
机械手爪及具有该机械手爪的机器人.pdf

邻家****66


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械手爪及具有该机械手爪的机器人.pdf
本发明公开了一种机械手爪及具有该机械手爪的机器人,包括手爪主体(1)、舵机(2)、第一爪(3)和第二爪(4);舵机固定安装在手爪主体(1)内;第一爪固定连接在手爪主体(1)上;舵机的输出轴(202)上连接有连接件(7),连接件上设有连接轴(8),第二爪(4)转动连接在连接轴(8)上,连接轴(8)还安装有扭簧(9),扭簧(9)的一端与连接件(7)连接,扭簧(9)的另一端与第二爪(4)连接;舵机(2)运行带动第二爪(4)与第一爪(3)开或合。该机械手爪抓取效果好、与人交互安全性高、稳定性好且较容易匹配到机器人

机器人手爪及具有该机器人手爪的机器人.pdf
本发明公开了一种机器人手爪,包括壳体及手爪,所述的壳体内设有驱动装置;所述的手爪包括第一爪(3)和第二爪(4),所述的第一爪(3)固定连接在所述的壳体上,所述的第二爪(4)包括连接部及爪部;所述的驱动装置驱动所述的连接部转动,所述的爪部铰接在所述的连接部上,所述的爪部与所述的连接部的铰接处设有柔性补偿结构;所述的驱动装置驱动所述的连接部转动使所述的第一爪(3)和第二爪(4)开或合。该机器人的手爪抓取效果好、与人交互安全性高、稳定性好且较容易匹配。
一种具有自锁功能的机器人机械手爪.pdf
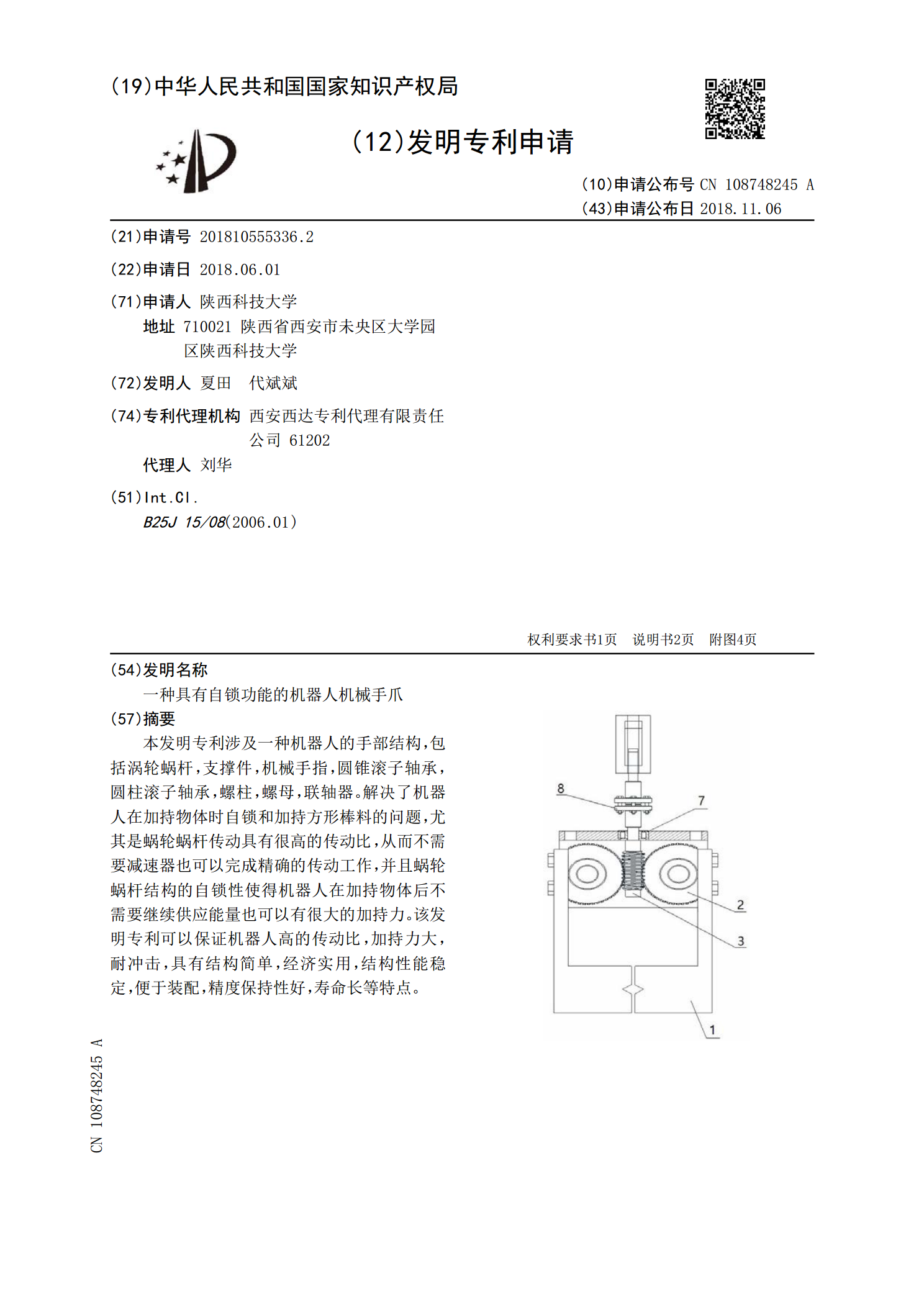
本发明专利涉及一种机器人的手部结构,包括涡轮蜗杆,支撑件,机械手指,圆锥滚子轴承,圆柱滚子轴承,螺柱,螺母,联轴器。解决了机器人在加持物体时自锁和加持方形棒料的问题,尤其是蜗轮蜗杆传动具有很高的传动比,从而不需要减速器也可以完成精确的传动工作,并且蜗轮蜗杆结构的自锁性使得机器人在加持物体后不需要继续供应能量也可以有很大的加持力。该发明专利可以保证机器人高的传动比,加持力大,耐冲击,具有结构简单,经济实用,结构性能稳定,便于装配,精度保持性好,寿命长等特点。

搬运机器人机械手爪机构.pdf
本发明公开了搬运机器人机械手爪机构,包括舵机和机械手爪单元,机械手爪单元包括两相啮合的齿轮部分,每个齿轮部分上都偏心固设有手爪,手爪部呈V形结构,两手爪的手爪部之V形开口相面对,舵机带动两齿轮部分反向同步转动,带动两手爪相向偏心摆动以夹取货物,或,背向偏心摆动以松抓货物,结构紧凑,所需让位空间小,在狭小空间以能抓取货物弧松抓货物,抓取力度大,抓取稳定可靠。

空间机器人手爪机构.pdf
空间机器人手爪机构,一种机械臂的末端执行器。本发明解决了以往手爪机构抓捕范围小、锁紧位置不唯一、抓捕过程中易丢失目标等问题,同时大大简化了整个机构,工艺性也得到了改善。其结构为手掌面1、上轴承座3和下轴承座4和箱底7构成了整个机构的基本骨架。两手指轴9安装在手掌面1与上轴承座3之间的轴承孔中,两手指2、5固连在手指轴9上,且两手指轴的轴端装有齿轮19。上轴承座3与下轴承座4之间的通孔装有电机11和制动轴22。制动轴22、电机11轴端装有齿轮21。手爪箱底7通过法兰与轴承座和外部机构相连。箱壁6与手掌面1、