
一种无人飞行器的控制方法、无人飞行器及存储介质.pdf

是你****芹呀


1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人飞行器的控制方法、无人飞行器及存储介质.pdf
一种无人飞行器的控制方法、无人飞行器及存储介质,其中,该方法包括:根据无人飞行器的传感器输出的传感数据确定障碍物与无人飞行器之间的距离(S201);当距离小于或等于预设距离阈值时,控制无人飞行器执行展示工作任务(S202),其中,无人飞行器不处于飞行状态,展示工作任务包括无人飞行器的指示灯按照预设模式工作,和/或无人飞行器的动力部件怠速工作。该方法可以在确保安全的基础上,增加无人飞行器和用户之间的互动乐趣,以达到吸引用户注意力的目的。
一种无人飞行器控制方法、系统、无人飞行器及介质.pdf
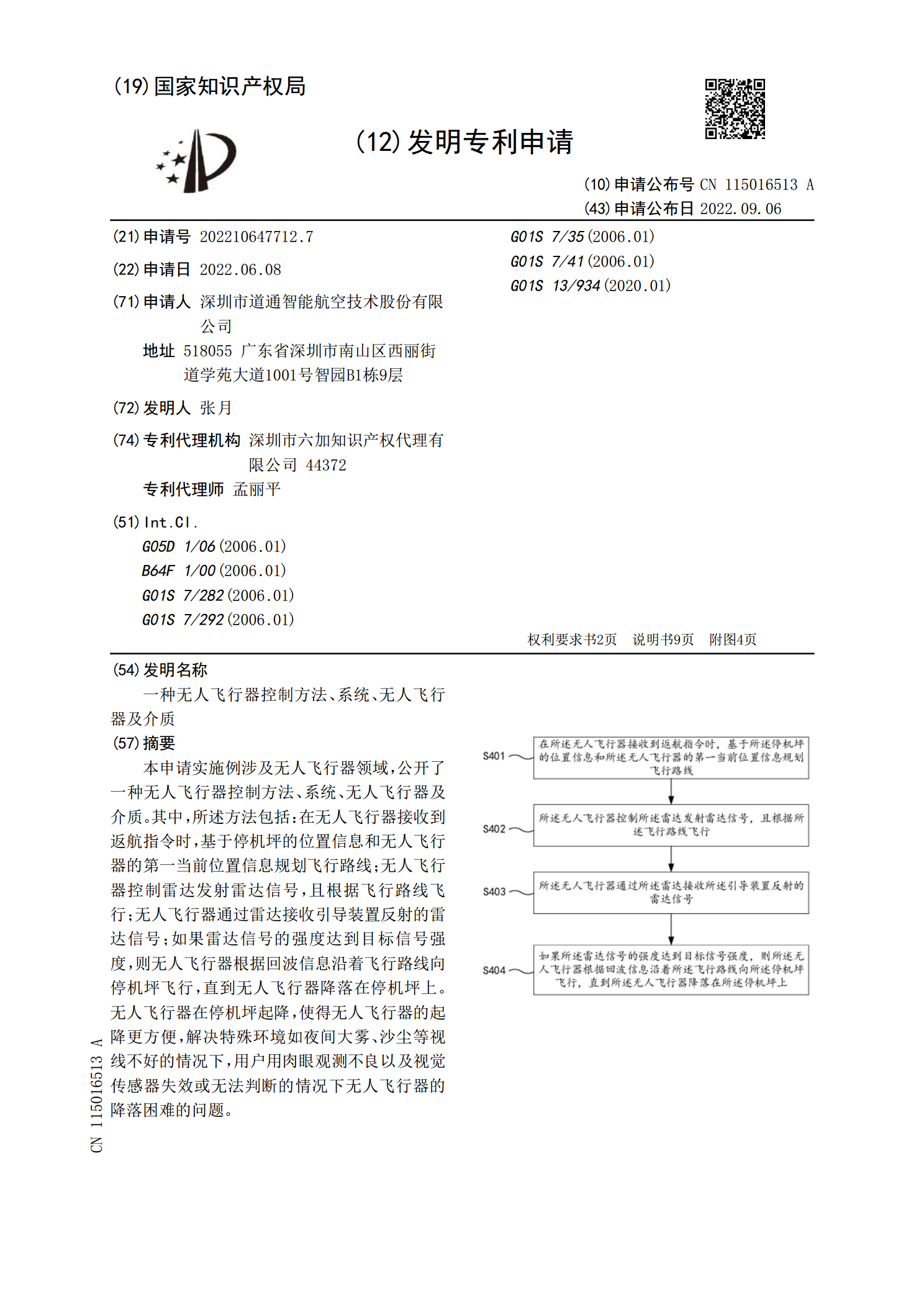
本申请实施例涉及无人飞行器领域,公开了一种无人飞行器控制方法、系统、无人飞行器及介质。