
机器人及其控制方法以及可读存储介质.pdf

鸿朗****ka

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人及其控制方法以及可读存储介质.pdf
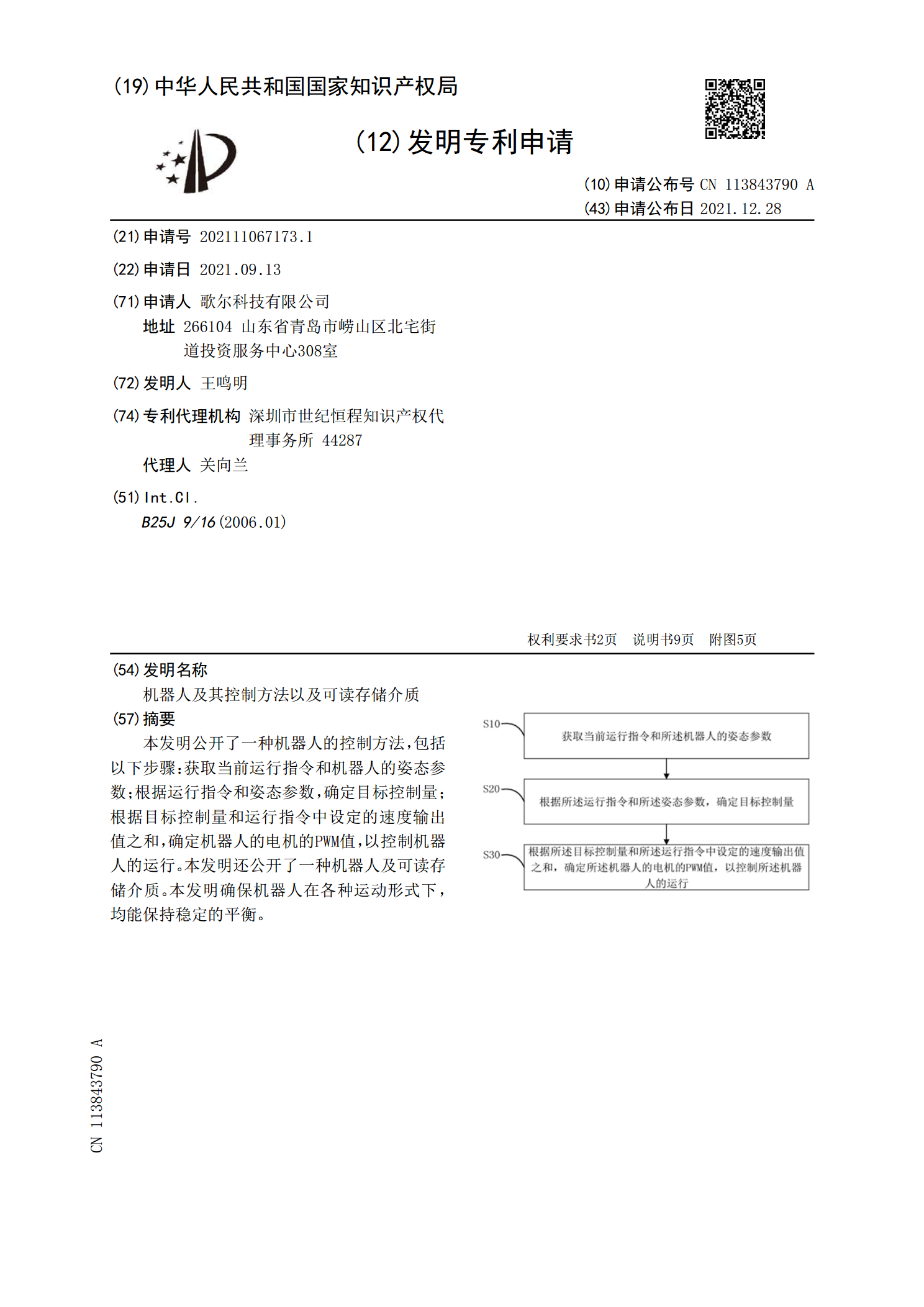
本发明公开了一种机器人的控制方法,包括以下步骤:获取当前运行指令和机器人的姿态参数;根据运行指令和姿态参数,确定目标控制量;根据目标控制量和运行指令中设定的速度输出值之和,确定机器人的电机的PWM值,以控制机器人的运行。本发明还公开了一种机器人及可读存储介质。本发明确保机器人在各种运动形式下,均能保持稳定的平衡。
机器人及其避障方法以及计算机可读存储介质.pdf
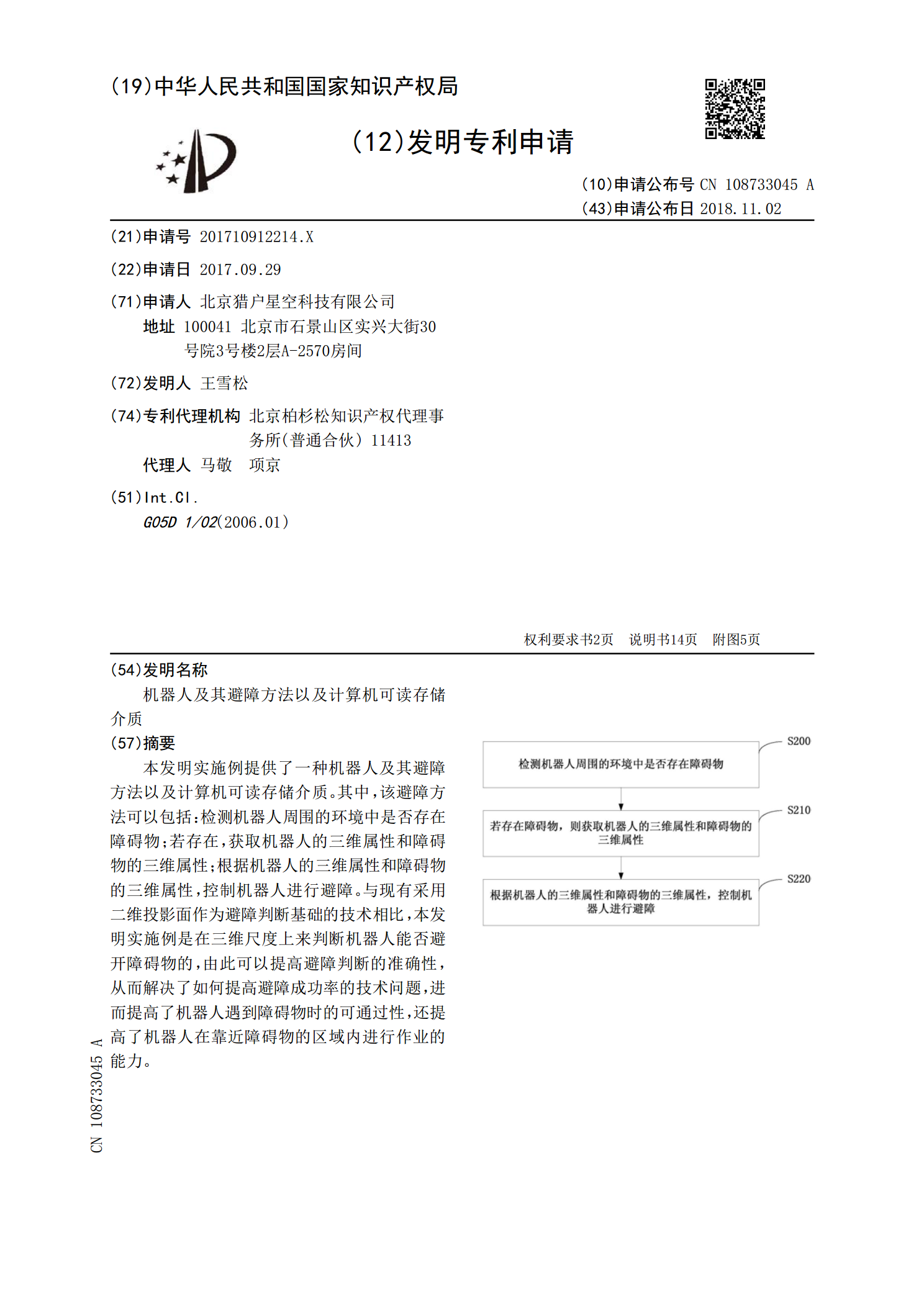
本发明实施例提供了一种机器人及其避障方法以及计算机可读存储介质。其中,该避障方法可以包括:检测机器人周围的环境中是否存在障碍物;若存在,获取机器人的三维属性和障碍物的三维属性;根据机器人的三维属性和障碍物的三维属性,控制机器人进行避障。