
定位方法、装置、自移动设备和存储介质.pdf

康佳****文库


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位方法、装置、自移动设备和存储介质.pdf
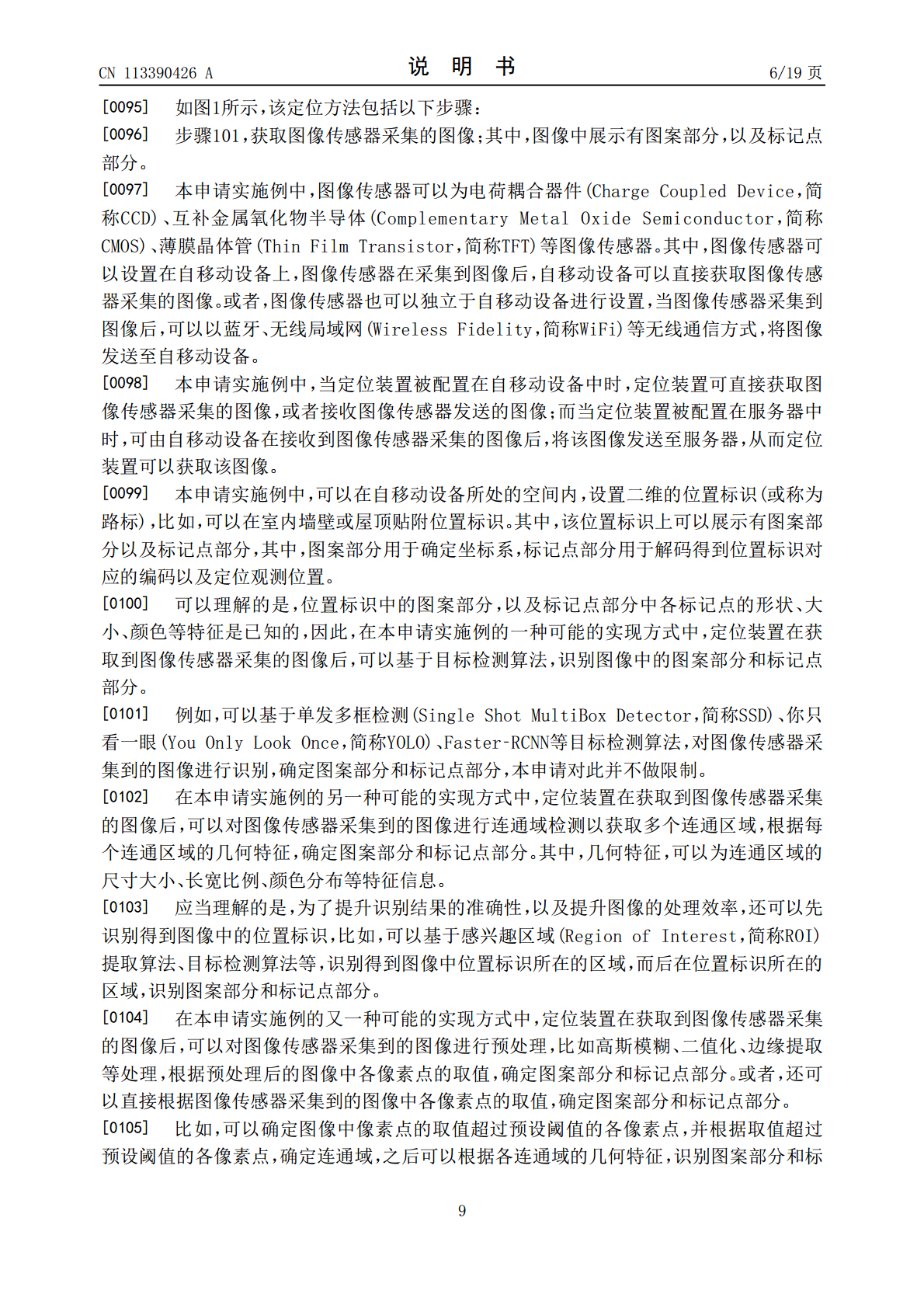
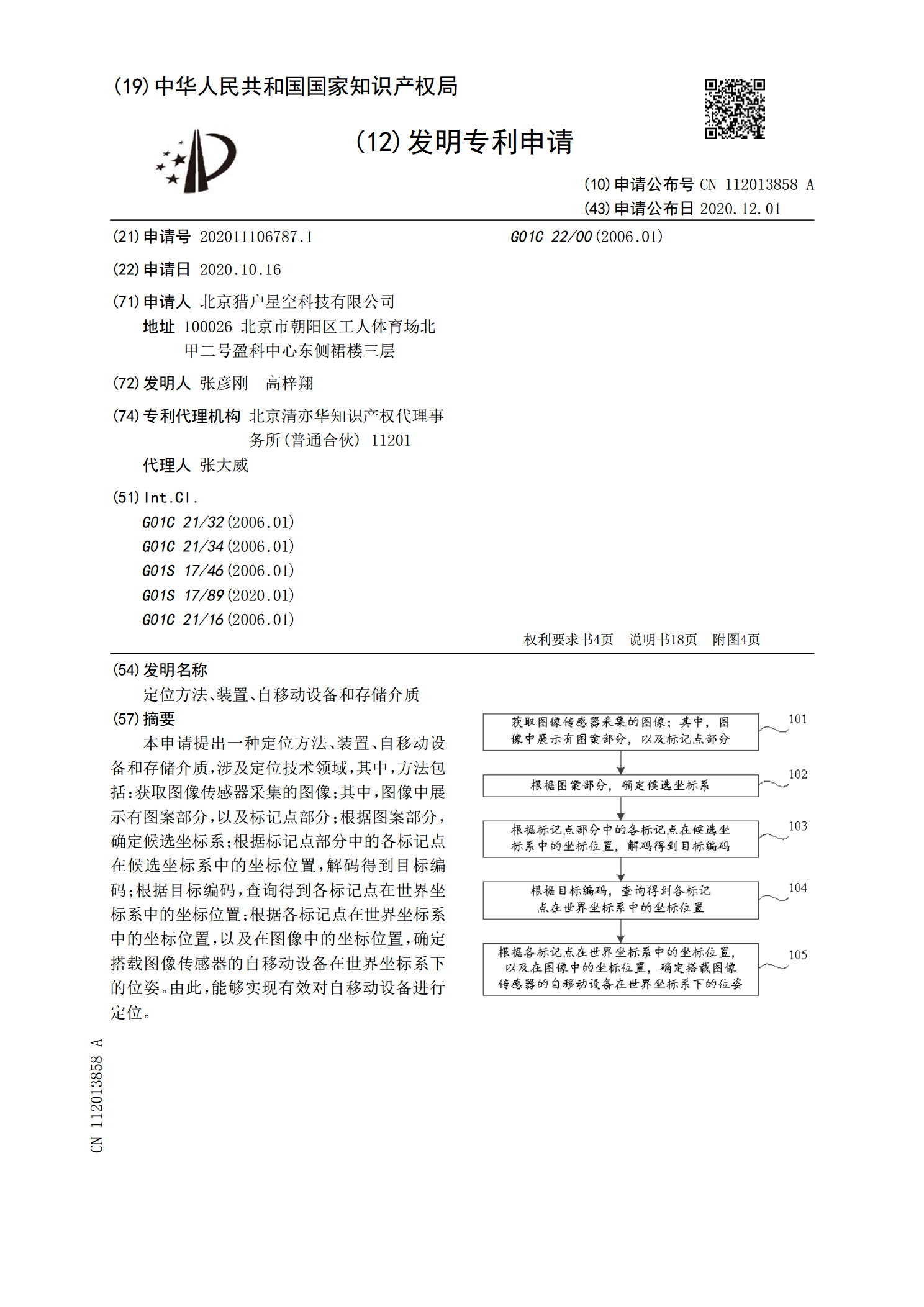
本申请提出一种定位方法、装置、自移动设备和存储介质,涉及定位技术领域,其中,方法包括:获取图像传感器采集的图像;其中,图像中展示有图案部分,以及标记点部分;根据图案部分,确定候选坐标系;根据标记点部分中的各标记点在候选坐标系中的坐标位置,解码得到目标编码;根据目标编码,查询得到各标记点在世界坐标系中的坐标位置;根据各标记点在世界坐标系中的坐标位置,以及在图像中的坐标位置,确定搭载图像传感器的自移动设备在世界坐标系下的位姿。由此,能够实现有效对自移动设备进行定位。
