
清洁机器人控制方法和清洁机器人.pdf

子璇****君淑


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁机器人控制方法和清洁机器人.pdf
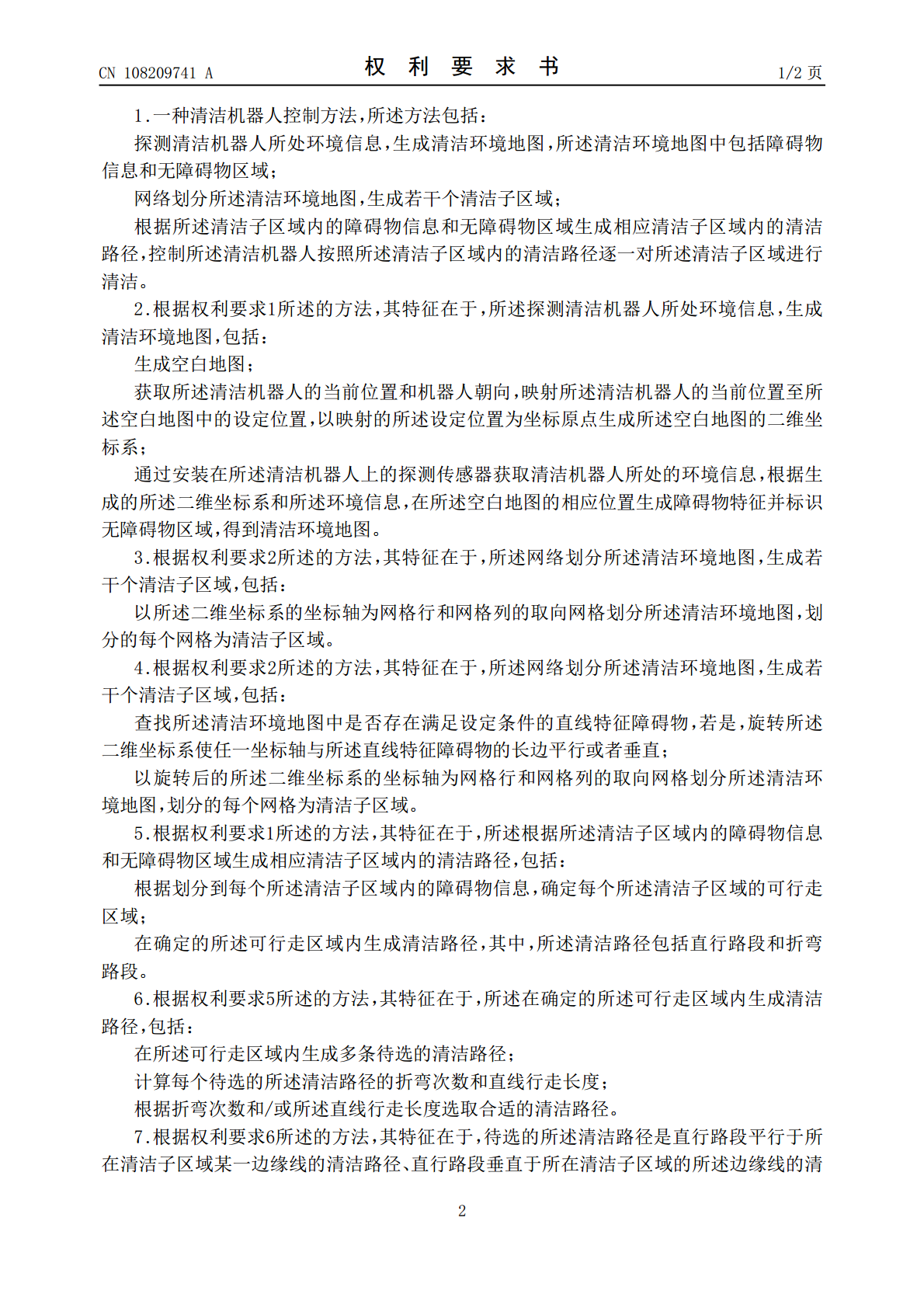
本发明涉及一种清洁机器人控制方法,包括:探测清洁机器人所处环境信息,生成清洁环境地图,所述清洁环境地图中包括障碍物信息和无障碍物区域;网络划分所述清洁环境地图,生成若干个清洁子区域;根据所述清洁子区域内的障碍物信息和无障碍物区域生成相应清洁子区域内的清洁路径,控制所述清洁机器人按照所述清洁子区域内的清洁路径逐一对所述清洁子区域进行清洁。上述方法能够使清洁机器人的清洁覆盖度更大、清洁效率更高。
机器人清洁器和包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法.pdf
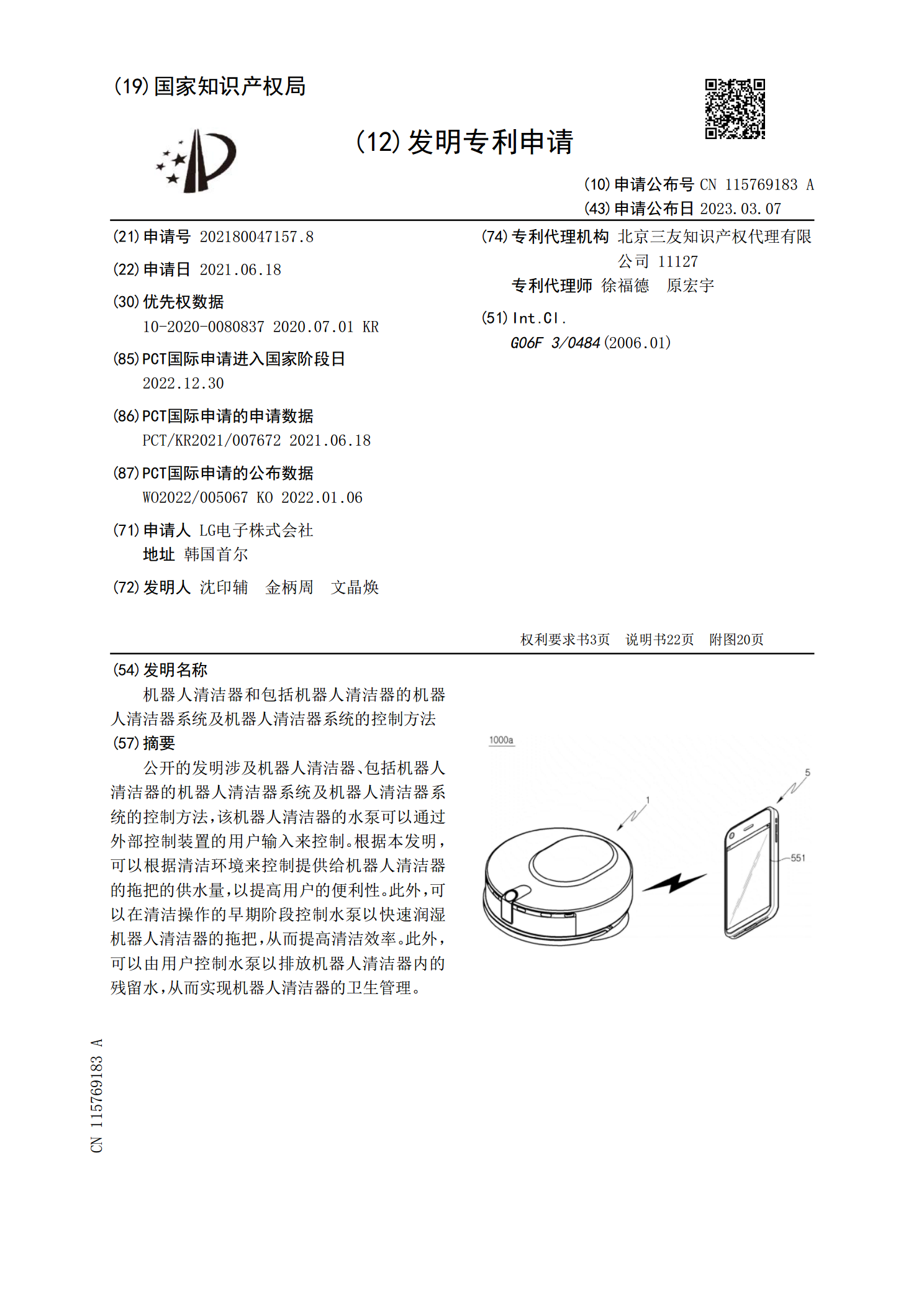