与现有采用二维投影面作为避障判断基础的技术相比,本发明实施例是在三维尺度上来判断机器人能否避开障碍物的,由此可以提高避障判断的准确性,从而解决了如何提高避障成功率的技术问题,进而提高了机器人遇到障碍物时的可通过性,还提高了机器人在靠近障碍物的区域内进行作业的能力。
智能音箱、控制方法以及可读存储介质.pdf
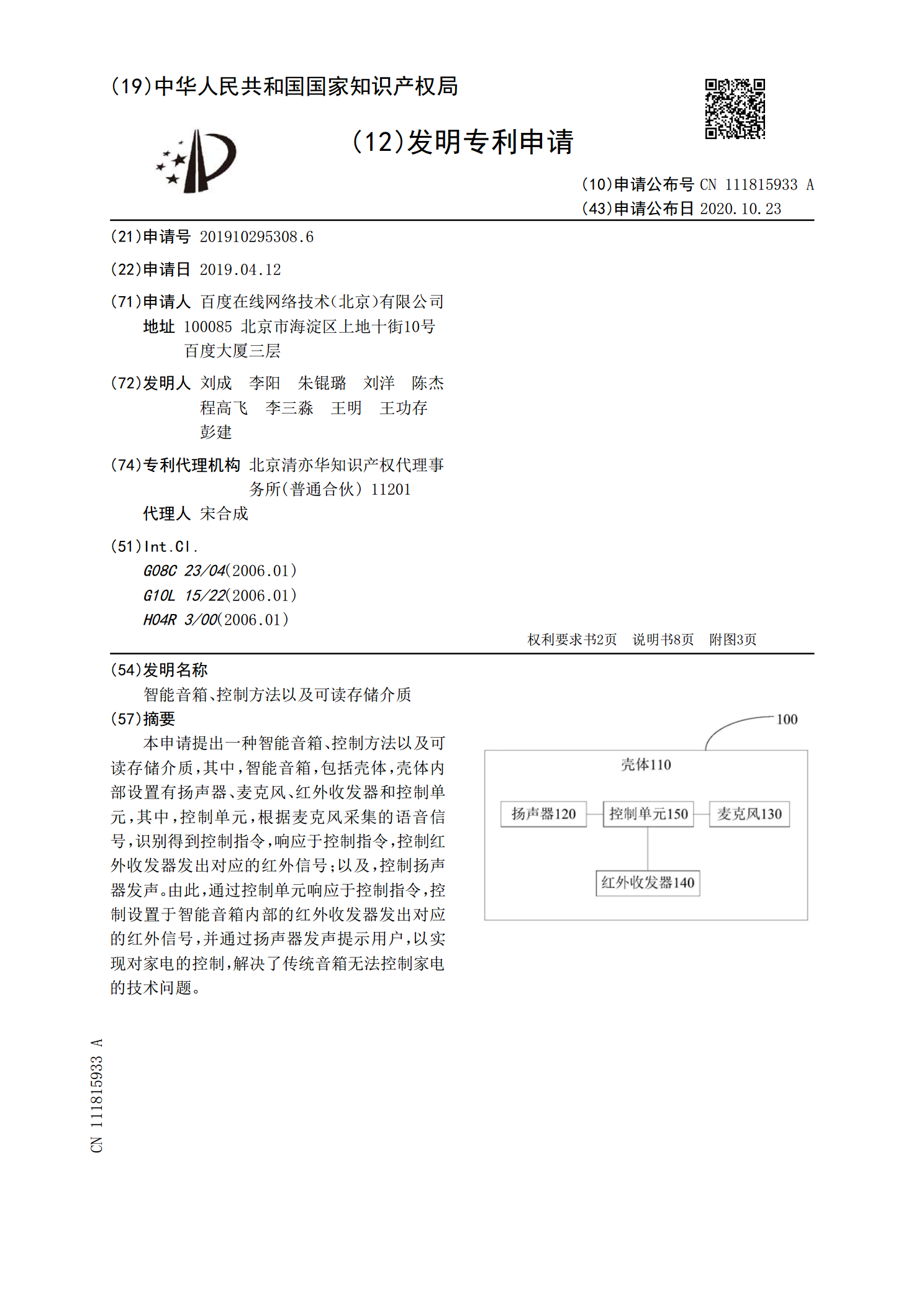
本申请提出一种智能音箱、控制方法以及可读存储介质,其中,智能音箱,包括壳体,壳体内部设置有扬声器、麦克风、红外收发器和控制单元,其中,控制单元,根据麦克风采集的语音信号,识别得到控制指令,响应于控制指令,控制红外收发器发出对应的红外信号;以及,控制扬声器发声。由此,通过控制单元响应于控制指令,控制设置于智能音箱内部的红外收发器发出对应的红外信号,并通过扬声器发声提示用户,以实现对家电的控制,解决了传统音箱无法控制家电的技术问题。

咖啡机及其控制方法和控制装置、以及可读存储介质.pdf