定位方法、装置、自移动设备和存储介质.pdf
本申请提出一种定位方法、装置、自移动设备和存储介质,涉及定位技术领域,其中,方法包括:获取图像传感器采集的图像;其中,图像中展示有图案部分,以及标记点部分;根据图案部分,确定候选坐标系;根据标记点部分中的各标记点在候选坐标系中的坐标位置,解码得到目标编码;根据目标编码,查询得到各标记点在世界坐标系中的坐标位置;根据各标记点在世界坐标系中的坐标位置,以及在图像中的坐标位置,确定搭载图像传感器的自移动设备在世界坐标系下的位姿。由此,能够实现有效对自移动设备进行定位。

定位方法、装置、自移动设备和存储介质.pdf
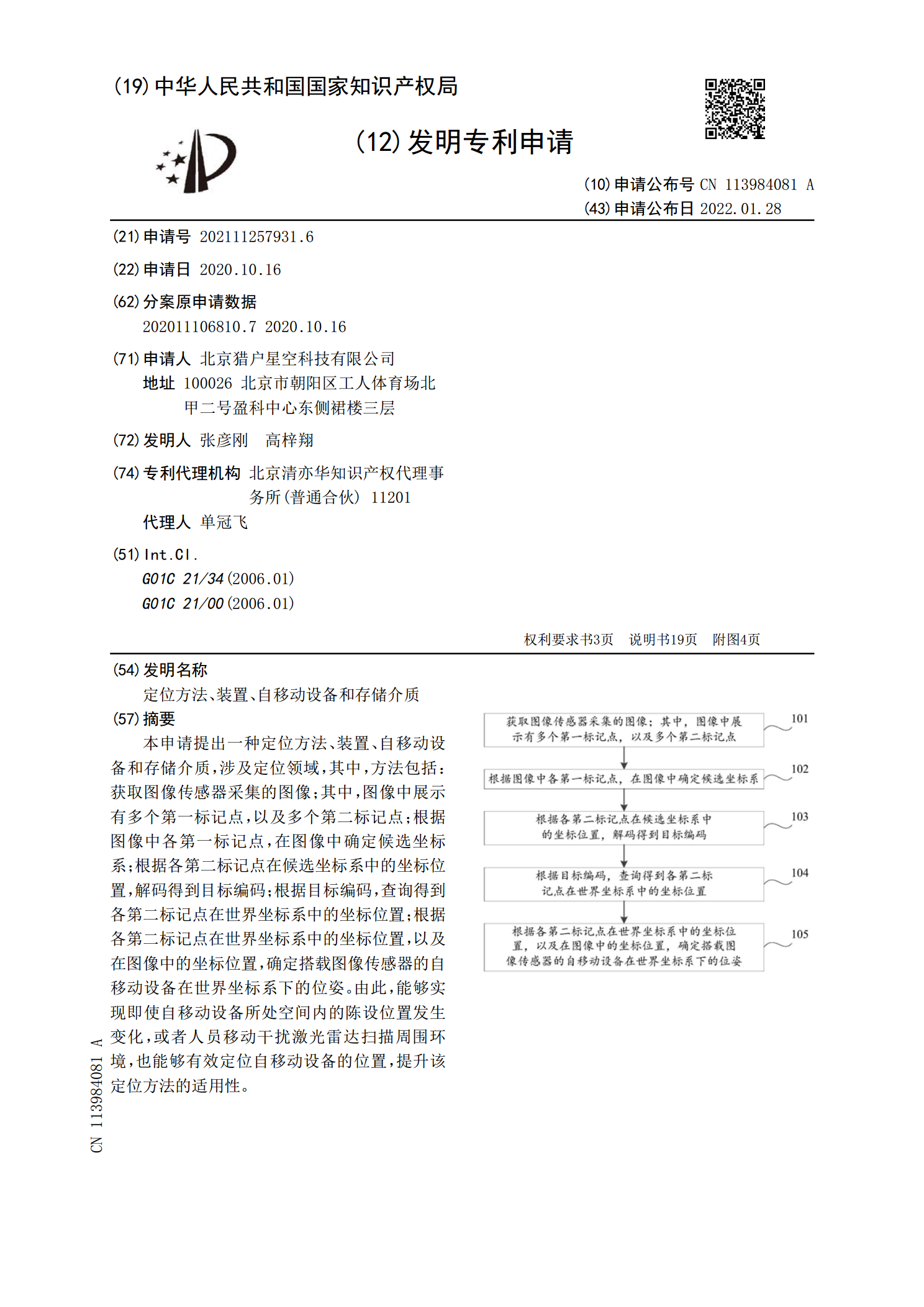
