
多机器人协同服务方法、装置、控制设备及系统.pdf

丹烟****魔王

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多机器人协同服务方法、装置、控制设备及系统.pdf
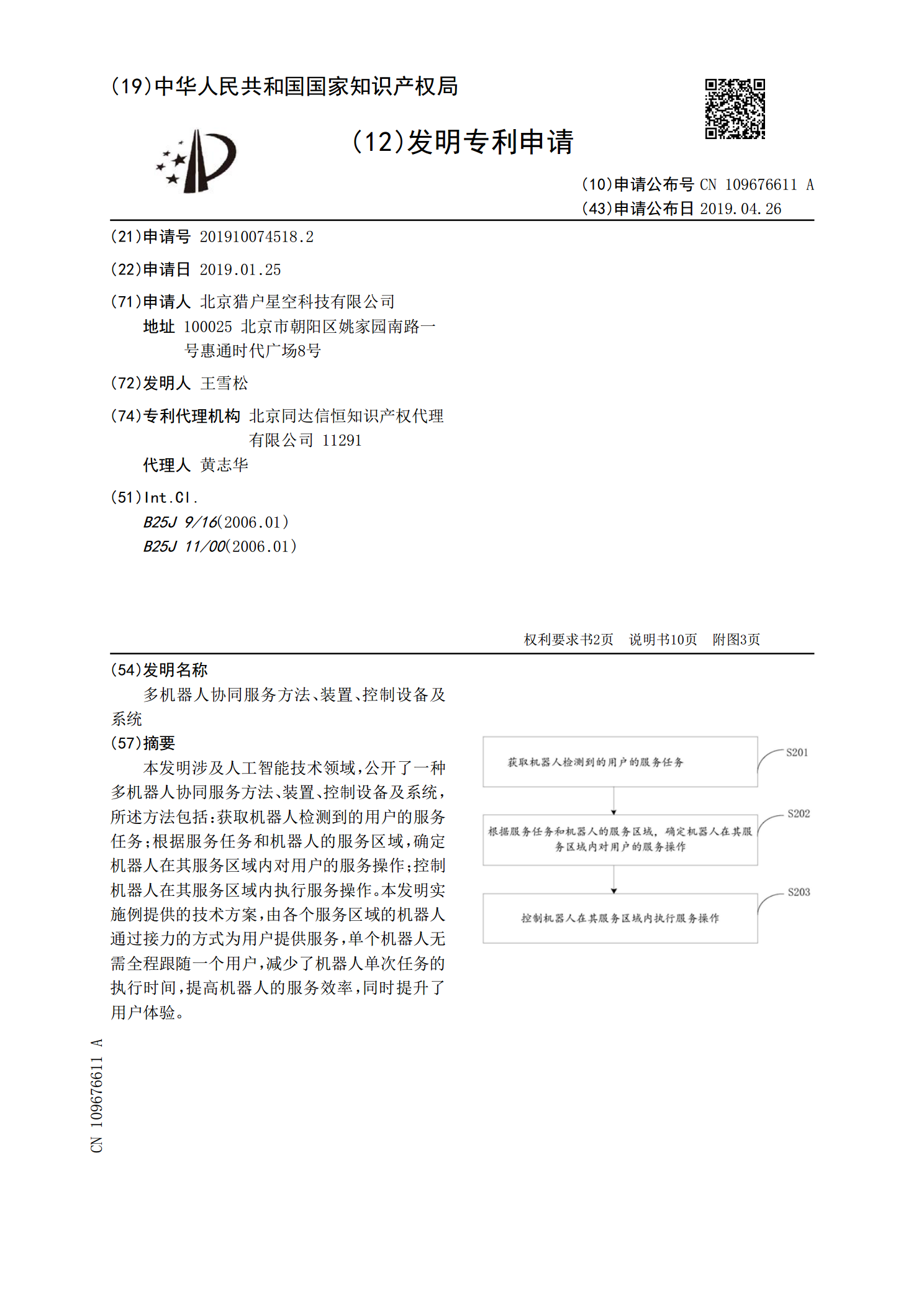
本发明涉及人工智能技术领域,公开了一种多机器人协同服务方法、装置、控制设备及系统,所述方法包括:获取机器人检测到的用户的服务任务;根据服务任务和机器人的服务区域,确定机器人在其服务区域内对用户的服务操作;控制机器人在其服务区域内执行服务操作。本发明实施例提供的技术方案,由各个服务区域的机器人通过接力的方式为用户提供服务,单个机器人无需全程跟随一个用户,减少了机器人单次任务的执行时间,提高机器人的服务效率,同时提升了用户体验。
多机器人协同控制系统.pdf
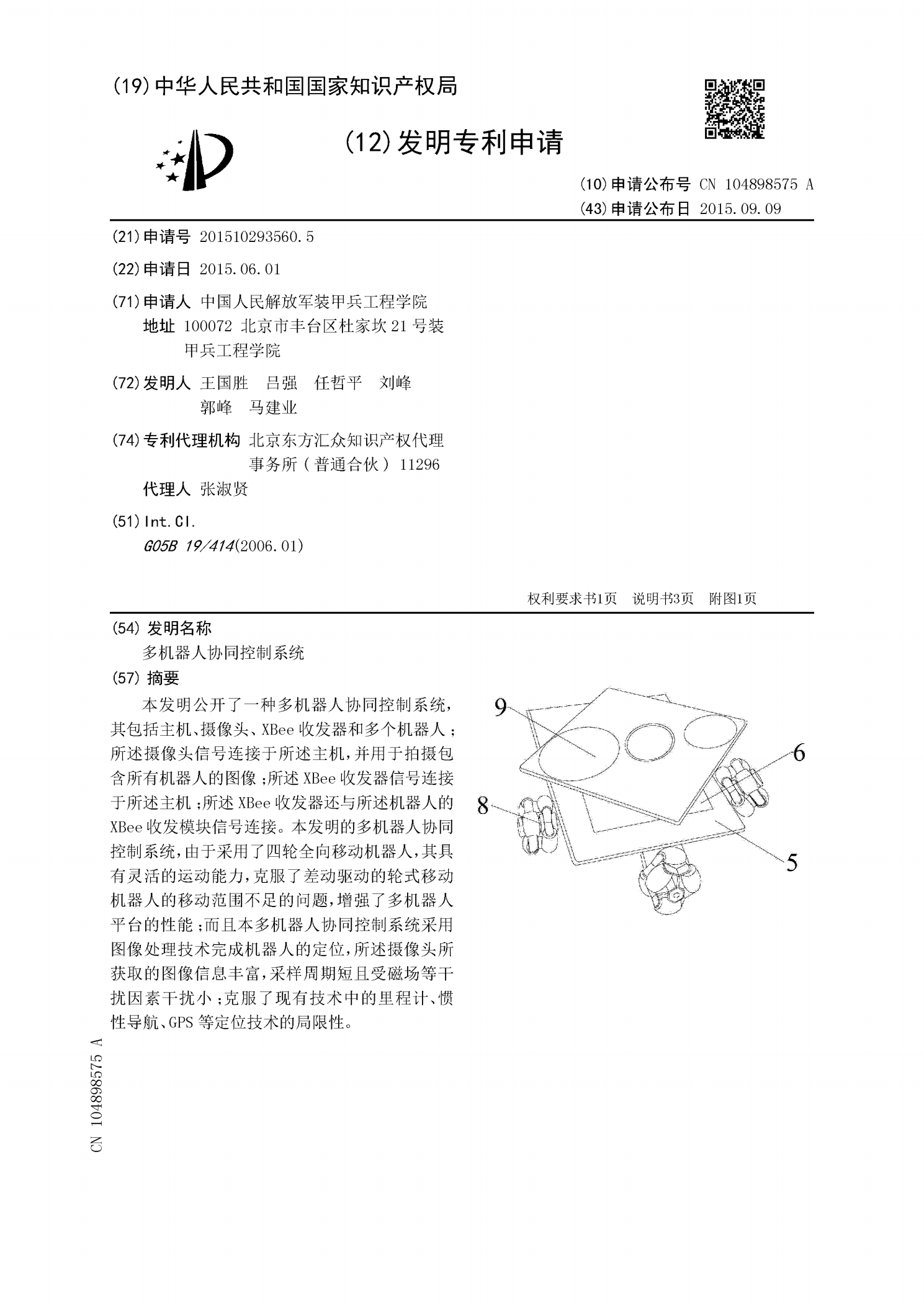