本发明公开一种咖啡机及其控制方法和控制装置、以及可读存储介质,其中,所述咖啡机的控制方法包括;控制流体驱动装置将锅炉的热水通过连接管路组件输送至酿造室;当锅炉的热水量抽取下降至第一设定水位值时,控制流体驱动装置按照第一设定参数值,将所述锅炉内余下的热水抽取至酿造室;控制所述流体驱动装置将外界空气通过连接管路组件驱动至所述酿造室,以对所述连接管路组件和所述酿造室进行吹干;所述咖啡机的控制方法可以准确地掌握流体驱动装置将锅炉内的热水完全抽完的时间,而不必需要等待较长时间,以确保锅炉内的热水抽取完,而后能够快速

开门方法、机器人以及计算机可读存储介质.pdf
本申请公开了一种开门方法、机器人以及计算机可读存储介质,该开门方法包括:对目标场景的彩色图像进行识别,得到门的图像以及把手的图像;根据目标场景的深度图像,确定门的图像对应的第一点云以及把手的图像对应的第二点云;获取门的状态;在门的状态为关闭状态时,根据第一点云和第二点云中的至少一个,确定门与地面平行的法向量;至少根据法向量以及第二点云,确定执行器的位姿;驱动执行器按照位姿抓取把手;在执行器抓取把手的同时,驱动执行器按照第一圆弧轨迹运动以旋拧把手,以及驱动执行器按照第二圆弧轨迹运动以打开门。本申请所提供的方