本申请提出一种定位方法、装置、自移动设备和存储介质,涉及定位领域,其中,方法包括:获取图像传感器采集的图像;其中,图像中展示有多个第一标记点,以及多个第二标记点;根据图像中各第一标记点,在图像中确定候选坐标系;根据各第二标记点在候选坐标系中的坐标位置,解码得到目标编码;根据目标编码,查询得到各第二标记点在世界坐标系中的坐标位置;根据各第二标记点在世界坐标系中的坐标位置,以及在图像中的坐标位置,确定搭载图像传感器的自移动设备在世界坐标系下的位姿。由此,能够实现即使自移动设备所处空间内的陈设位置发生变化,或者
定位方法、装置、自移动设备和存储介质.pdf
本申请提出一种定位方法、装置、自移动设备和存储介质,涉及定位领域,其中,方法包括:获取图像传感器采集的图像;其中,图像中展示有多个第一标记点,以及多个第二标记点;根据图像中各第一标记点,在图像中确定候选坐标系;根据各第二标记点在候选坐标系中的坐标位置,解码得到目标编码;根据目标编码,查询得到各第二标记点在世界坐标系中的坐标位置;根据各第二标记点在世界坐标系中的坐标位置,以及在图像中的坐标位置,确定搭载图像传感器的自移动设备在世界坐标系下的位姿。