
无人机激光雷达点云数据处理系统.pdf

玉环****找我

1/7
2/7

3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
无人机激光雷达点云数据处理系统.pdf
本发明公开了无人机激光雷达点云数据处理系统,安装在无人机底部处的激光雷达,其用于对无人机下方周围环境进行检测,获取目标参数;设置在无人机底部处的摄像头;分析模块,分别与激光雷达和摄像电性连接,并生成不同时间段的点云数据组;重组模块,与分析模块电性连接,进而获得不同区域内的不同的点云数据;用于将不同区域内的点云数据配准至同一坐标系,进而获得不同区域内的三维数据。该无人机激光雷达点云数据处理系统,设计合理,能提高极大提升点云数据的处理速度与精度,为点云数据的处理与应用提供了保障,适合推广使用。
道路点云数据处理系统.pdf
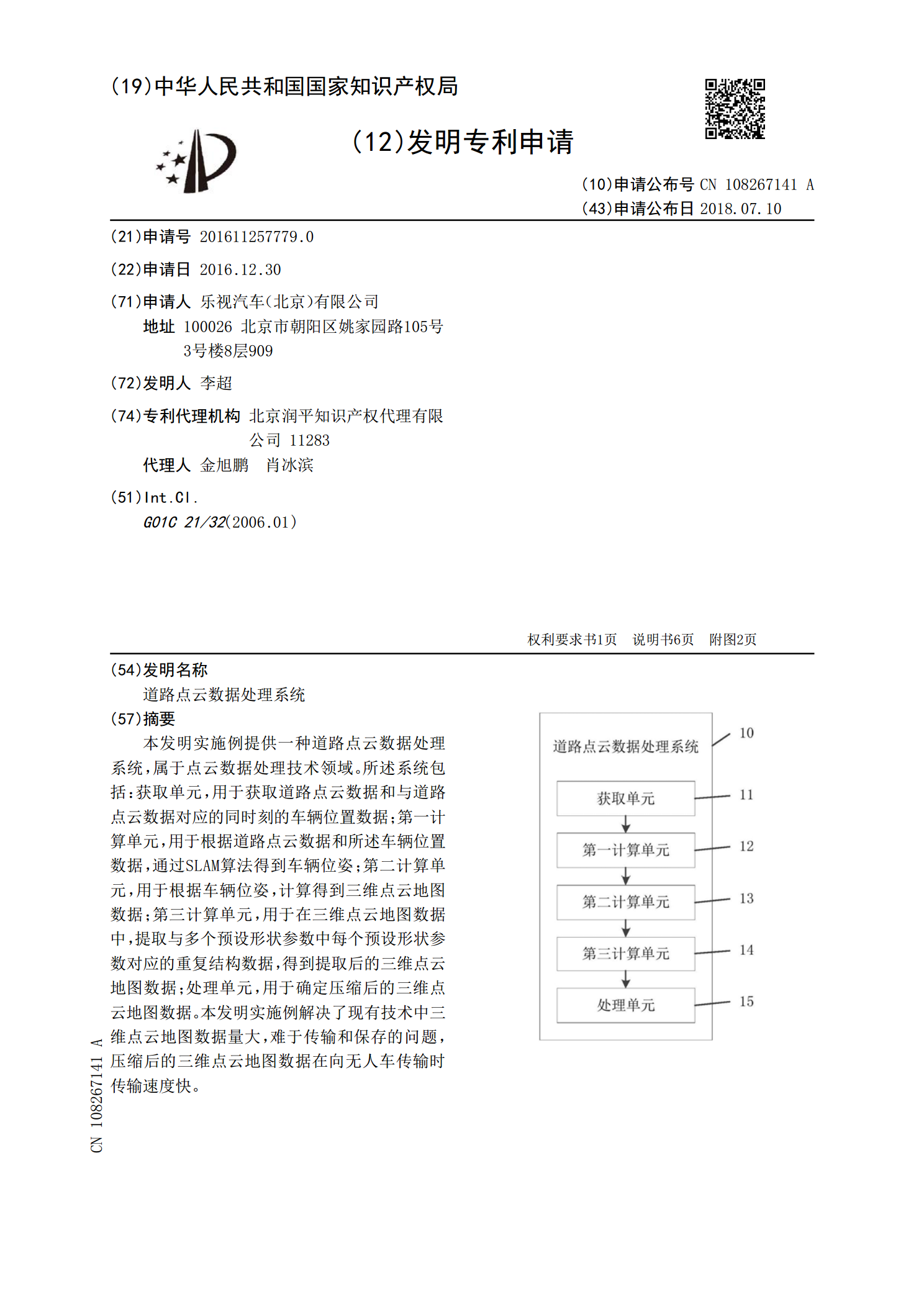
