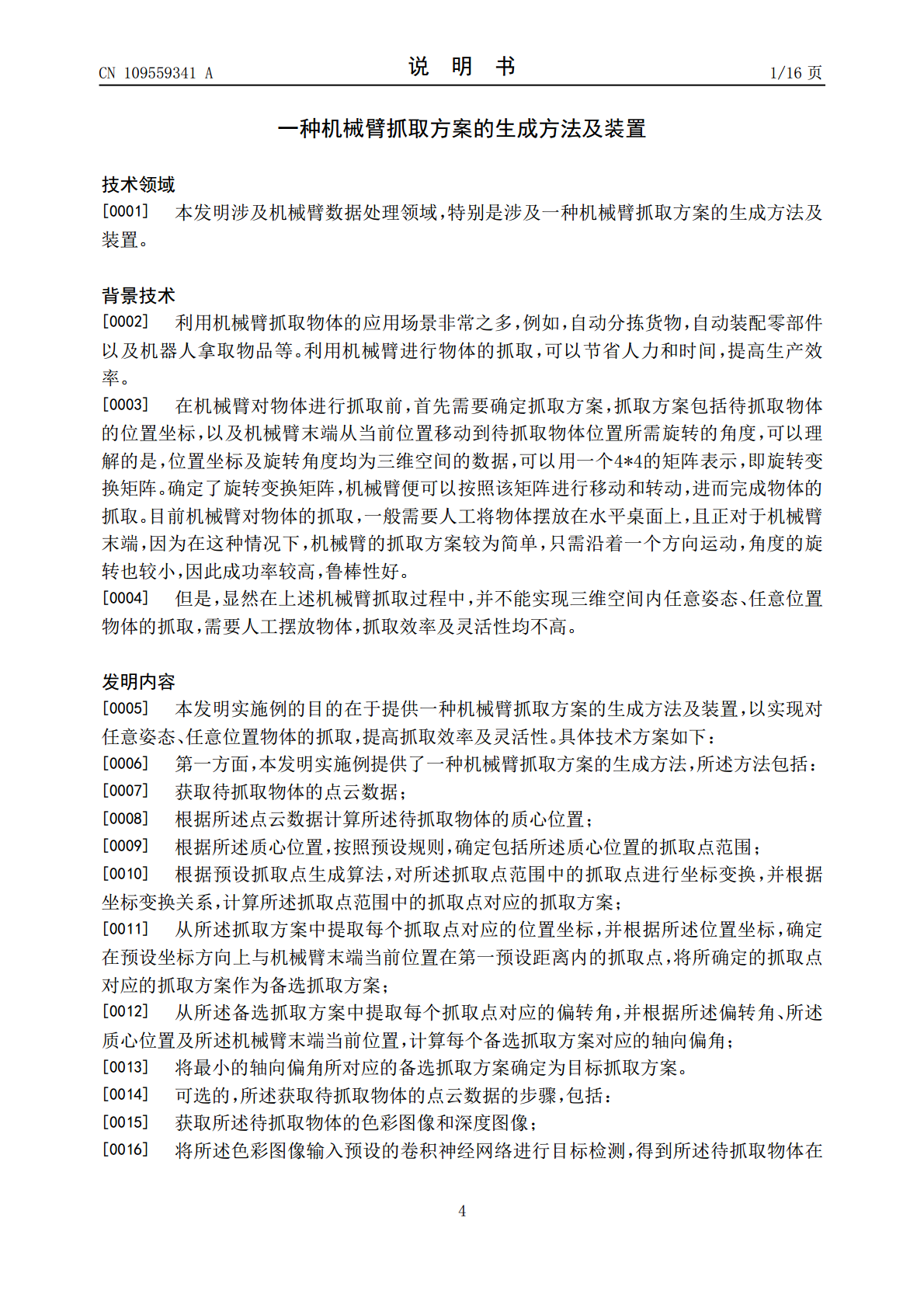
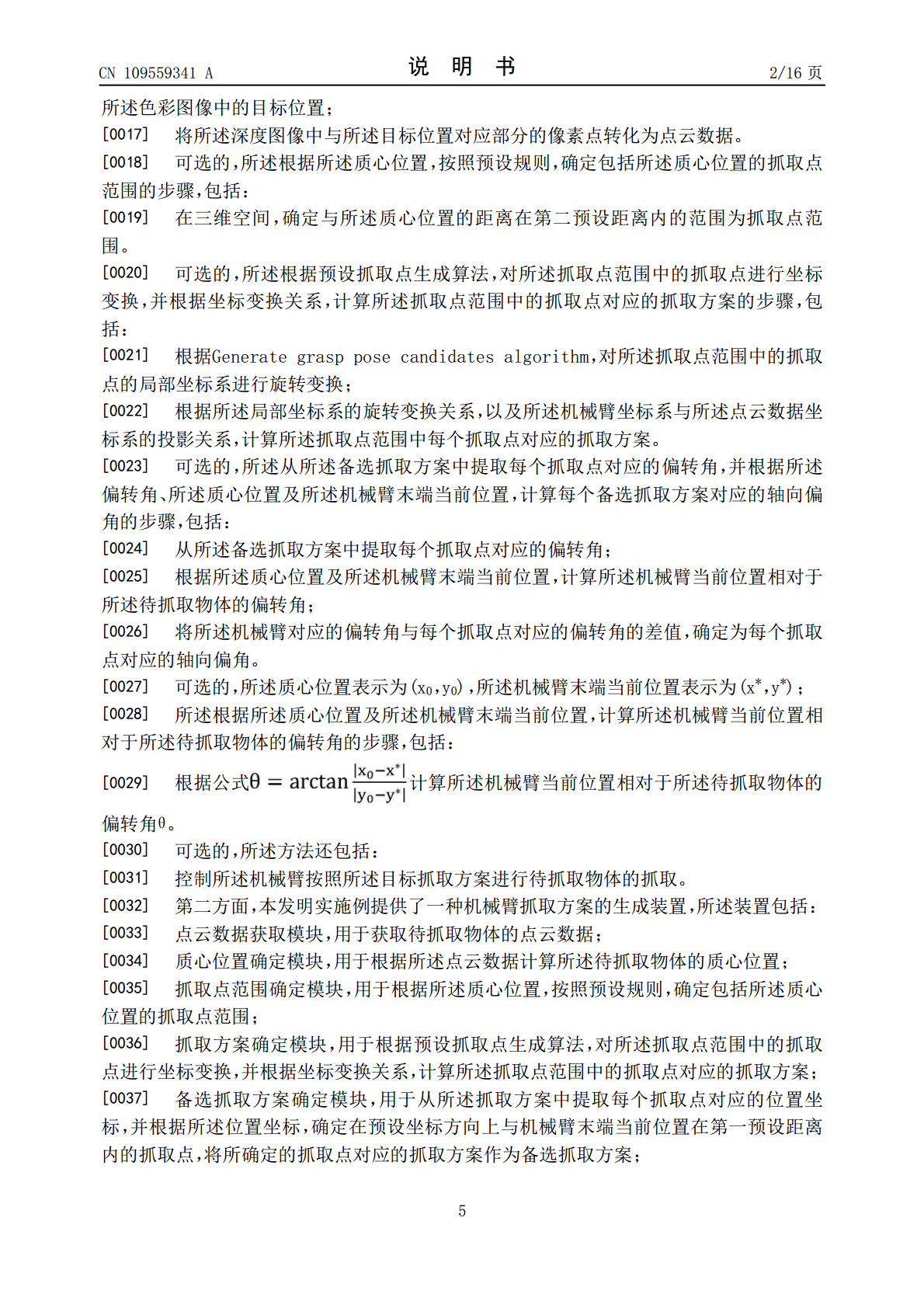
本发明实施例提供了一种机械臂抓取方案的生成方法及装置,所述方法包括:获取待抓取物体的点云数据,计算待抓取物体的质心位置;根据质心位置,按照预设规则,确定抓取点范围;根据预设抓取点生成算法,计算抓取点范围中的抓取点对应的抓取方案;提取每个抓取点对应的位置坐标,并确定在预设坐标方向上与机械臂末端当前位置在第一预设距离内的抓取点,确定备选抓取方案;提取每个抓取点对应的偏转角,计算每个备选抓取方案对应的轴向偏角;将最小的轴向偏角所对应的备选抓取方案确定为目标抓取方案。