
清洁机器人的贴边作业方法和清洁机器人.pdf

志玉****爱啊


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁机器人的贴边作业方法和清洁机器人.pdf
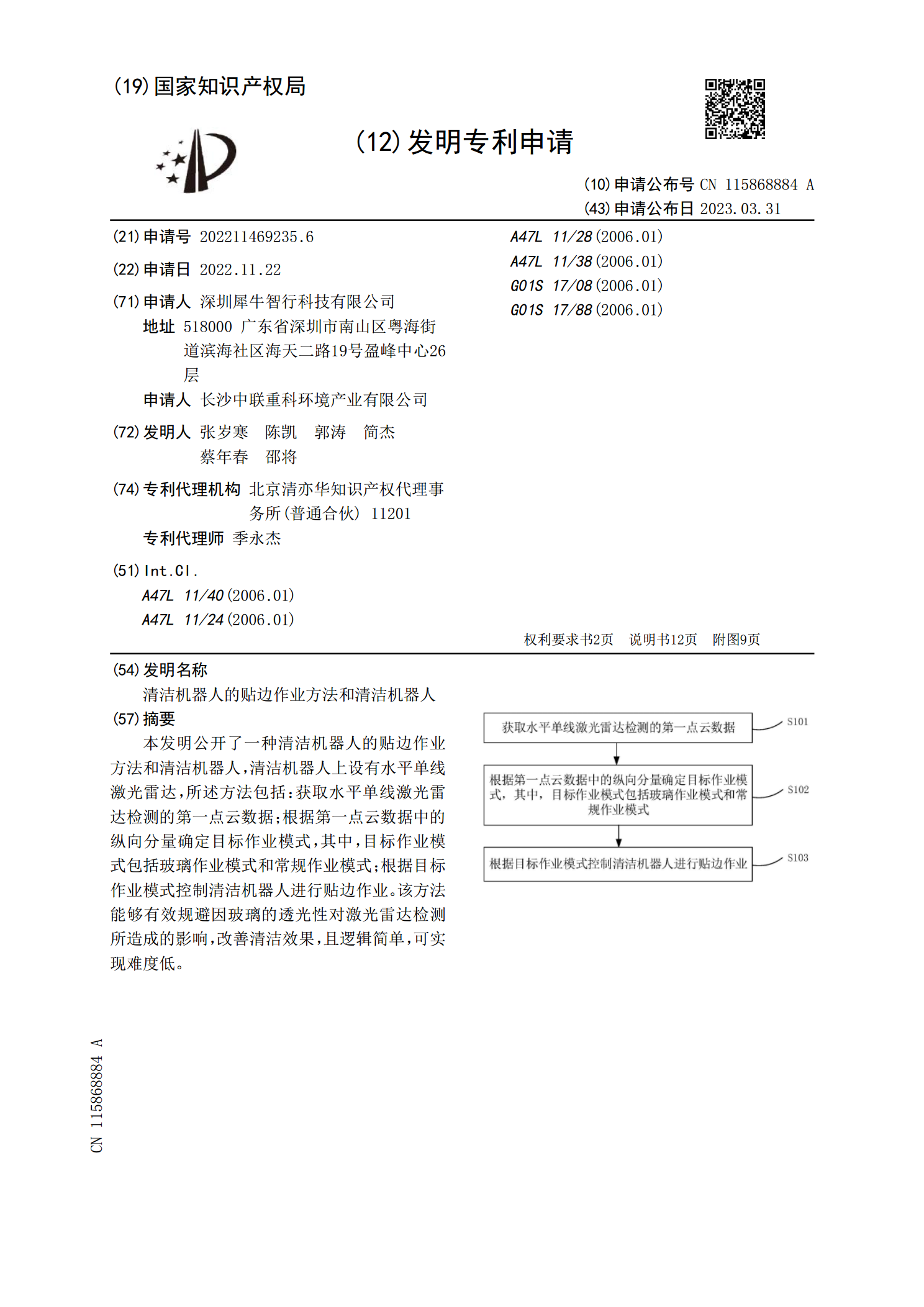
本发明公开了一种清洁机器人的贴边作业方法和清洁机器人,清洁机器人上设有水平单线激光雷达,所述方法包括:获取水平单线激光雷达检测的第一点云数据;根据第一点云数据中的纵向分量确定目标作业模式,其中,目标作业模式包括玻璃作业模式和常规作业模式;根据目标作业模式控制清洁机器人进行贴边作业。该方法能够有效规避因玻璃的透光性对激光雷达检测所造成的影响,改善清洁效果,且逻辑简单,可实现难度低。
机器人清洁器和包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法.pdf
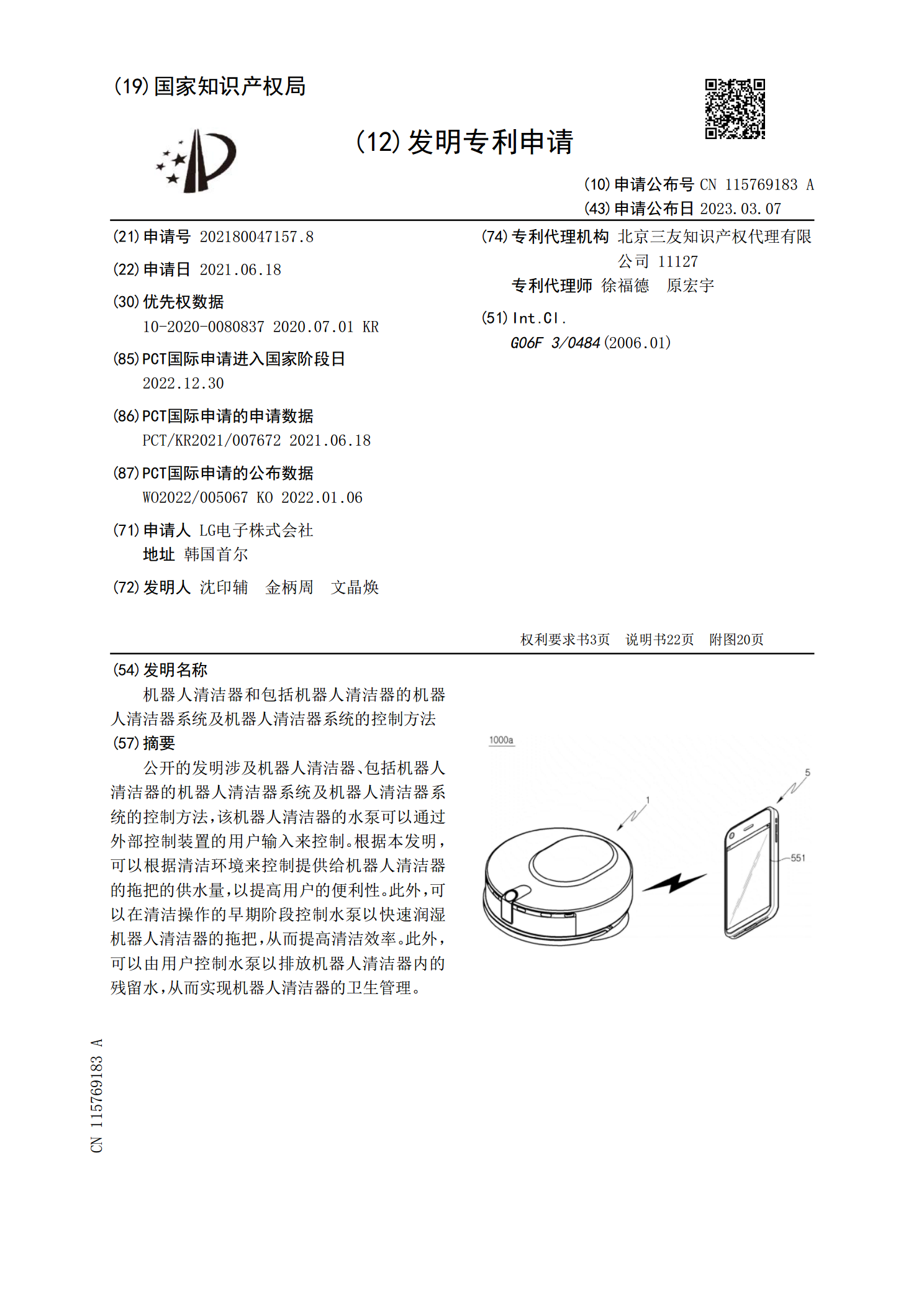
