
机器人关节结构.pdf

Ch****75


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人关节结构.pdf
本发明的一方面提供了一种机器人关节结构。该关节结构包括:关节单元,其包括连接至主体侧连杆的第一部分和连接至外周侧连杆的第二部分;驱动力传递机构,其将旋转驱动力传递到关节单元,以引起第二部分相对于第一部分的相对旋转;以及偏压装置,用于向第二部分施加与相对旋转同轴的旋转偏压力。
机器人关节限位结构及机器人.pdf
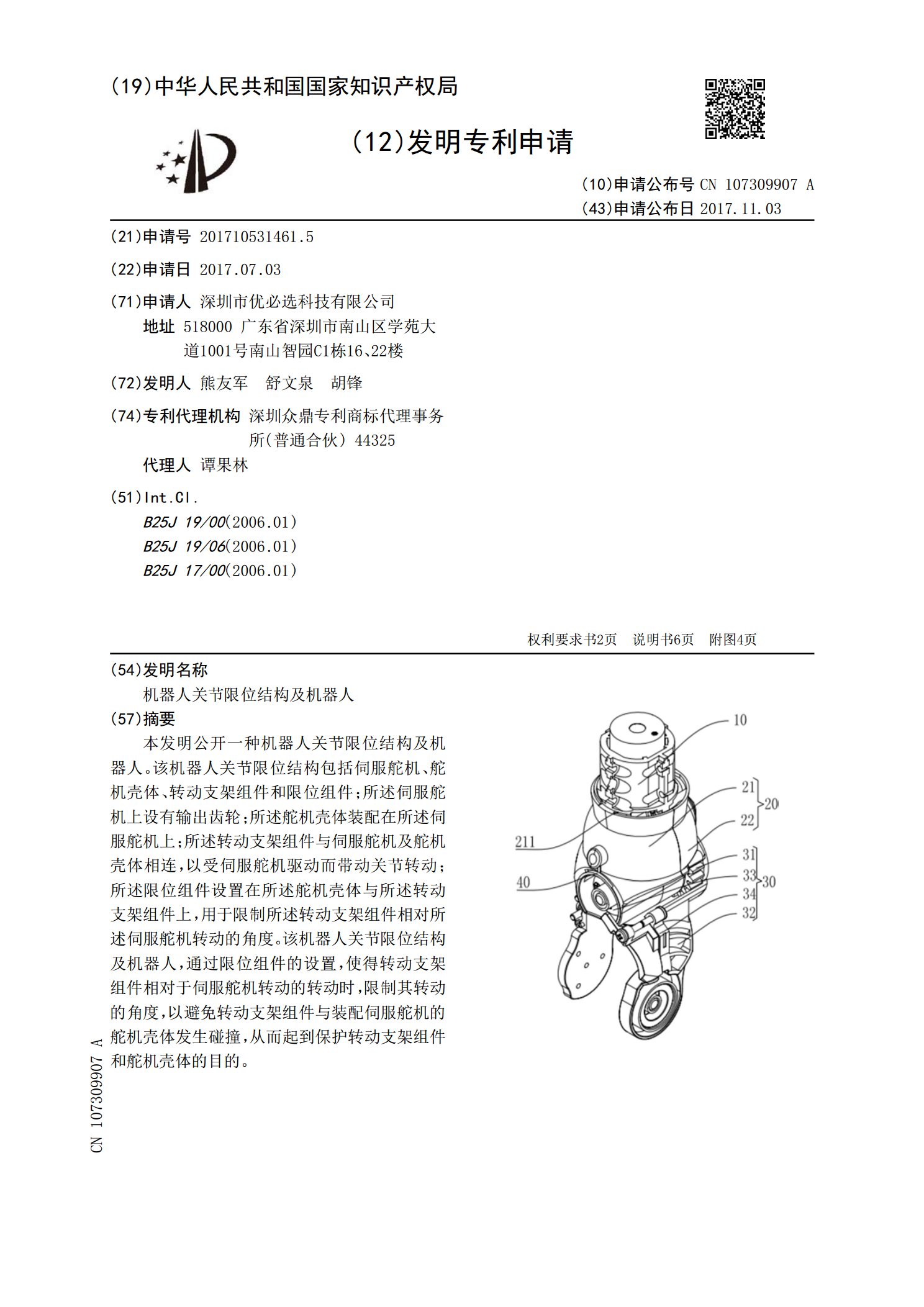
本发明公开一种机器人关节限位结构及机器人。该机器人关节限位结构包括伺服舵机、舵机壳体、转动支架组件和限位组件;所述伺服舵机上设有输出齿轮;所述舵机壳体装配在所述伺服舵机上;所述转动支架组件与伺服舵机及舵机壳体相连,以受伺服舵机驱动而带动关节转动;所述限位组件设置在所述舵机壳体与所述转动支架组件上,用于限制所述转动支架组件相对所述伺服舵机转动的角度。该机器人关节限位结构及机器人,通过限位组件的设置,使得转动支架组件相对于伺服舵机转动的转动时,限制其转动的角度,以避免转动支架组件与装配伺服舵机的舵机壳体发生碰

机器人关节结构及机器人关节结构的装配方法.pdf
本发明提供了一种机器人关节结构及机器人关节结构的装配方法,所述机器人关节结构包括摇臂和基座,其中,所述摇臂包括安装腔,所述机器人关节结构包括驱动电机、波发生器以及减速机刚柔轮构件,其中:所述波发生器安装到所述减速机刚柔轮构件;所述减速机刚柔轮构件以第一部分固定到所述摇臂、第二部分固定到所述基座的方式安装,且所述减速机刚柔轮构件位于所述安装腔的第一端开口;所述驱动电机由所述安装腔的第二端开口插入所述安装腔内并固定到所述摇臂,且所述驱动电机的输出轴直接与所述波发生器的内孔配合传动。本发明通过将驱动电机的输出轴