可以实现对任意姿态、任意位置物体的抓取,抓取效
一种控制机械臂抓取物体的方法及装置.pdf
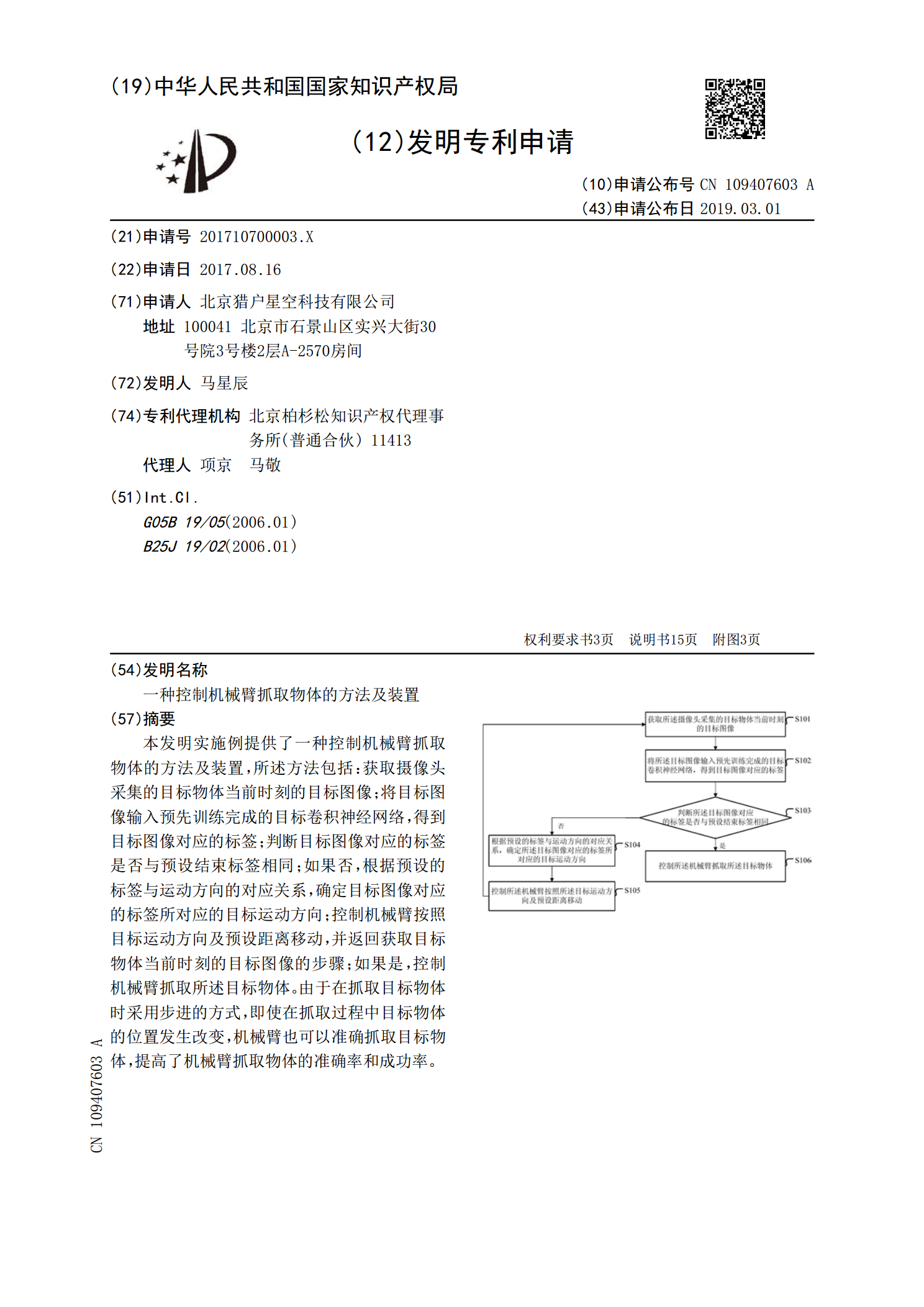
本发明实施例提供了一种控制机械臂抓取物体的方法及装置,所述方法包括:获取摄像头采集的目标物体当前时刻的目标图像;将目标图像输入预先训练完成的目标卷积神经网络,得到目标图像对应的标签;判断目标图像对应的标签是否与预设结束标签相同;如果否,根据预设的标签与运动方向的对应关系,确定目标图像对应的标签所对应的目标