
一种采用激光扫描的目标定位方法及装置.pdf

a是****澜吖


1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种采用激光扫描的目标定位方法及装置.pdf
本发明公开一种采用激光扫描的目标定位方法,包括:针对激光发射装置的N个激光旋转扫描装置中的任意一个激光旋转扫描装置,在所述激光旋转扫描装置的每个扫描周期内,确定出第一参考时间和第二参考时间;所述激光接收装置根据所述第一参考时间和第二参考时间,以及预设的与所述第一参考时间对应的角度同步信号的第一角度和预设的与所述第二参考时间对应的角度同步信号的第二角度,确定出与所述第一时间对应的所述激光旋转扫描装置的第一电机旋转角速度;计算得到所述激光旋转扫描装置的旋转角度;所述激光接收装置根据N个激光旋转扫描装置的旋转角

一种采用激光扫描的目标定位方法及装置.pdf
本发明公开了一种采用激光扫描的目标定位方法及装置。所述方法包括:获取被激光扫描基站扫描到的第一激光接收装置在世界坐标系中的第一坐标,然后在待定位目标的局部坐标系中确定待定位目标中预先设置的定位点和第一激光接收装置之间的第一相对位置关系,进而根据待定位目标的姿态信息,确定第一相对位置关系在世界坐标系下的第一修正位置关系,最后可以根据第一坐标及所述第一修正位置关系,确定定位点在世界坐标系中的第三坐标,并将所述第三坐标作为待定位目标所在的位置。如此,可以解决现有技术中多个激光接收装置解算出的定位结果不同而导致待