本发明公开了一种多机器人协同控制系统,其包括主机、摄像头、XBee收发器和多个机器人;所述摄像头信号连接于所述主机,并用于拍摄包含所有机器人的图像;所述XBee收发器信号连接于所述主机;所述XBee收发器还与所述机器人的XBee收发模块信号连接。本发明的多机器人协同控制系统,由于采用了四轮全向移动机器人,其具有灵活的运动能力,克服了差动驱动的轮式移动机器人的移动范围不足的问题,增强了多机器人平台的性能;而且本多机器人协同控制系统采用图像处理技术完成机器人的定位,所述摄像头所获取的图像信息丰富,采样周期短且
多机器人协同控制系统.pdf
多物料协同滴加的控制方法、系统及设备.pdf
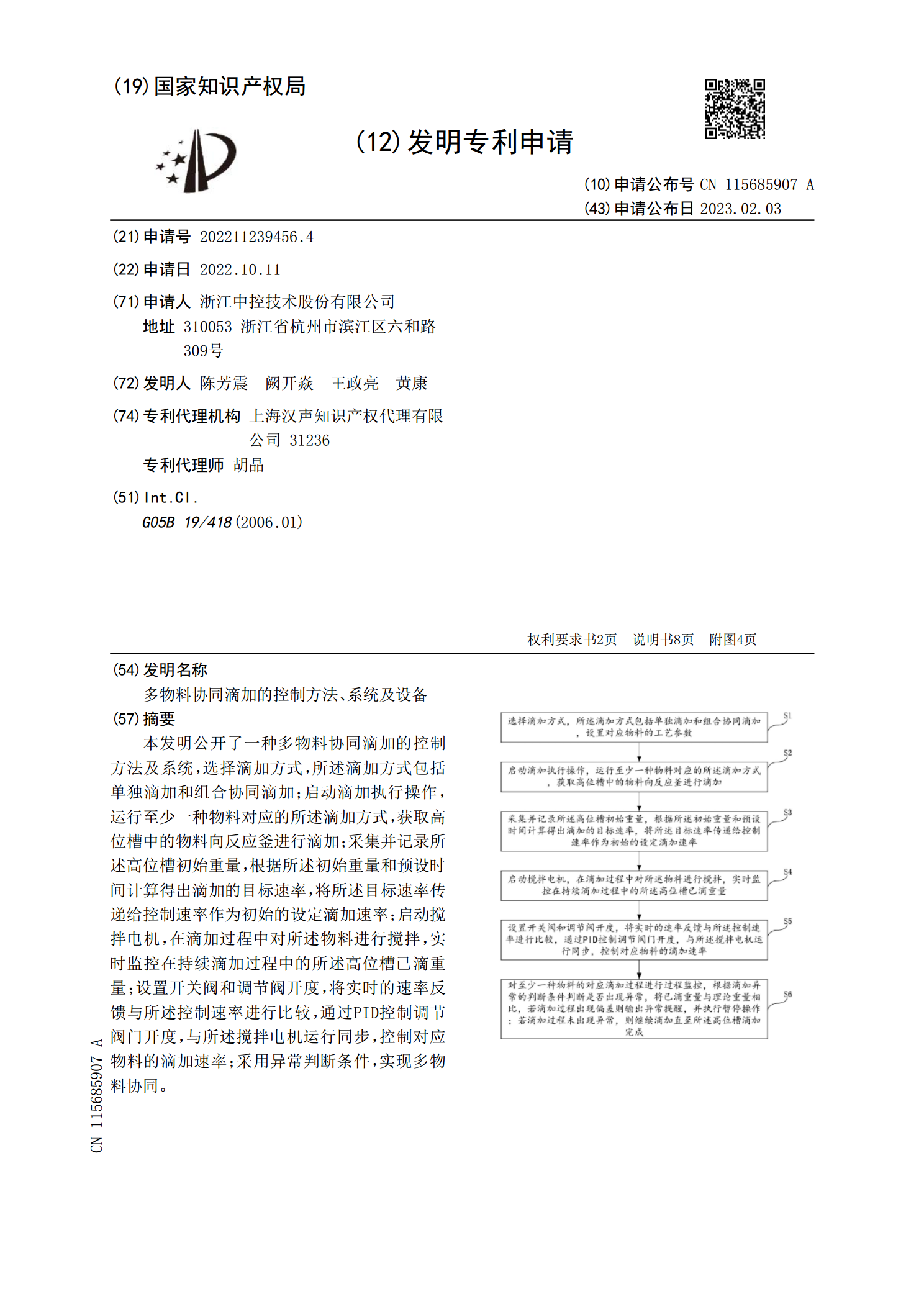
本发明公开了一种多物料协同滴加的控制方法及系统,选择滴加方式,所述滴加方式包括单独滴加和组合协同滴加;启动滴加执行操作,运行至少一种物料对应的所述滴加方式,获取高位槽中的物料向反应釜进行滴加;采集并记录所述高位槽初始重量,根据所述初始重量和预设时间计算得出滴加的目标速率,将所述目标速率传递给控制速率作为初始的设定滴加速率;启动搅拌电机,在滴加过程中对所述物料进行搅拌,实时监控在持续滴加过程中的所述高位槽已滴重量;设置开关阀和调节阀开度,将实时的速率反馈与所述控制速率进行比较,通过PID控制调节阀门开度,与

控制多机器人系统进行回充的方法、装置及多机器人系统.pdf
本发明提供的方法包括控制第一机器人沿第一目标充电桩所在的方向运动,判断所述第一机器人在运动至第一预设位置后能否接收所述第一目标充电桩发出的第一回充信号,若能够接收所述第一回充信号,则控制所述第一机器人从所述第一预设位置运动至所述第一目标充电桩上进行充电,其中所述第一目标充电桩在被所述第一机器人使用后停止对外发出回充信号,控制所述第二机器人按照所述第一机器人的运动方式运动至第二目标充电桩上进行充电,其中所述第二机器人为所述多机器人系统中除所述第一机器人以外的其它至少一台机器人。