本发明实施例提供一种道路点云数据处理系统,属于点云数据处理技术领域。所述系统包括:获取单元,用于获取道路点云数据和与道路点云数据对应的同时刻的车辆位置数据;第一计算单元,用于根据道路点云数据和所述车辆位置数据,通过SLAM算法得到车辆位姿;第二计算单元,用于根据车辆位姿,计算得到三维点云地图数据;第三计算单元,用于在三维点云地图数据中,提取与多个预设形状参数中每个预设形状参数对应的重复结构数据,得到提取后的三维点云地图数据;处理单元,用于确定压缩后的三维点云地图数据。本发明实施例解决了现有技术中三维点云地
激光雷达及生成激光点云数据的方法.pdf
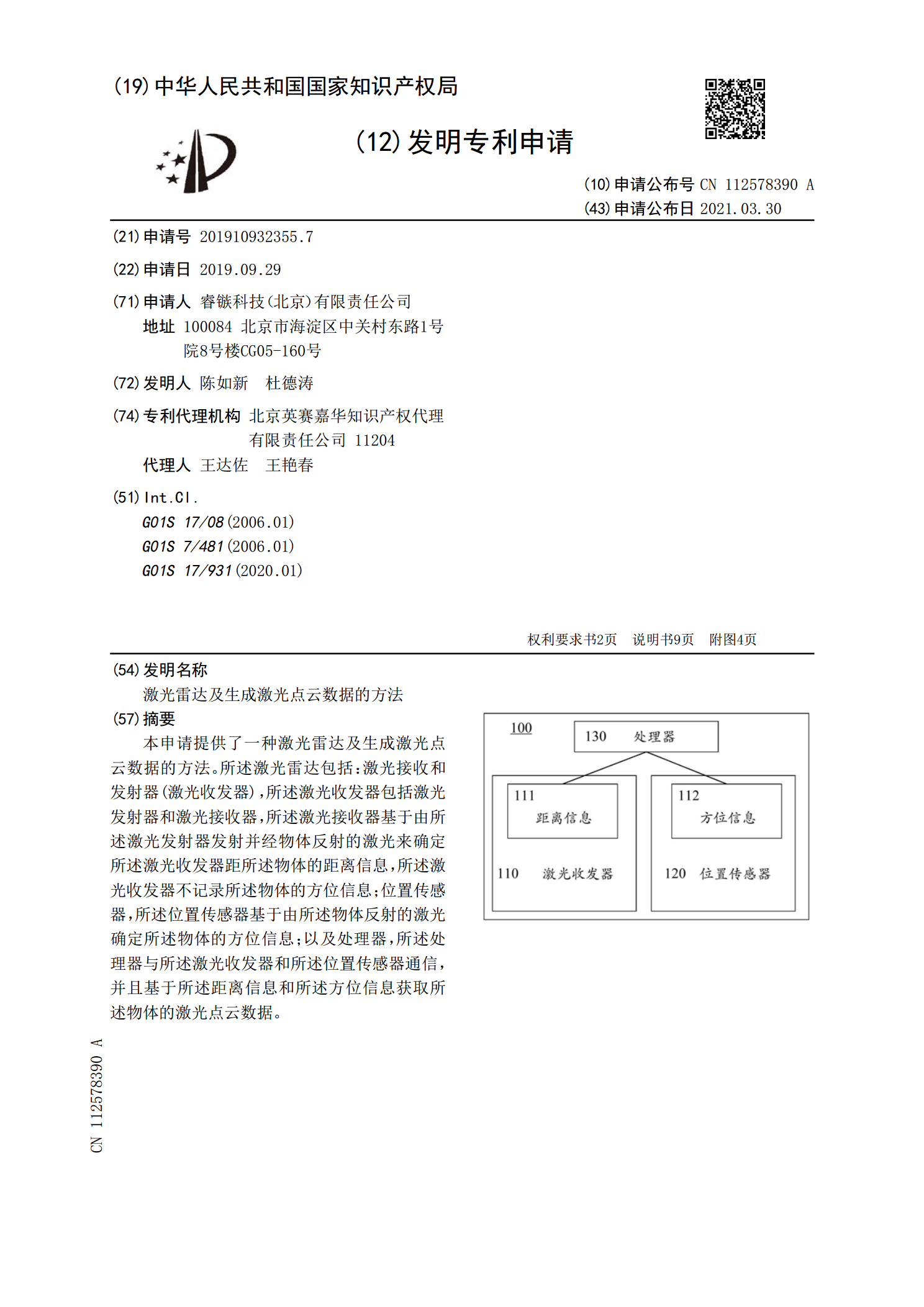
本申请提供了一种激光雷达及生成激光点云数据的方法。所述激光雷达包括:激光接收和发射器(激光收发器),所述激光收发器包括激光发射器和激光接收器,所述激光接收器基于由所述激光发射器发射并经物体反射的激光来确定所述激光收发器距所述物体的距离信息,所述激光收发器不记录所述物体的方位信息;位置传感器,所述位置传感器基于由所述物