
道路点云数据处理系统.pdf

书生****22


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
道路点云数据处理系统.pdf
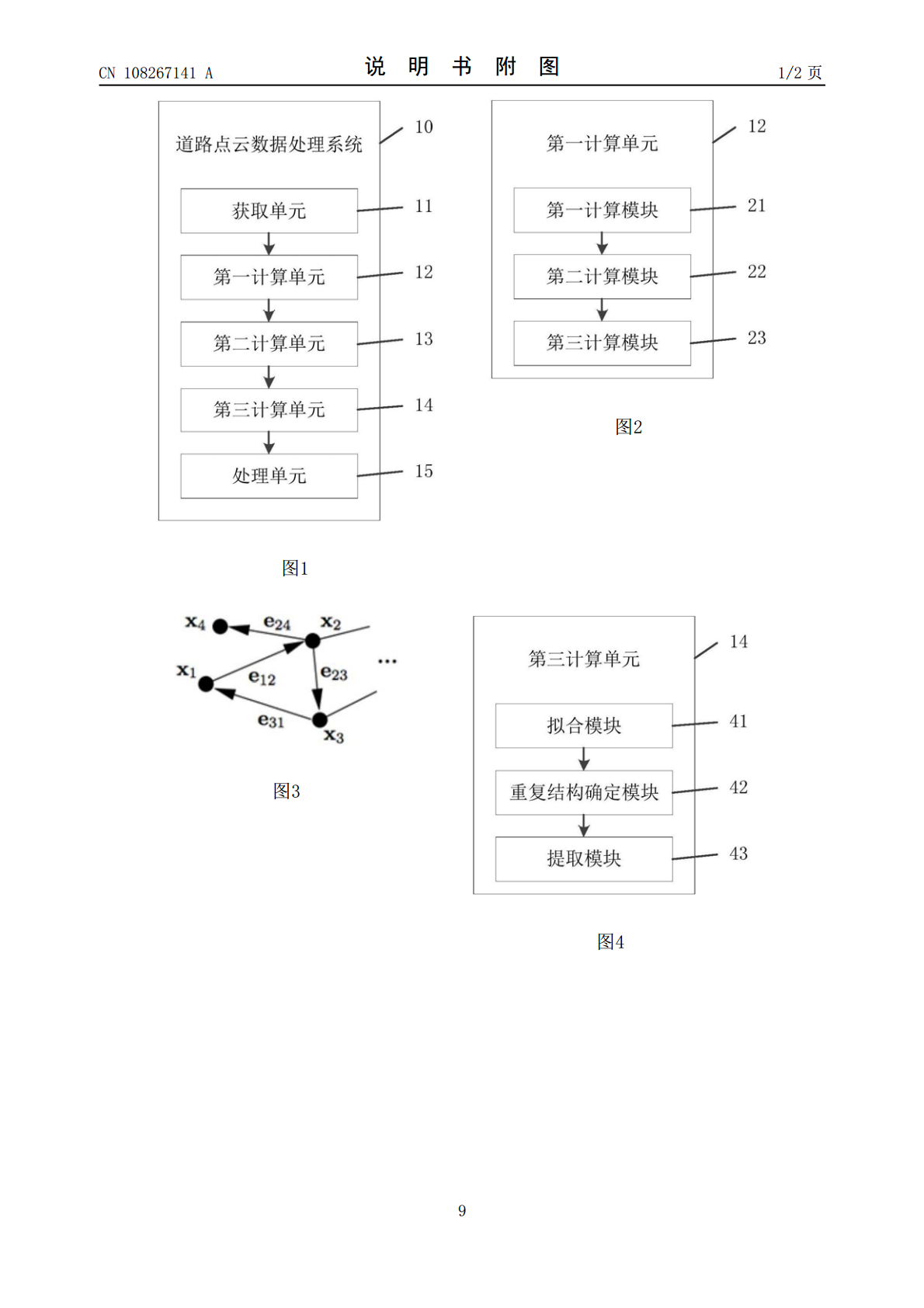
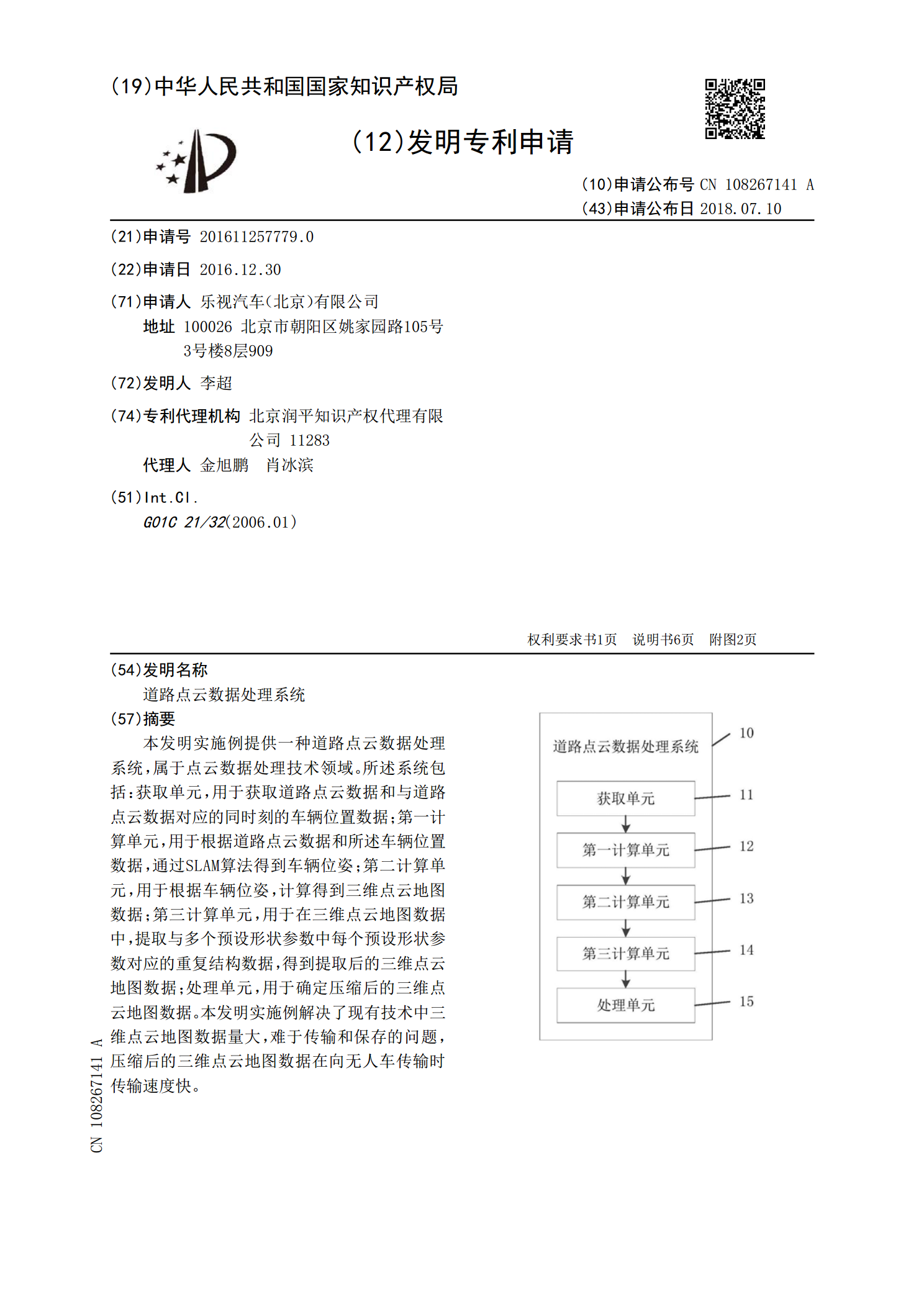
本发明实施例提供一种道路点云数据处理系统,属于点云数据处理技术领域。所述系统包括:获取单元,用于获取道路点云数据和与道路点云数据对应的同时刻的车辆位置数据;第一计算单元,用于根据道路点云数据和所述车辆位置数据,通过SLAM算法得到车辆位姿;第二计算单元,用于根据车辆位姿,计算得到三维点云地图数据;第三计算单元,用于在三维点云地图数据中,提取与多个预设形状参数中每个预设形状参数对应的重复结构数据,得到提取后的三维点云地图数据;处理单元,用于确定压缩后的三维点云地图数据。本发明实施例解决了现有技术中三维点云地
无人机激光雷达点云数据处理系统.pdf