由此,能够实现即使自移动设备所处空间内的陈设位置发生变化,或者
自移动设备定位方法、装置、存储介质、设备及系统.pdf
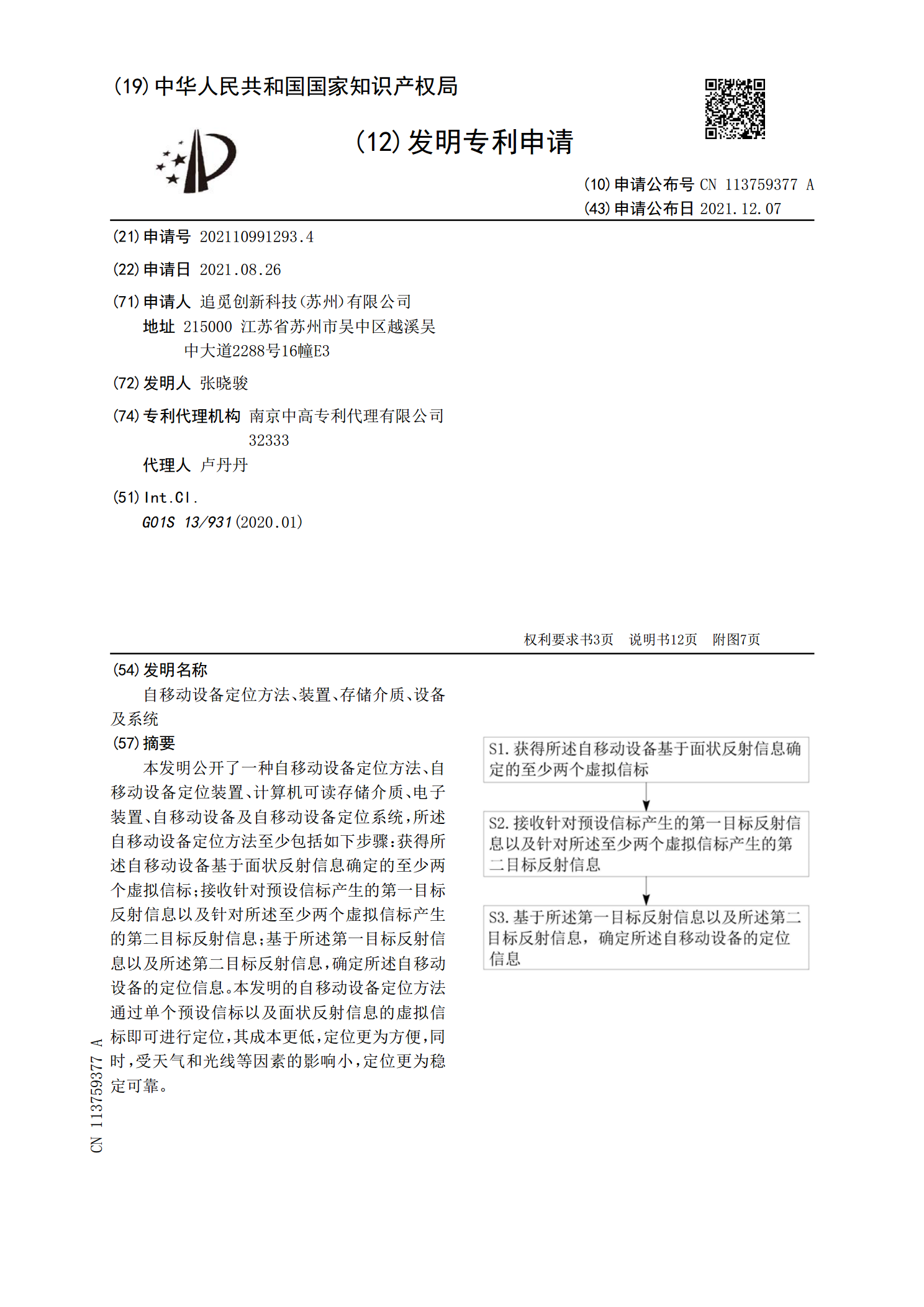
本发明公开了一种自移动设备定位方法、自移动设备定位装置、计算机可读存储介质、电子装置、自移动设备及自移动设备定位系统,所述自移动设备定位方法至少包括如下步骤:获得所述自移动设备基于面状反射信息确定的至少两个虚拟信标;接收针对预设信标产生的第一目标反射信息以及针对所述至少两个虚拟信标产生的第二目标反射信息;基于所述第一目标反射信息以及所述第二目标反射信息,确定所述自移动设备的定位信息。本发明的自移动设备定位方法通过单个预设信标以及面状反射信息的虚拟信标即可进行定位,其成本更低,定位更为方便,同时,受天气和光