体反射的激光确定所述物体的方位信息;以及处理器,所述处理器与所述激光收发器和所述位置传感器通信,并且基于所述距离信息和所述方位信息获取所述物体的激光点云数据。
激光雷达点云质量评估方法、系统及装置.pdf
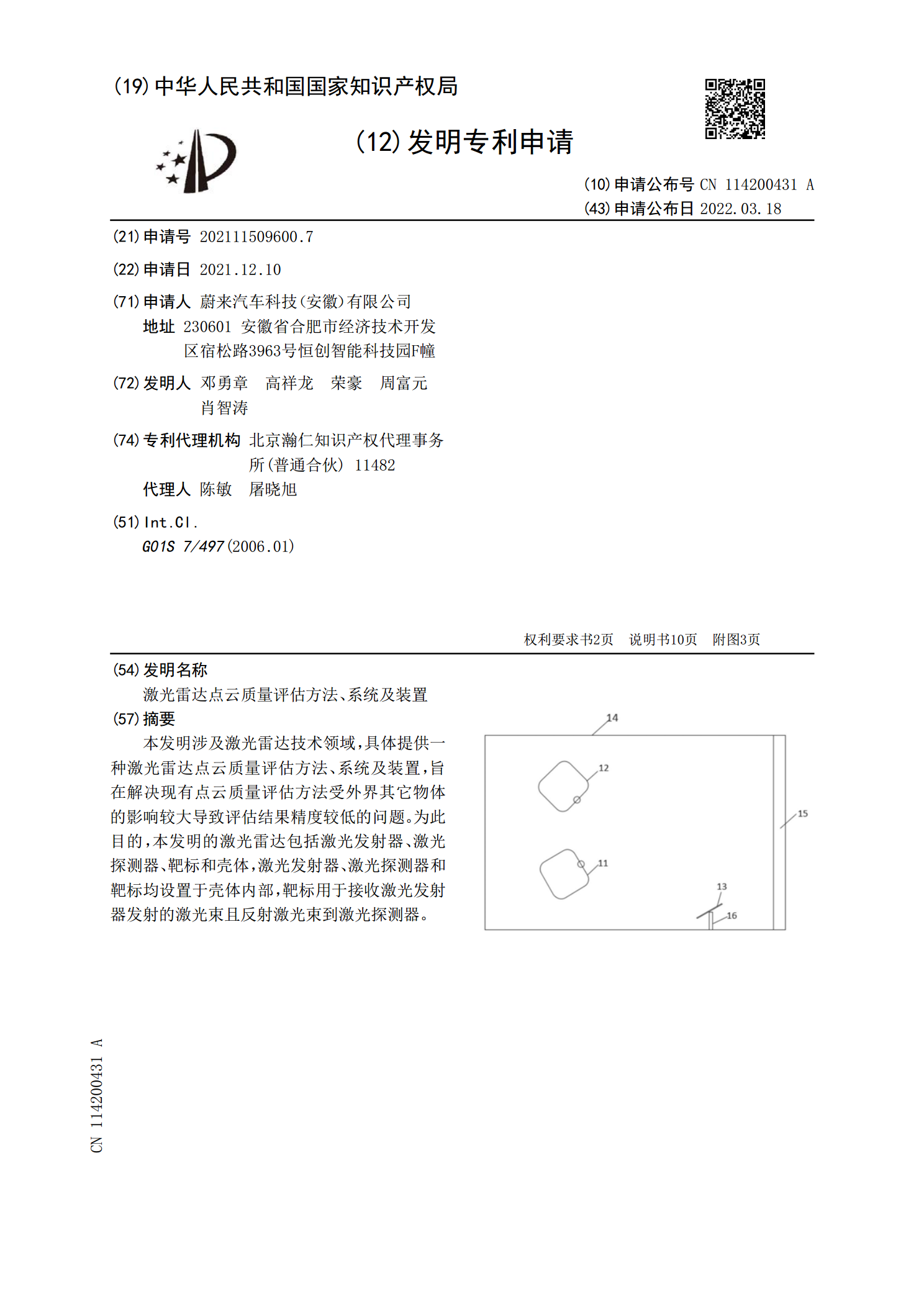
本发明涉及激光雷达技术领域,具体提供一种激光雷达点云质量评估方法、系统及装置,旨在解决现有点云质量评估方法受外界其它物体的影响较大导致评估结果精度较低的问题。为此目的,本发明的激光雷达包括激光发射器、激光探测器、靶标和壳体,激光发射器、激光探测器和靶标均设置于壳体内部,靶标用于接收激光发射器发射的激光束且反射激光束到激光探测器。

激光雷达点云目标检测方法、系统及装置.pdf
本发明公开了一种激光雷达点云目标检测方法,对点云信息构建前视图栅格,分别对前视图栅格提取特征以及对每一个前视图栅格内最近点提取点特征并结合,再通过三维目标检测器检测障碍物。本发明对高分辨率点云信息能够有好的保留,使得检测性能更好。