公开的发明涉及机器人清洁器、包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法,该机器人清洁器的水泵可以通过外部控制装置的用户输入来控制。根据本发明,可以根据清洁环境来控制提供给机器人清洁器的拖把的供水量,以提高用户的便利性。此外,可以在清洁操作的早期阶段控制水泵以快速润湿机器人清洁器的拖把,从而提高清洁效率。此外,可以由用户控制水泵以排放机器人清洁器内的残留水,从而实现机器人清洁器的卫生管理。
清洁机器人控制方法和清洁机器人.pdf
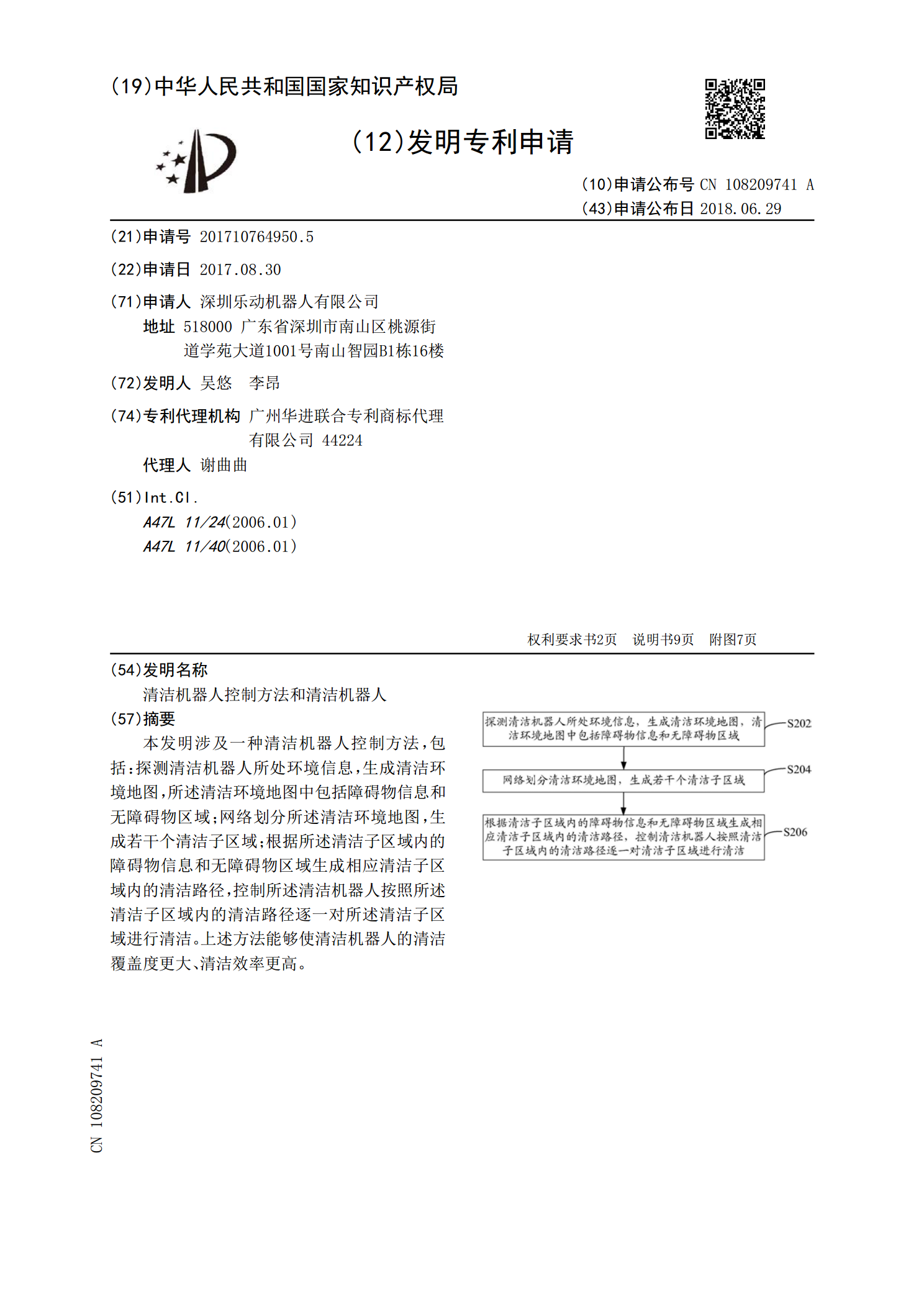
本发明涉及一种清洁机器人控制方法,包括:探测清洁机器人所处环境信息,生成清洁环境地图,所述清洁环境地图中包括障碍物信息和无障碍物区域;网络划分所述清洁环境地图,生成若干个清洁子区域;根据所述清洁子区域内的障碍物信息和无障碍物区域生成相应清洁子区域内的清洁路径,控制所述清洁机器人按照所述清洁子区域内的清洁路径逐一对所述清洁子区域进行清洁。上述方法能够使清洁机器人的清洁覆盖度更大、清洁效率更高。

清洁机器人信息加载方法和清洁机器人.pdf