一种采用激光扫描的目标定位方法及激光接收装置.pdf
本发明涉及电子技术领域,尤其涉及一种采用激光扫描的目标定位方法及激光接收装置,包括:激光接收装置记录接收到第一激光旋转扫描装置发射的同步信号的第一时间及接收到激光信号的第二时间,确定接收时长并根据接收时长确定第一激光旋转扫描装置的旋转角度,根据N个激光旋转扫描装置的旋转角度确定激光接收装置的位置(与目标对象位置相同),第一激光旋转扫描装置为激光发射装置的N个激光旋转扫描装置中的任一个,N大于等于3。该方法只需要至少三个激光旋转扫描装置,即可实现对激光接收装置定位,对光、机、电要求不高,并且激光接收装置中的
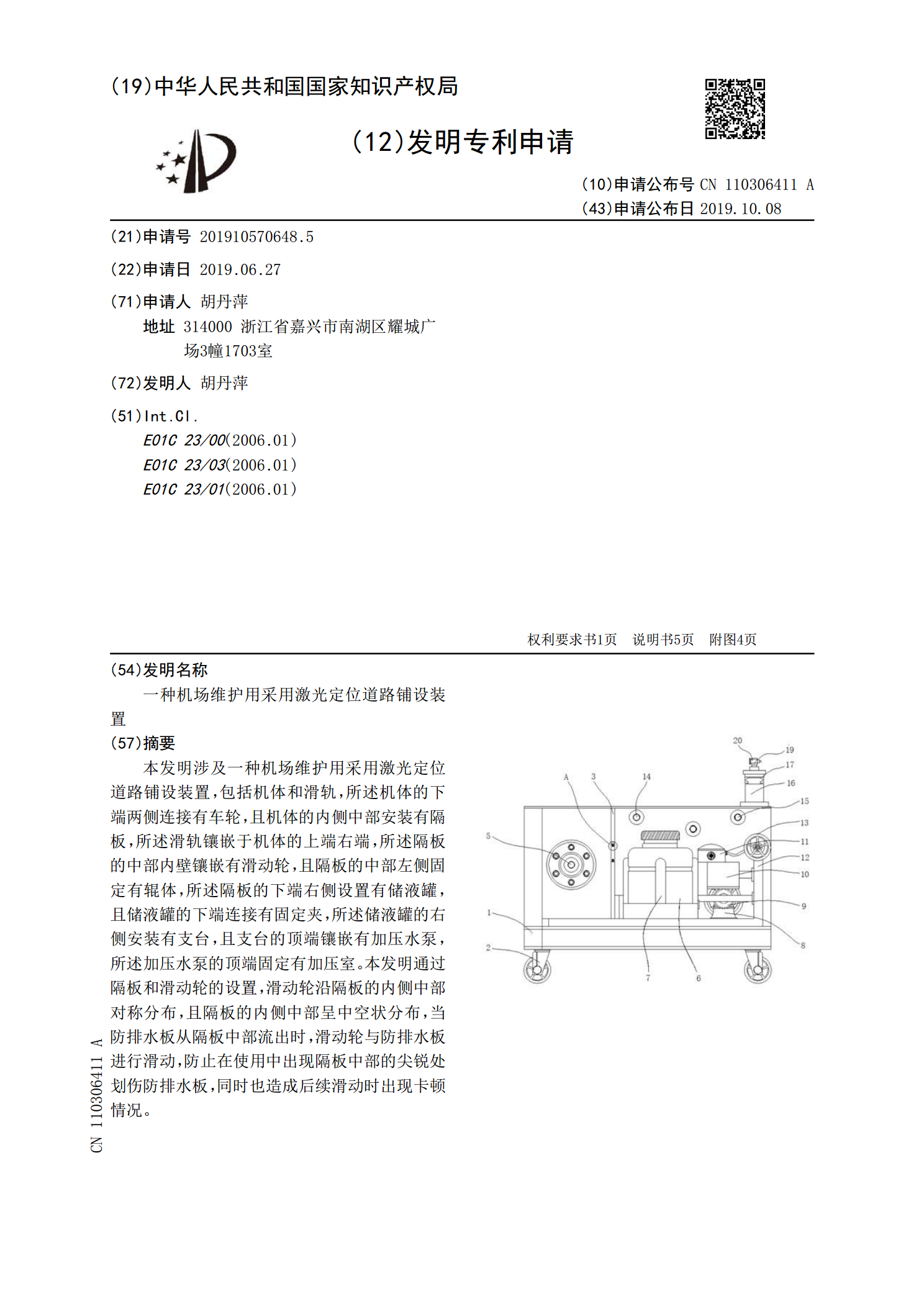
一种机场维护用采用激光定位道路铺设装置.pdf
本发明涉及一种机场维护用采用激光定位道路铺设装置,包括机体和滑轨,所述机体的下端两侧连接有车轮,且机体的内侧中部安装有隔板,所述滑轨镶嵌于机体的上端右端,所述隔板的中部内壁镶嵌有滑动轮,且隔板的中部左侧固定有辊体,所述隔板的下端右侧设置有储液罐,且储液罐的下端连接有固定夹,所述储液罐的右侧安装有支台,且支台的顶端镶嵌有加压水泵,所述加压水泵的顶端固定有加压室。本发明通过隔板和滑动轮的设置,滑动轮沿隔板的内侧中部对称分布,且隔板的内侧中部呈中空状分布,当防排水板从隔板中部流出时,滑动轮与防排水板进行滑动,防

采用激光旋转扫描的面型测量装置.pdf
本发明涉及一种采用激光旋转扫描的面型测量装置,由一维滑台系统、激光旋转扫描系统和双目视觉测量系统组成,所述一维滑台系统由旋转步进电机、电机支撑座、联轴器、前支撑块、滚珠丝杆、光轴、直线滑台、后支撑座和底座组成,所述激光旋转扫描系统由螺杆、螺杆套筒、连杆、激光器套筒、激光器、旋转步进电机、多面体旋转镜、电机支架组成,所述的双目视觉测量系统由底板、相机、支杆、紧定螺钉组成。本发明采用第二旋转步进电机带动多面体旋转镜旋转,激光器发射的激光打在多面体旋转镜的反射镜上,反射镜反射激光点打到被测面上。两台相机同时对打