
一种基于沉浸式机器人的娱乐互动系统及方法.pdf

秋花****姐姐


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于沉浸式机器人的娱乐互动系统及方法.pdf
本发明提供了一种基于沉浸式机器人的娱乐互动系统,云端服务器至少包括分别与移动智能端和机器人进行信息交互的射击控制模块,以及分别与射击控制模块和机器人进行信息交互的行驶路径规划模块。射击控制模块被配置为:基于移动智能端采集到的第一模拟激光发射接收信息和/或机器人采集到的第二模拟激光发射接收信息以及采集到的实时射击频率信息进行信息分析并生成用户的射击频率控制参数,并且将该射击频率控制参数输出至机器人以控制机器人的射击频率。行驶路径规划模块被配置为:获取对机器人进行躲避路线规划的环境监测信息,并基于得到的用户等
一种沉浸式互动场景实现方法及系统.pdf
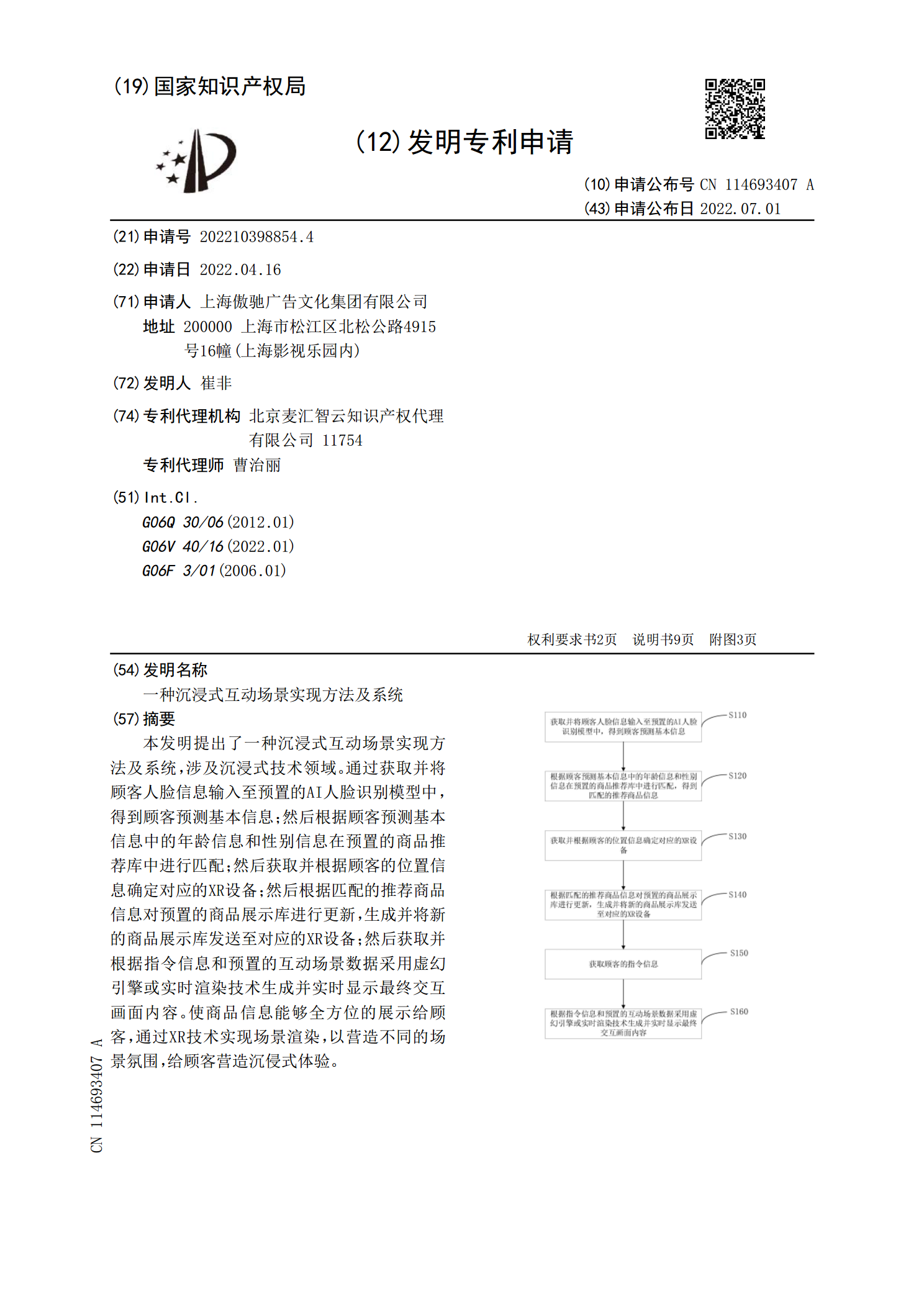
本发明提出了一种沉浸式互动场景实现方法及系统,涉及沉浸式技术领域。通过获取并将顾客人脸信息输入至预置的AI人脸识别模型中,得到顾客预测基本信息;然后根据顾客预测基本信息中的年龄信息和性别信息在预置的商品推荐库中进行匹配;然后获取并根据顾客的位置信息确定对应的XR设备;然后根据匹配的推荐商品信息对预置的商品展示库进行更新,生成并将新的商品展示库发送至对应的XR设备;然后获取并根据指令信息和预置的互动场景数据采用虚幻引擎或实时渲染技术生成并实时显示最终交互画面内容。使商品信息能够全方位的展示给顾客,通过XR技

