
一种车辆跟踪方法和装置.pdf

秀美****甜v


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆跟踪方法和装置.pdf
本发明提供了一种车辆跟踪方法和装置,其中,所述方法包括:确定待跟踪的目标车辆,所述目标车辆为行驶在自身车辆正前方的车辆;确定车辆跟踪参考图像,所述参考图像中包含用于表征车辆身份的标识;调用摄像头按照预设参数拍摄目标车辆图像,所述目标车辆图像中包含用于表征所述目标车辆身份的标识;依据所述参考图像和所述目标车辆图像中包含的标识的大小关系,确定自身车辆与所述目标车辆之间的位置关系;依据所述位置关系对所述目标车辆进行跟踪。通过本发明提供的车辆跟踪方案,即便是车辆密集、拥堵的情况下也不影响目标车辆图像的获取,因此,

一种车辆跟踪方法及装置.pdf
本发明提供一种车辆跟踪方法及装置,所述方法包括:获取跟踪车辆的跟踪区域,将所述跟踪区域进行初始化计算,获取所述跟踪区域的主颜色作为基准颜色;获取所述跟踪区域的历史位置,根据所述历史位置计算所述跟踪区域的预测位置;以所述预测位置为中心,选择预设范围作为待跟踪区域;在待跟踪区域中获取与基准颜色相匹配的目标颜色对应的区域作为目标跟踪区域;以目标跟踪区域为新一轮车辆位置跟踪预测的初始跟踪区域进行车辆跟踪。因此可以在跟踪车辆移动速度较快时避免因陷入局部最优解的问题,从而可以提高跟踪成功率。

一种车辆检测跟踪方法及装置.pdf
本申请公开了一种车辆检测跟踪方法及装置。所述方法包括:对Yolo目标检测器进行训练;利用训练好的Yolo目标检测器检测视频每一帧中车辆的类型和位置;利用IOU跟踪器对Yolo目标检测器的输出和历史车辆中的IOU进行匹配并分配唯一的ID。所述装置包括:训练模块,其配置成对Yolo目标检测器进行训练;检测模块,其配置成利用训练好的Yolo目标检测器检测视频每一帧中车辆的类型和位置;和匹配模块,其配置成利用IOU跟踪器对Yolo目标检测器的输出和历史车辆中的IOU进行匹配并分配唯一的ID。

一种夜间车辆检测方法、跟踪方法及装置.pdf
本发明提供了一种夜间车辆检测方法及装置,以提高夜间车辆检测的准确性;相应地,本发明还提供了一种夜间车辆跟踪方法及装置,以提高夜间车辆追踪的准确性。其中一种夜间车辆检测方法包括:对车辆图像进行标定,得到标定比例;计算所述车辆图像的连通域;利用尾灯模型对所述连通域进行车灯提取,得到有效车灯;根据所述标定比例对所述有效车灯进行车灯配对,得到车灯对;将属于同一辆车的车灯对归为一组,并将所述车灯对中的尾灯对作为检测目标进行检测。本发明提供的车辆检测方法,对车灯提取进行了创新性的改进,降低了路面反射光线及道路两旁的路
路径跟踪控制方法、装置、系统和车辆.pdf
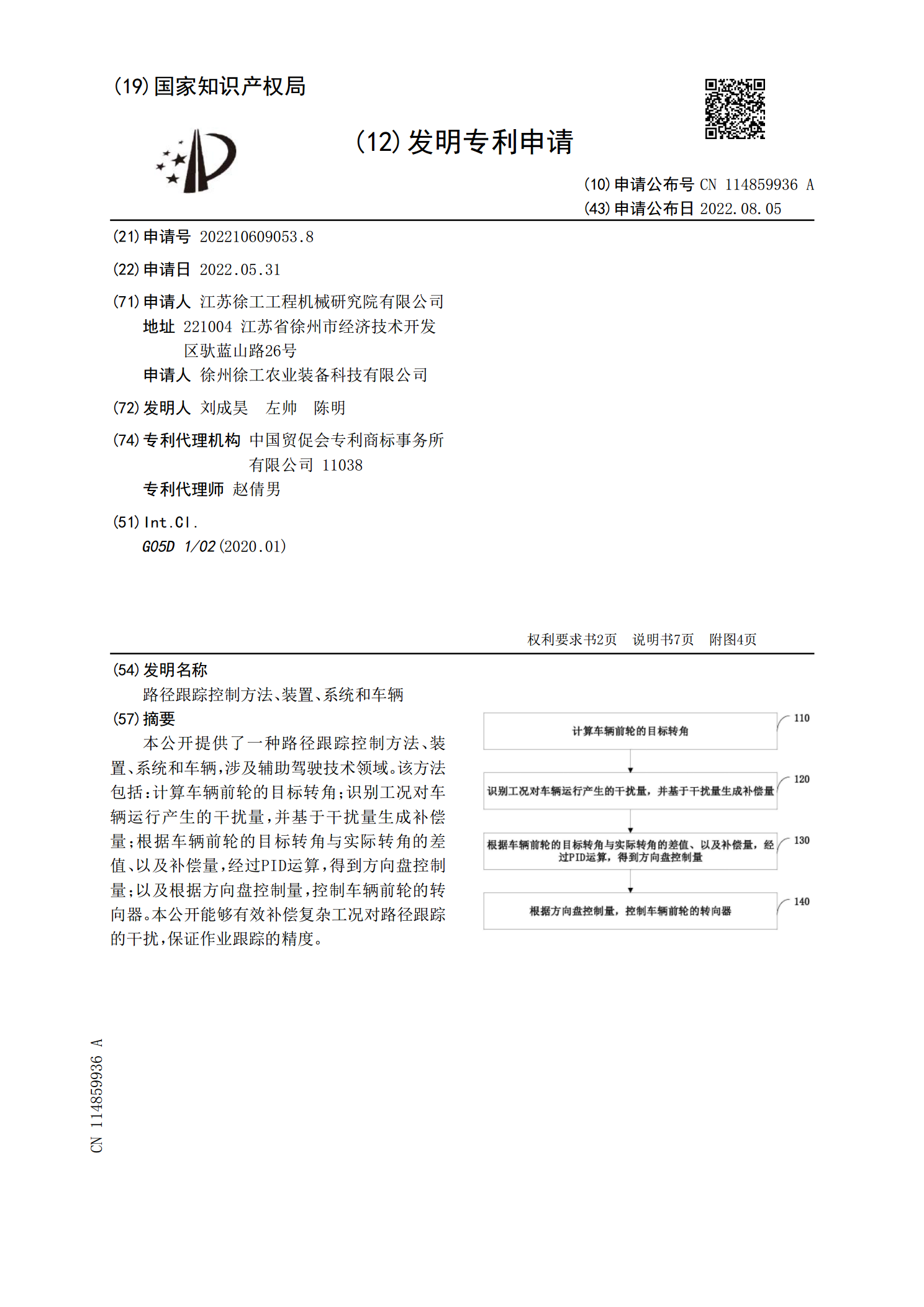
本公开提供了一种路径跟踪控制方法、装置、系统和车辆,涉及辅助驾驶技术领域。该方法包括:计算车辆前轮的目标转角;识别工况对车辆运行产生的干扰量,并基于干扰量生成补偿量;根据车辆前轮的目标转角与实际转角的差值、以及补偿量,经过PID运算,得到方向盘控制量;以及根据方向盘控制量,控制车辆前轮的转向器。本公开能够有效补偿复杂工况对路径跟踪的干扰,保证作业跟踪的精度。