
机器人跟随方法、机器人以及存储介质.pdf

睿达****的的


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人跟随方法、机器人以及存储介质.pdf
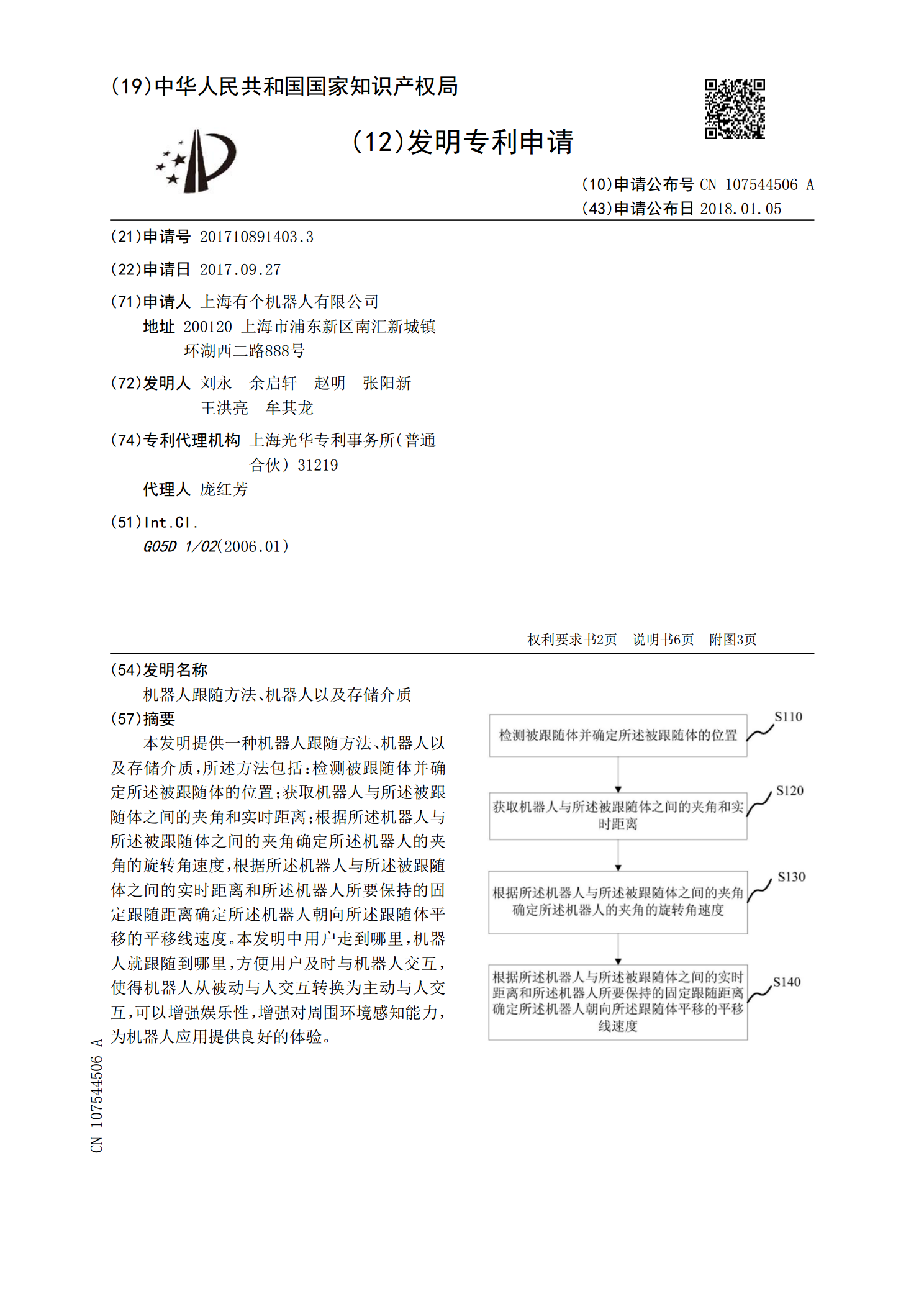
本发明提供一种机器人跟随方法、机器人以及存储介质,所述方法包括:检测被跟随体并确定所述被跟随体的位置;获取机器人与所述被跟随体之间的夹角和实时距离;根据所述机器人与所述被跟随体之间的夹角确定所述机器人的夹角的旋转角速度,根据所述机器人与所述被跟随体之间的实时距离和所述机器人所要保持的固定跟随距离确定所述机器人朝向所述跟随体平移的平移线速度。本发明中用户走到哪里,机器人就跟随到哪里,方便用户及时与机器人交互,使得机器人从被动与人交互转换为主动与人交互,可以增强娱乐性,增强对周围环境感知能力,为机器人应用提供

机器人跟随方法、装置、电子设备以及存储介质.pdf
本发明公开了一种机器人跟随方法、装置、电子设备以及存储介质。所述方法包括实时获取机器人跟随目标对象运动时的运动跟随信息;运动跟随信息用于描述目标对象在机器人坐标系下的位置、机器人与周边障碍物的相对运动关系、机器人周边是否存在障碍物以及机器人自身运动状态,将运动跟随信息输入到预设的速度控制模型中输出得到对机器人的速度控制信号;速度控制模型按预设奖励函数进行强化学习训练得到,能根据速度控制信号控制机器人继续跟随目标对象进行运动,且使机器人与目标对象保持在预设距离范围内及阻止机器人与周围障碍物发生碰撞,解决了跟

