
多机器人协同控制系统.pdf

文库****品店

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多机器人协同控制系统.pdf
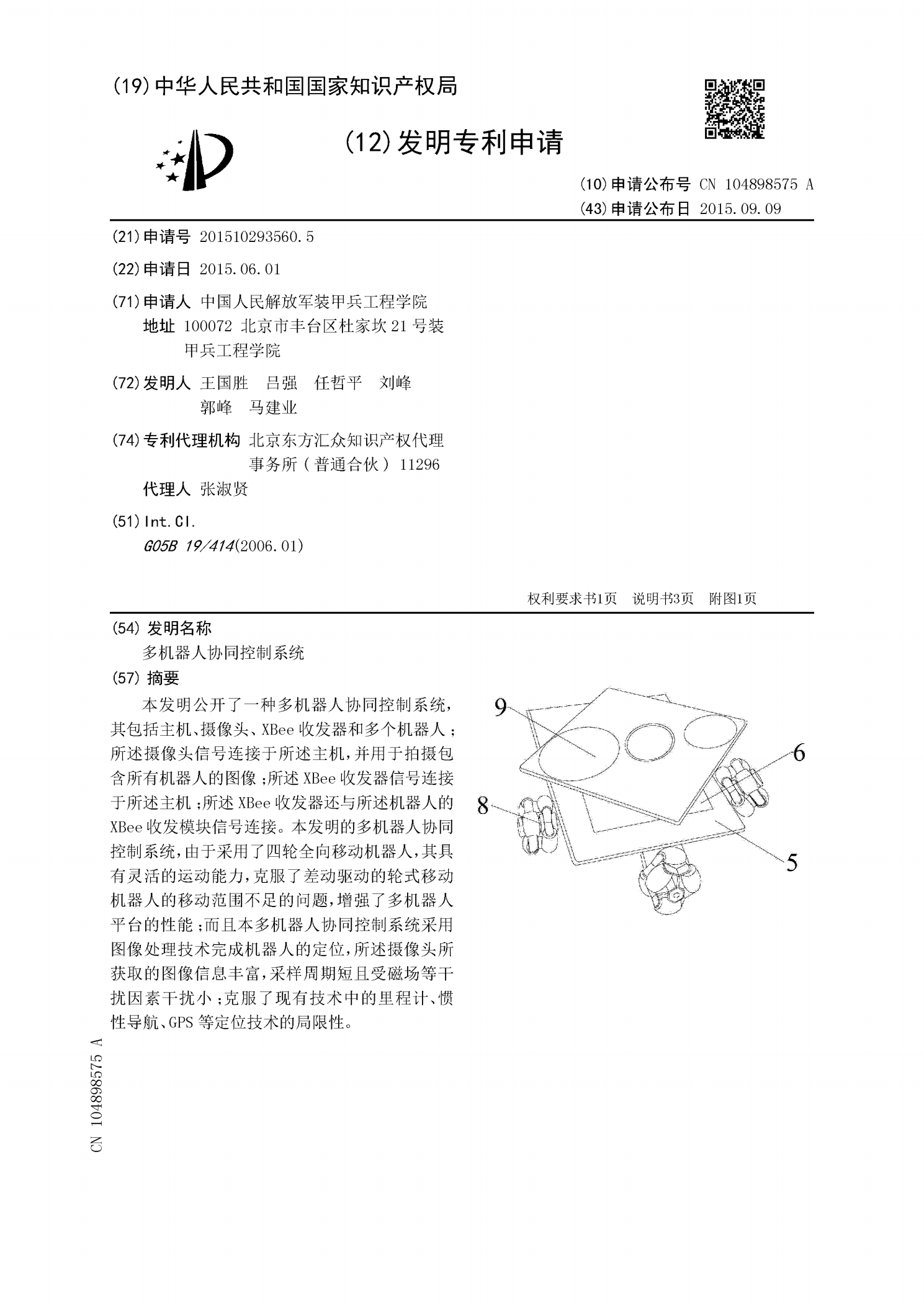
本发明公开了一种多机器人协同控制系统,其包括主机、摄像头、XBee收发器和多个机器人;所述摄像头信号连接于所述主机,并用于拍摄包含所有机器人的图像;所述XBee收发器信号连接于所述主机;所述XBee收发器还与所述机器人的XBee收发模块信号连接。本发明的多机器人协同控制系统,由于采用了四轮全向移动机器人,其具有灵活的运动能力,克服了差动驱动的轮式移动机器人的移动范围不足的问题,增强了多机器人平台的性能;而且本多机器人协同控制系统采用图像处理技术完成机器人的定位,所述摄像头所获取的图像信息丰富,采样周期短且
多机器人协同控制系统.pdf

多足机器人多关节协同控制系统的研究的开题报告.docx
多足机器人多关节协同控制系统的研究的开题报告一、研究背景近年来,随着自动化技术的不断发展,多足机器人逐渐在各个领域得到了广泛的应用。多足机器人具有多足、多关节的特点,能够在各种地形和环境下运动,具有很高的灵活性和适应性。但是,多足机器人的控制系统却面临很大的挑战,主要包括多关节之间的协同控制、足底力的分配以及非线性和非稳定系统的控制等方面。为了实现多足机器人的高效运动和控制,需要研究多关节协同控制系统。多关节协同控制系统是多足机器人控制系统的重要组成部分,主要包括动力学建模、控制策略设计、控制器实现和验证

多移动机器人协同运动控制系统的研究与实现的开题报告.docx
多移动机器人协同运动控制系统的研究与实现的开题报告一、研究背景与意义随着现代工业自动化的发展,多移动机器人的应用越来越广泛。多移动机器人在工业生产中可以实现多工位协同作业,提高生产效率;在医疗领域中可以实现远程手术操作,帮助医生完成高难度的手术;在救援领域中可以实现协同搜救,提高救援效率等。因此,多移动机器人的协同运动控制成为其应用研究的一个重要方向,也是一个具有挑战性的问题。多移动机器人之间的协同运动控制需要考虑各个机器人的相对位置和运动状态,以及它们之间的通信和协调,因此需要一个完整的系统来实现对它们

一种多轮式机器人自适应协同控制算法及控制系统.pdf
本发明公开了一种多轮式机器人自适应协同控制算法及控制系统,该控制算法包含以下步骤:步骤1:建立含有N个轮式机器人的多轮式机器人系统及单个轮式机器人的非线性动力学模型;步骤2:经过线性反馈变换,将轮式机器人的非线性动力学模型转化为二阶线性系统,并设计自适应协同控制器;步骤3:设计出自适应协同控制器后,通过反变换获得加速度和角加速度的演化规律,并进一步获得加速度和角加速度,进而获得对应的控制力和控制力矩,完成多个轮式机器人自适应协同控制。本发明可以有效克服系统结构和参数不确定的非线性项,自动更新不同机器人通信