一种关节机器人的关节结构.pdf
本发明公开了一种关节机器人的关节结构,包括壳体、电机,以及谐波减速器;谐波减速器包括中空的输入轴、中空的椭圆形凸轮、薄壁轴承外壳、中空的刚轮、中空的柔轮、应变片;输入轴的一端与凸轮的一端固定连接;凸轮和薄壁轴承外壳之间设有球形滚动体,柔轮一端设有小模数外齿形,柔轮另一端为薄壁法兰;刚轮内壁和柔轮的一端相适配;薄壁轴承外壳与柔轮的内腔相适配;应变片固定连接在柔轮的侧壁上;刚轮通过螺钉安装于交叉滚子轴承的内圈上,交叉滚子轴承的外圈通过螺钉安装在壳体上;柔轮固定连接在壳体上;电机的定子与壳体固定连接,电机的转子
机器人关节驱动结构及机器人.pdf
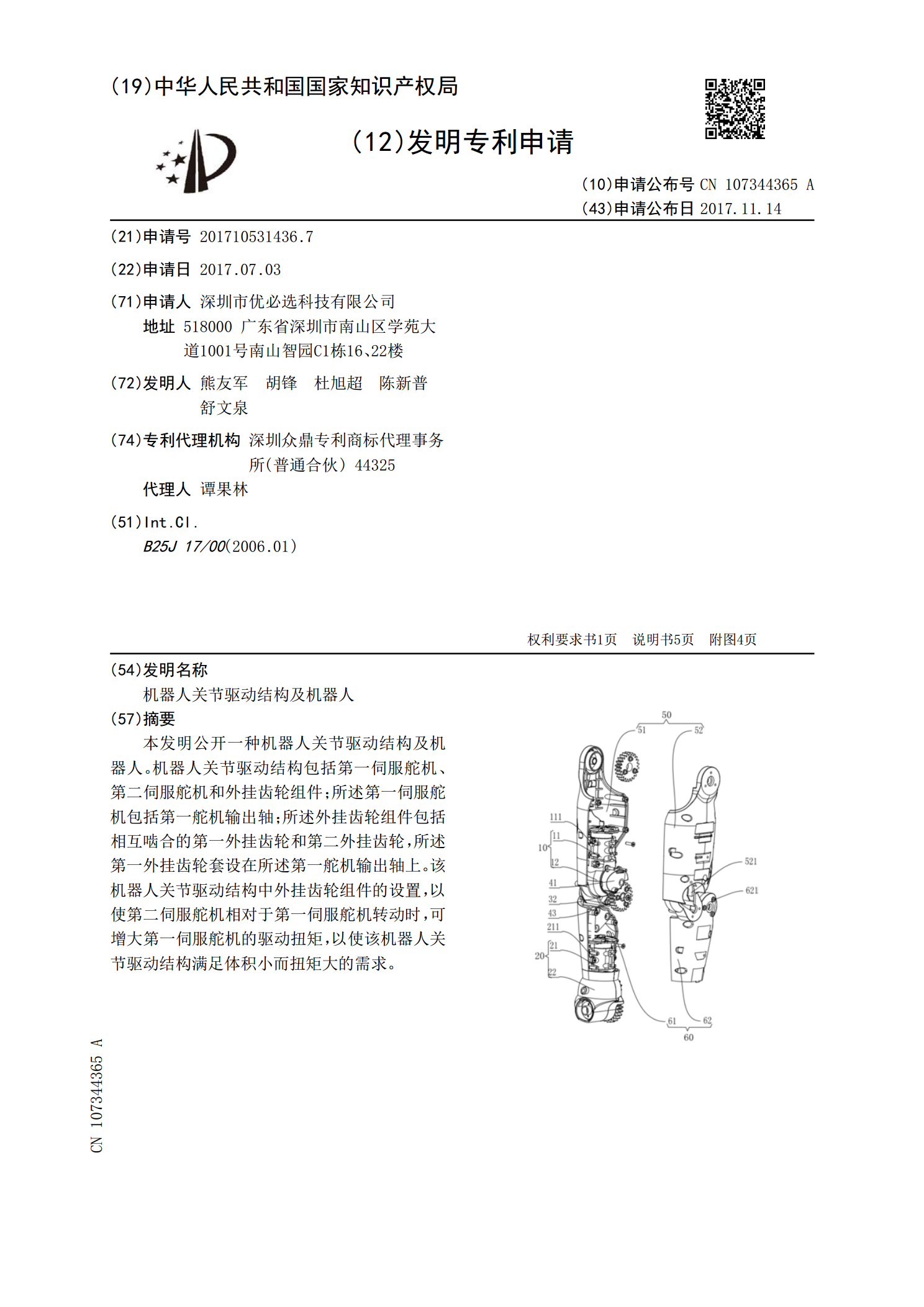
本发明公开一种机器人关节驱动结构及机器人。机器人关节驱动结构包括第一伺服舵机、第二伺服舵机和外挂齿轮组件;所述第一伺服舵机包括第一舵机输出轴;所述外挂齿轮组件包括相互啮合的第一外挂齿轮和第二外挂齿轮,所述第一外挂齿轮套设在所述第一舵机输出轴上。该机器人关节驱动结构中外挂齿轮组件的设置,以使第二伺服舵机相对于第一伺服舵机转动时,可增大第一伺服舵机的驱动扭矩,以使该机器人关节驱动结构满足体积小而扭矩大的需求。