本发明公开了无人机激光雷达点云数据处理系统,安装在无人机底部处的激光雷达,其用于对无人机下方周围环境进行检测,获取目标参数;设置在无人机底部处的摄像头;分析模块,分别与激光雷达和摄像电性连接,并生成不同时间段的点云数据组;重组模块,与分析模块电性连接,进而获得不同区域内的不同的点云数据;用于将不同区域内的点云数据配准至同一坐标系,进而获得不同区域内的三维数据。该无人机激光雷达点云数据处理系统,设计合理,能提高极大提升点云数据的处理速度与精度,为点云数据的处理与应用提供了保障,适合推广使用。

道路点云数据处理方法及系统.pdf
本发明实施例提供一种道路点云数据处理方法及系统,属于点云数据处理技术领域。所述方法包括:获取道路点云数据和与道路点云数据对应的同时刻的车辆位置数据;根据道路点云数据和车辆位置数据,通过SLAM算法得到车辆位姿;根据车辆位姿,计算得到三维点云地图数据;在三维点云地图数据中,提取与多个预设形状参数中每个预设形状参数对应的重复结构数据,得到提取后的三维点云地图数据;确定压缩后的三维点云地图数据。本发明实施例解决了现有技术中三维点云地图数据量大,难于传输和保存的问题,压缩后的三维点云地图数据在向无人车传输时,传输