本申请涉及一种清洁机器人信息加载方法和清洁机器人。清洁机器人信息加载方法包括:检测是否满足预设的重新加载触发条件;若是,则获取待使用的地图信息并执行地图信息加载操作,得到新加载的用于执行任务的地图信息;根据新加载的用于执行任务的地图信息获取清洁机器人的位姿。采用本方法,清洁机器人可以具备重新加载地图的能力,使得清洁机器人在工作过程中,可以灵活进行地图信息的重载,而不限于固定的地图信息对应的一张地图,避免没有地图信息可适用而无法完成任务,可提高程序的鲁棒性,从而提高清洁机器人执行任务的可靠性。

清洁滚刷和清洁机器人.pdf
本发明涉及清洁设备领域,特别是涉及一种清洁滚刷,以及一种清洁机器人,该清洁滚刷通过设置具有中心轴线的滚刷本体,在滚刷本体上以中心轴线为中心周向设置有若干个刷体,其中,刷体具有至少两个以所述中心轴线为中心基准的径向远端和至少一个以所述中心轴线为中心基准的径向近端,每个径向近端均平滑过渡至相邻的径向远端,使得毛发等异物缠绕在刷体上时能够顺着所述径向远端往所述径向近端聚集,具体的,滚刷本体的两端分别设置有一个径向远端,滚刷本体的两端之间设置有至少一个径向近端,这种结构杜绝了毛发等缠绕异物从清洁刷的中间位置转移至