其中,所述方法包括:在无人飞行器接收到返航指令时,基于停机坪的位置信息和无人飞行器的第一当前位置信息规划飞行路线;无人飞行器控制雷达发射雷达信号,且根据飞行路线飞行;无人飞行器通过雷达接收引导装置反射的雷达信号;如果雷达信号的强度达到目标信号强度,则无人飞行器根据回波信息沿着飞行路线向停机坪飞行,直到无人飞行器降落在停机坪上。无人飞行器在停机坪起降,使得无人飞行器的起降更方便,解决特殊环境如夜间大雾、沙尘等视线不好的情况
一种无人飞行器飞行控制方法、系统及无人飞行器.pdf
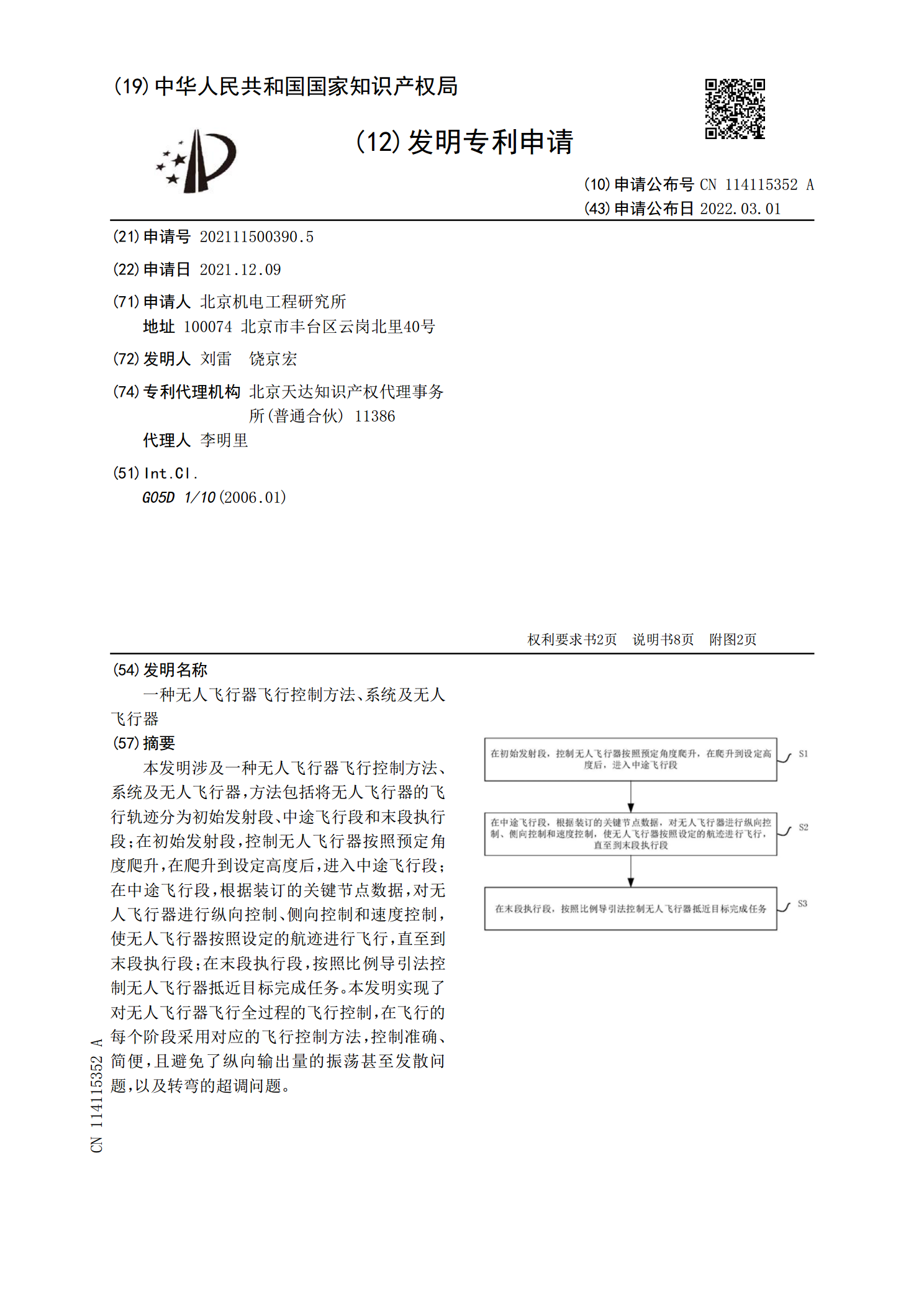
本发明涉及一种无人飞行器飞行控制方法、系统及无人飞行器,方法包括将无人飞行器的飞行轨迹分为初始发射段、中途飞行段和末段执行段;在初始发射段,控制无人飞行器按照预定角度爬升,在爬升到设定高度后,进入中途飞行段;在中途飞行段,根据装订的关键节点数据,对无人飞行器进行纵向控制、侧向控制和速度控制,使无人飞行器按照设定的航迹进行飞行,直至到末段执行段;在末段执行段,按照比例导引法控制无人飞行器抵近目标完成任务。本发明实现了对无人飞行器飞行全过程的飞行控制,在飞行的每个阶段采用对应的飞行控制方法,控制准确、简便,且