pointnet点云道路目标分类-概念解析以及定义.pdf
pointnet点云道路目标分类-概述说明以及解释1.引言概述部分的内容主要是对整篇文章进行简要介绍,包括涉及的主题、研究对象以及目的等。下面是文章1.1概述部分的内容:概述随着自动驾驶和智能交通系统的不断发展,点云数据作为一种常见的感知数据类型,在道路目标分类中起着重要的作用。点云数据具有丰富的信息量和三维几何结构,但由于其无序性和不规则性,点云目标分类面临着诸多挑战。本文将介绍针对点云道路目标分类的一种有效方法——PointNet模型。PointNet模型是一种基于深度学习的点云处理模型,具有对点云数
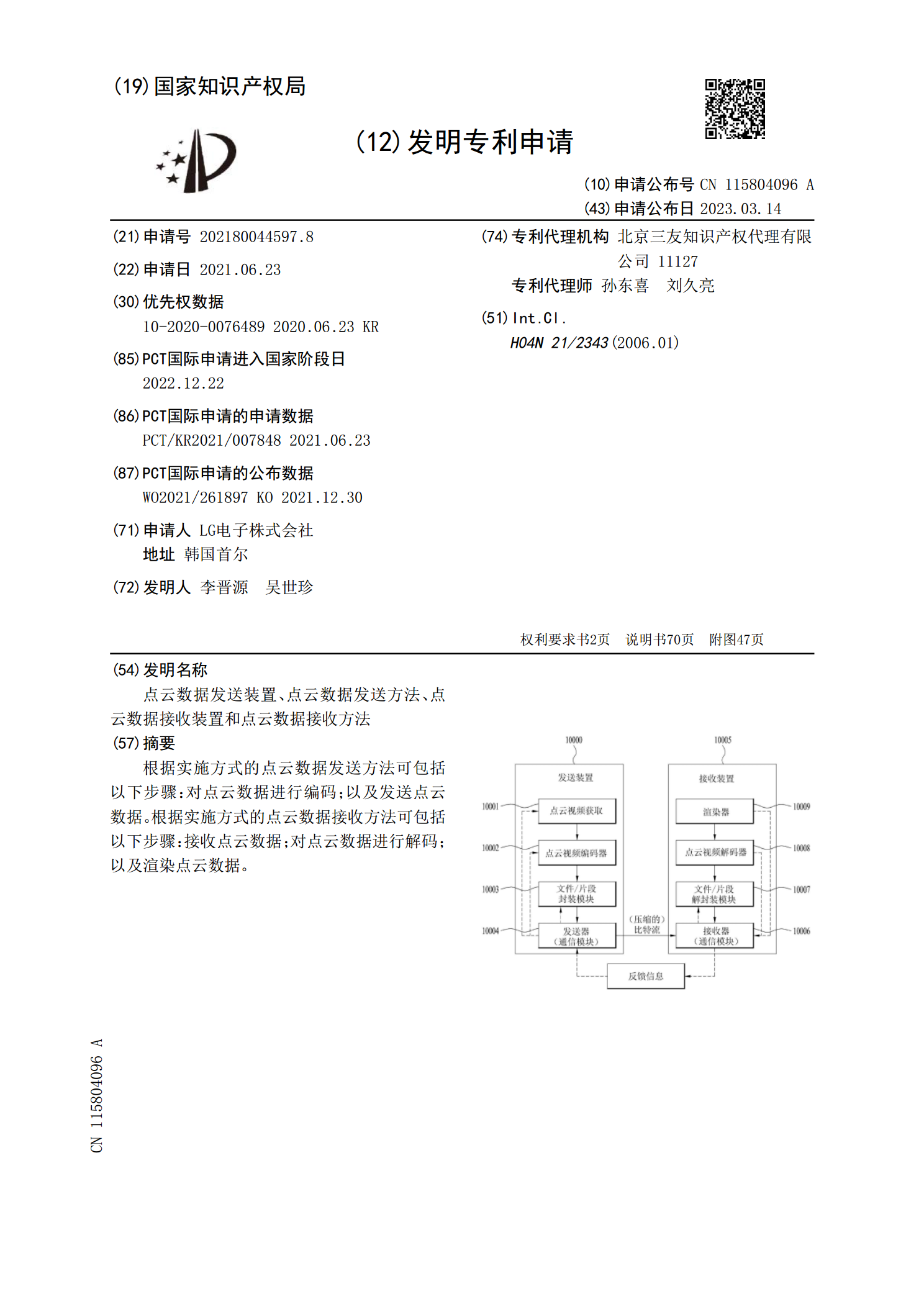
点云数据发送装置、点云数据发送方法、点云数据接收装置和点云数据接收方法.pdf
根据实施方式的点云数据发送方法可包括以下步骤:对点云数据进行编码;以及发送点云数据。根据实施方式的点云数据接收方法可包括以下步骤:接收点云数据;对点云数据进行解码;以及渲染点云数据。