运动方向;控制机械臂按照目标运动方向及预设距离移动,并返回获取目标物体当前时刻的目标图像的步骤;如果是,控制机械臂抓取所述目标物体。由于在抓取目标物体时采用步进的方式,即使在抓取过程中目标物体的位置发生改
一种机械臂及其抓取装置.pdf
本发明的一种机械臂及其抓取装置,包括至少两根操作手指,所述操作手指包括第一连杆、第二连杆及第三连杆;所述第一连杆的一端与第二连杆的一端均与第三连杆的一端连接,所述第三连杆另一端为自由端;所述第一连杆的另一端与主电机驱动的传动杆及传动螺母底座连接,所述第二连杆通过连杆座与独立电机驱动的锥齿轮传动副连接。本发明可以使复杂形态的重物抓取更加灵活稳定,大大提高了抓取装置对于复杂形态物体的抓取能力以及环境自适应能力。
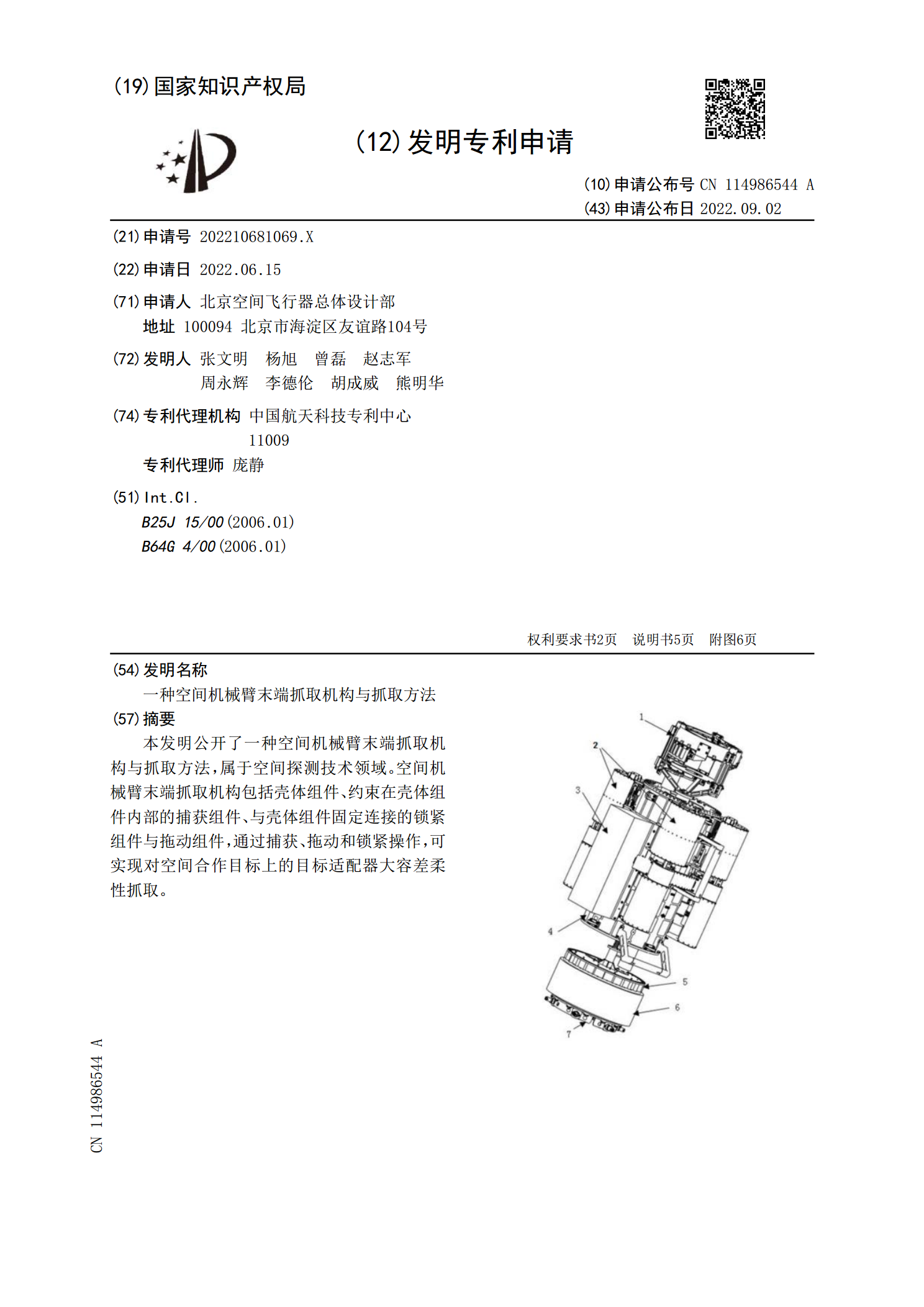
一种空间机械臂末端抓取机构与抓取方法.pdf
本发明公开了一种空间机械臂末端抓取机构与抓取方法,属于空间探测技术领域。空间机械臂末端抓取机构包括壳体组件、约束在壳体组件内部的捕获组件、与壳体组件固定连接的锁紧组件与拖动组件,通过捕获、拖动和锁紧操作,可实现对空间合作目标上的目标适配器大容差柔性抓取。
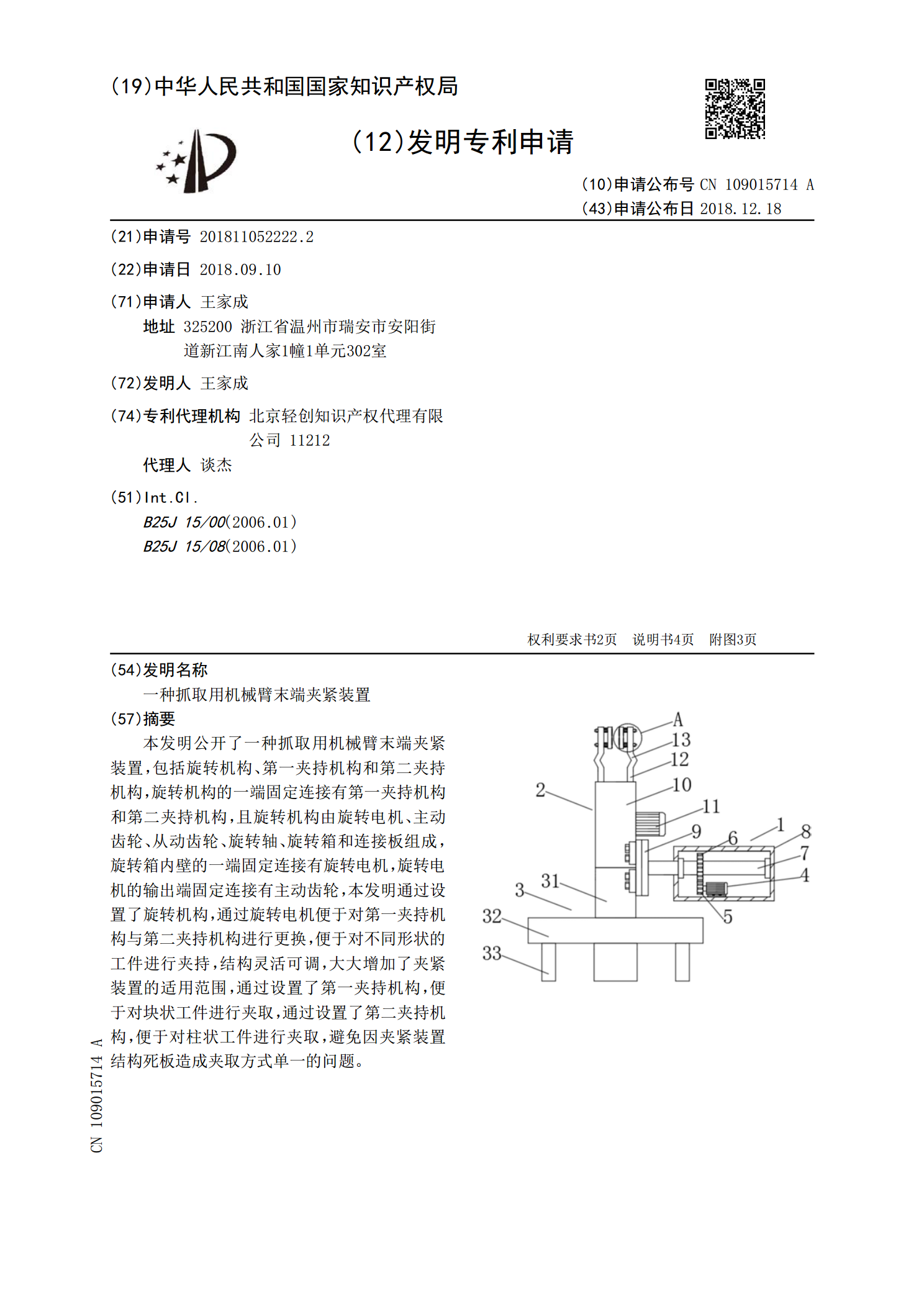
一种抓取用机械臂末端夹紧装置.pdf
本发明公开了一种抓取用机械臂末端夹紧装置,包括旋转机构、第一夹持机构和第二夹持机构,旋转机构的一端固定连接有第一夹持机构和第二夹持机构,且旋转机构由旋转电机、主动齿轮、从动齿轮、旋转轴、旋转箱和连接板组成,旋转箱内壁的一端固定连接有旋转电机,旋转电机的输出端固定连接有主动齿轮,本发明通过设置了旋转机构,通过旋转电机便于对第一夹持机构与第二夹持机构进行更换,便于对不同形状的工件进行夹持,结构灵活可调,大大增加了夹紧装置的适用范围,通过设置了第一夹持机构,便于对块状工件进行夹取,通过设置了第二夹持机构,便于对