喷洒作业控制方法、装置、存储介质及农业无人飞行器.pdf
一种喷洒作业控制方法、装置、存储介质及农业无人飞行器,所述农业无人飞行器包括多个螺旋桨及多个喷头,每个螺旋桨下方设置至少一个喷头,所述方法包括:获取农业无人飞行器的飞行状态参数(S100);根据飞行状态参数,确定每个螺旋桨对应的目标倾斜角度;其中,目标倾斜角度下,农业无人飞行器在所述飞行状态下形成的喷幅为预设喷幅(S200);根据所述目标倾斜角度,调整螺旋桨的倾斜角度(S300);基于调整后的螺旋桨的倾斜角度进行喷洒作业(S400)。所述方法根据飞行状态对应调整螺旋桨的倾斜角度,使得在不同的飞行状态下,所
液体喷洒装置及其控制方法、无人飞行器和存储介质.pdf
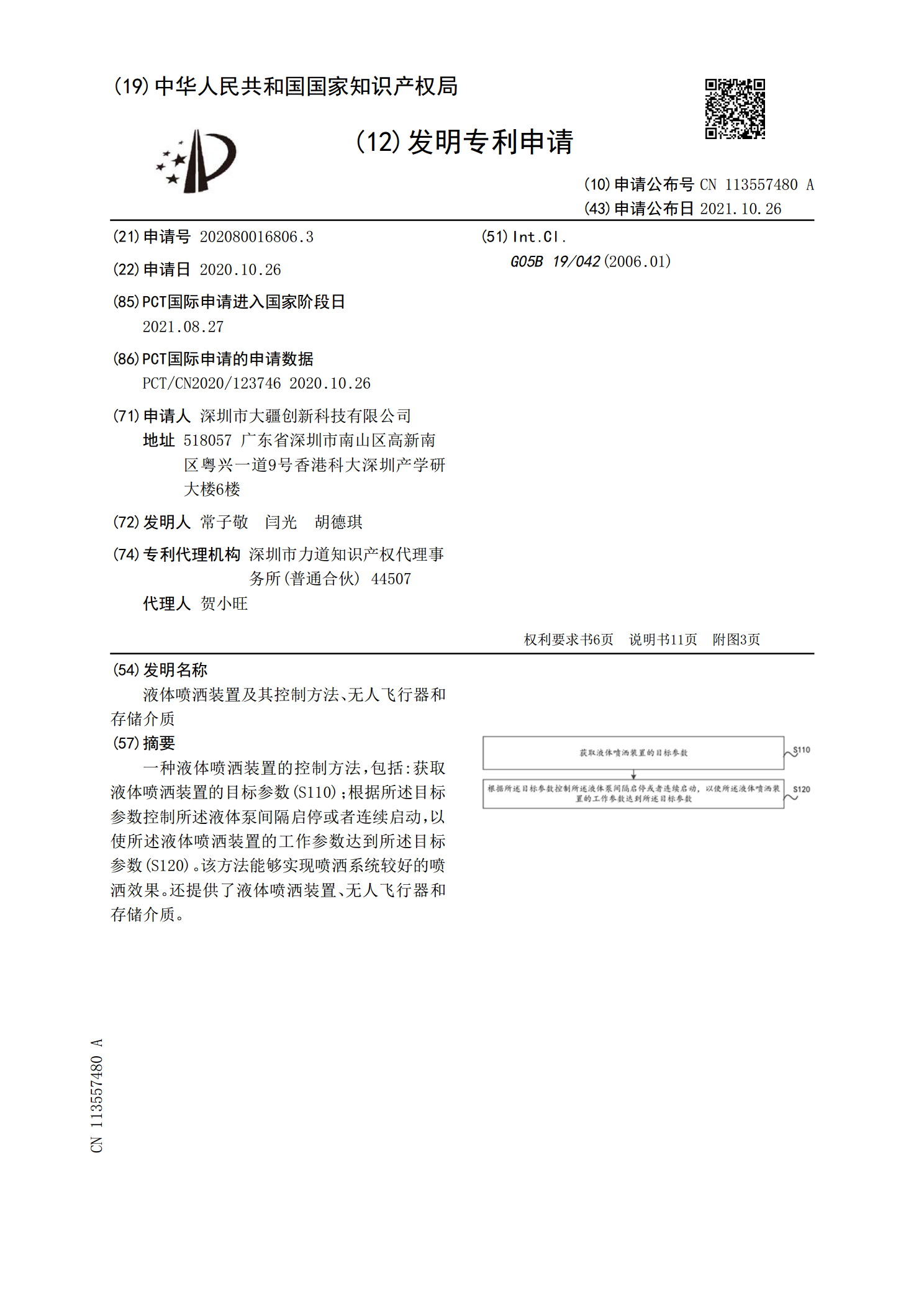
一种液体喷洒装置的控制方法,包括:获取液体喷洒装置的目标参数(S110);根据所述目标参数控制所述液体泵间隔启停或者连续启动,以使所述液体喷洒装置的工作参数达到所述目标参数(S120)。该方法能够实现喷洒系统较好的喷洒效果。还提供了液体喷洒装置、无人飞行器和存储介质。