基于XR技术的沉浸式互动直播构建方法、系统及介质.pdf
本发明公开了一种基于XR技术的沉浸式互动直播构建方法、系统及介质,该方法包括:设定直播虚拟场景的直播三维成像区间以及直播虚拟场景坐标系与基准观众视场坐标系的旋转缩放平移关系;计算基准观众在直播虚拟场景中的瞳距与观看位姿;渲染生成直播虚拟场景的直播三维成像区间的立体视觉直播画面,并把立体视觉直播画面发送给各观众;任意观众接收立体视觉直播画面,和/或立体视觉直播画面与观众体验空间其它体验内容的立体视觉画面合成为边看虚拟场景直播边进行其它内容体验的立体视觉画面,画面显示给观众看;观众与直播虚拟场景进行互动。本发

一种基于娱乐设备的信息互动方法及系统.pdf
本发明提供一种基于娱乐设备的信息互动方法及系统,上述方法包括以下步骤:娱乐设备运行时,记录终端用户预设时段内操作成功总次数,获取对应的分数值并将所述分数值发送至第三方网络平台;所述第三方网络平台接收所述分数值后,按照预设信息互动策略进行处理,实现了用户在玩游戏的同时,获取对应的可选择的奖励,大大提升了用户体验。
一种基于物联网的室内娱乐互动系统与方法.pdf
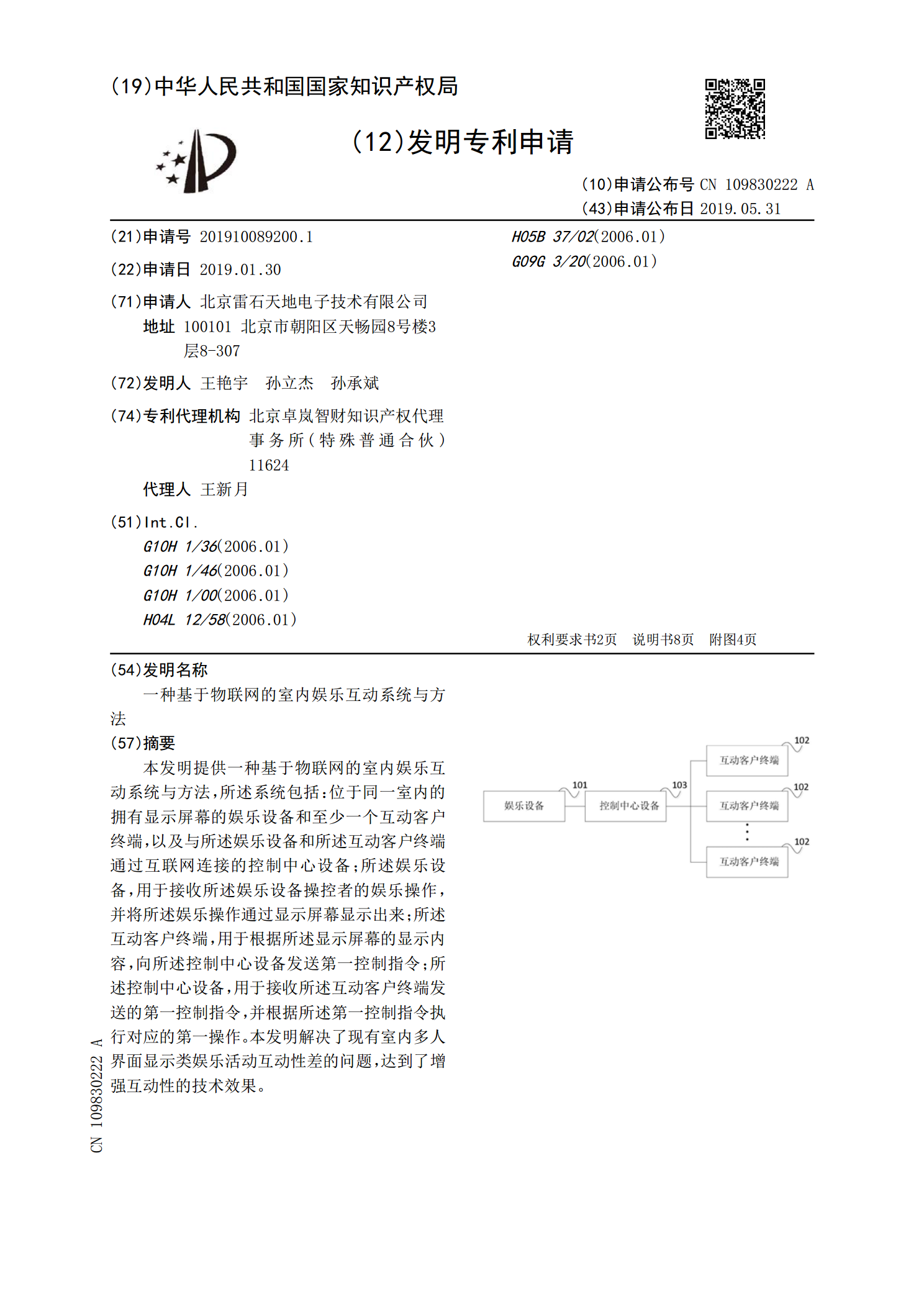
本发明提供一种基于物联网的室内娱乐互动系统与方法,所述系统包括:位于同一室内的拥有显示屏幕的娱乐设备和至少一个互动客户终端,以及与所述娱乐设备和所述互动客户终端通过互联网连接的控制中心设备;所述娱乐设备,用于接收所述娱乐设备操控者的娱乐操作,并将所述娱乐操作通过显示屏幕显示出来;所述互动客户终端,用于根据所述显示屏幕的显示内容,向所述控制中心设备发送第一控制指令;所述控制中心设备,用于接收所述互动客户终端发送的第一控制指令,并根据所述第一控制指令执行对应的第一操作。本发明解决了现有室内多人界面显示类娱乐活