公开的发明涉及机器人清洁器、包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法,该机器人清洁器的水泵可以通过外部控制装置的用户输入来控制。根据本发明,可以根据清洁环境来控制提供给机器人清洁器的拖把的供水量,以提高用户的便利性。此外,可以在清洁操作的早期阶段控制水泵以快速润湿机器人清洁器的拖把,从而提高清洁效率。此外,可以由用户控制水泵以排放机器人清洁器内的残留水,从而实现机器人清洁器的卫生管理。

机器人清洁器及机器人清洁器控制方法.pdf
公开了机器人清洁器及用于控制机器人清洁器的方法。机器人清洁器包括主体、一个或多个红外线(IR)传感器、驱动电机;以及控制器,其中:一个或多个IR传感器配置成在各个方向接收来自传输设备的IR信号;驱动电机配置成在从控制器接收到控制信号时将主体朝传输设备移动;控制器配置成通过生成传输设备方向估算值去除多个IR信号之中的反射波,以及根据传输设备方向估算值利用驱动电机控制主体的驱动。
清洁机器人的贴边作业方法和清洁机器人.pdf
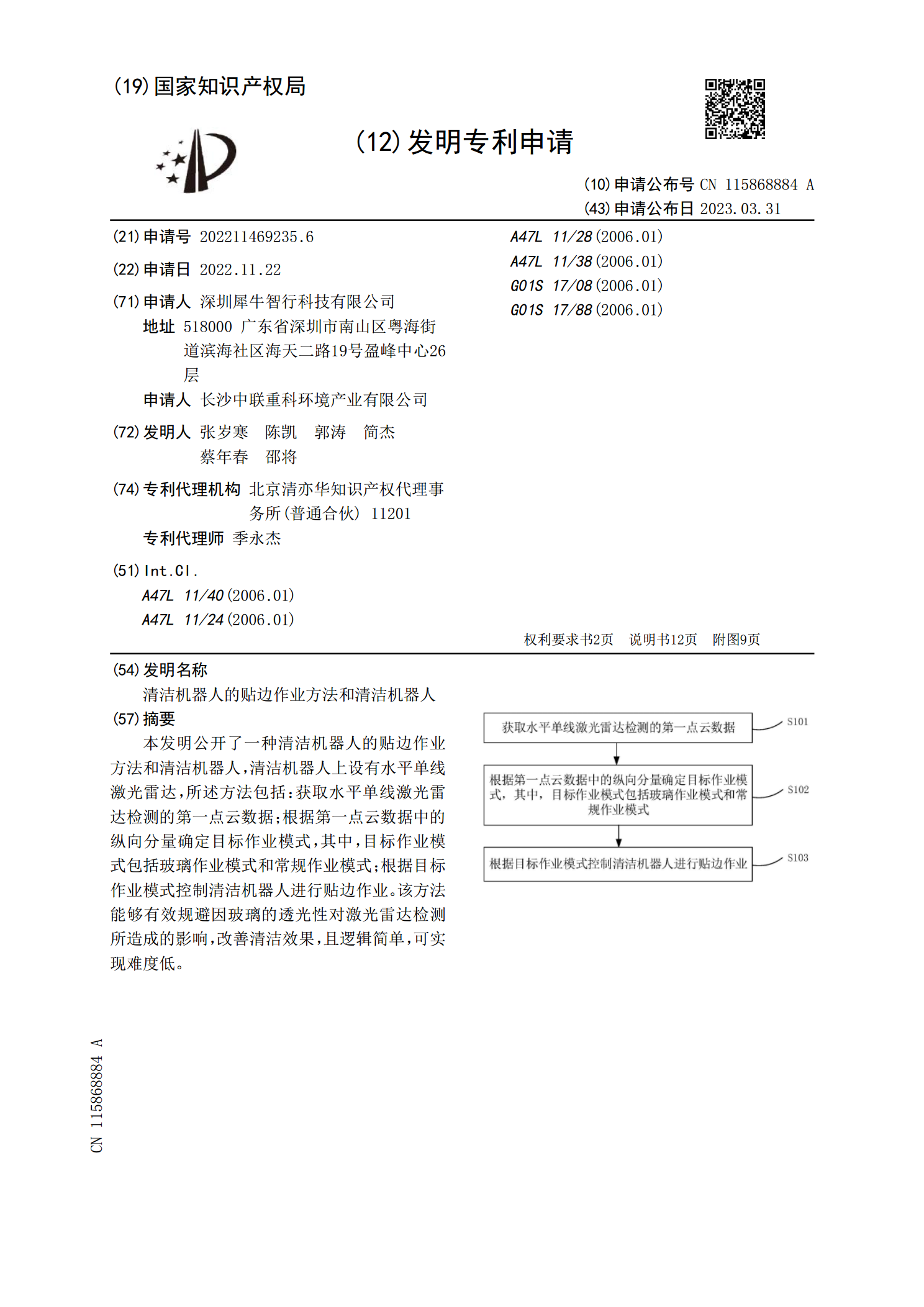
本发明公开了一种清洁机器人的贴边作业方法和清洁机器人,清洁机器人上设有水平单线激光雷达,所述方法包括:获取水平单线激光雷达检测的第一点云数据;根据第一点云数据中的纵向分量确定目标作业模式,其中,目标作业模式包括玻璃作业模式和常规作业模式;根据目标作业模式控制清洁机器人进行贴边作业。该方法能够有效规避因玻璃的透光性对激光雷达检测所造成的影响,改善清洁效果,且逻辑简单,可实现难度低。

侧刷组件、机器人清洁器和机器人清洁器的控制方法.pdf
本发明提供了一种侧刷组件、机器人清洁器和机器人清洁器的控制方法,该侧刷组件包括能够暴露于主体的外侧以及返回到主体内侧的侧臂以及安装到侧臂的侧刷单元。该机器人清洁器包括主体和至少一个侧刷组件,以增加灰尘去除面积。侧刷组件包括侧刷本体、安装到侧刷本体的底表面并构造成暴露于主体外侧的侧臂、可旋转地安装到侧臂的侧刷单元、被构造成与侧臂一起旋转的杆、被构造成通过从侧臂驱动马达接收驱动力而旋转的凸轮、以及连接该杆和凸轮以通过其弹性力旋转杆的弹性元件。