足浴机器人的控制方法、足浴机器人以及存储介质.pdf
本申请属于机器人技术领域,尤其涉及一种足浴机器人的控制方法、足浴机器人以及存储介质。该足浴机器人的控制方法包括:根据烘干指令控制所述足浴机器人移动至预设烘干处;控制所述预设烘干处对所述足浴机器人执行烘干操作;检测所述足浴机器人的内部环境得到检测结果,所述内部环境包括内部湿度或内部温度中至少一项;当所述检测结果达到预设数值时,控制所述预设烘干处停止所述烘干操作。如此,本发明提供的足浴机器人的控制方法,能够使足浴机器人根据烘干指令自动行进至设置有烘干设备的指定地点进行热风烘干,去除执行排水操作后内部结构滞留的

搬运机器人运行控制方法、装置、机器人以及存储介质.pdf
本发明公开了一种搬运机器人运行控制方法、装置、搬运机器人以及存储介质,涉及机器人技术领域,其中的方法包括:速度环单元基于速度控制指令驱动搬运机器人的主动轮运行;判断搬运机器人的当前位置与终点之间的距离是否小于或等于距离阈值;如果是,则位置环单元基于搬运机器人的理论位移与实际位移之间的偏差生成位移控制指令;将速度控制指令切换为位移控制指令,以使速度环单元基于位移控制指令驱动搬运机器人的主动轮运行。本发明的控制方法、装置、搬运机器人以及存储介质,能够在纠偏的同时提高机器人的定位精度和适应能力,可以在变负载和快
机器人及其控制方法以及可读存储介质.pdf
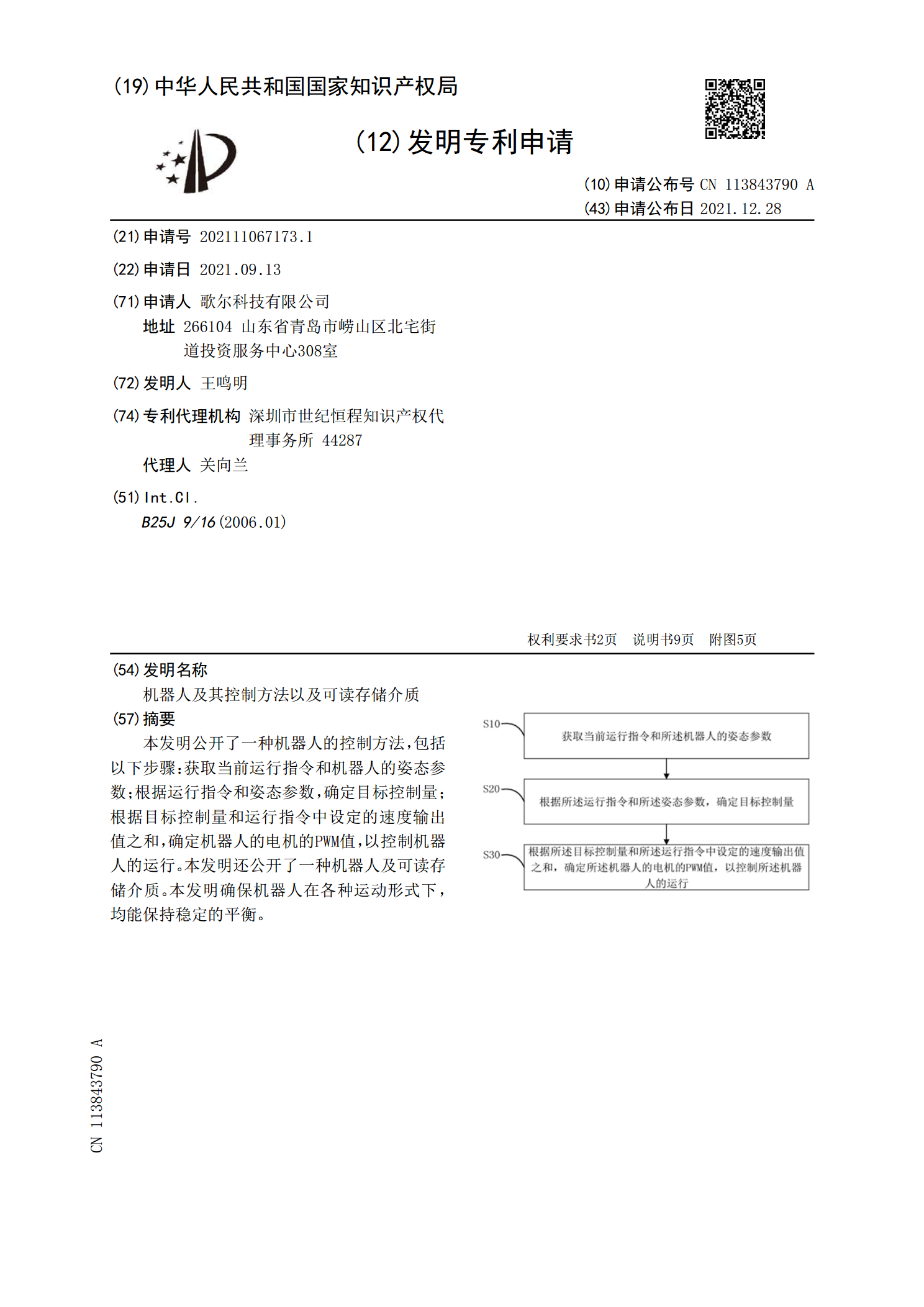
本发明公开了一种机器人的控制方法,包括以下步骤:获取当前运行指令和机器人的姿态参数;根据运行指令和姿态参数,确定目标控制量;根据目标控制量和运行指令中设定的速度输出值之和,确定机器人的电机的PWM值,以控制机器人的运行。本发明还公开了一种机器人及可读存储介质。本发明确保机器人在各种运动形式下,均能保持稳定的平衡。