
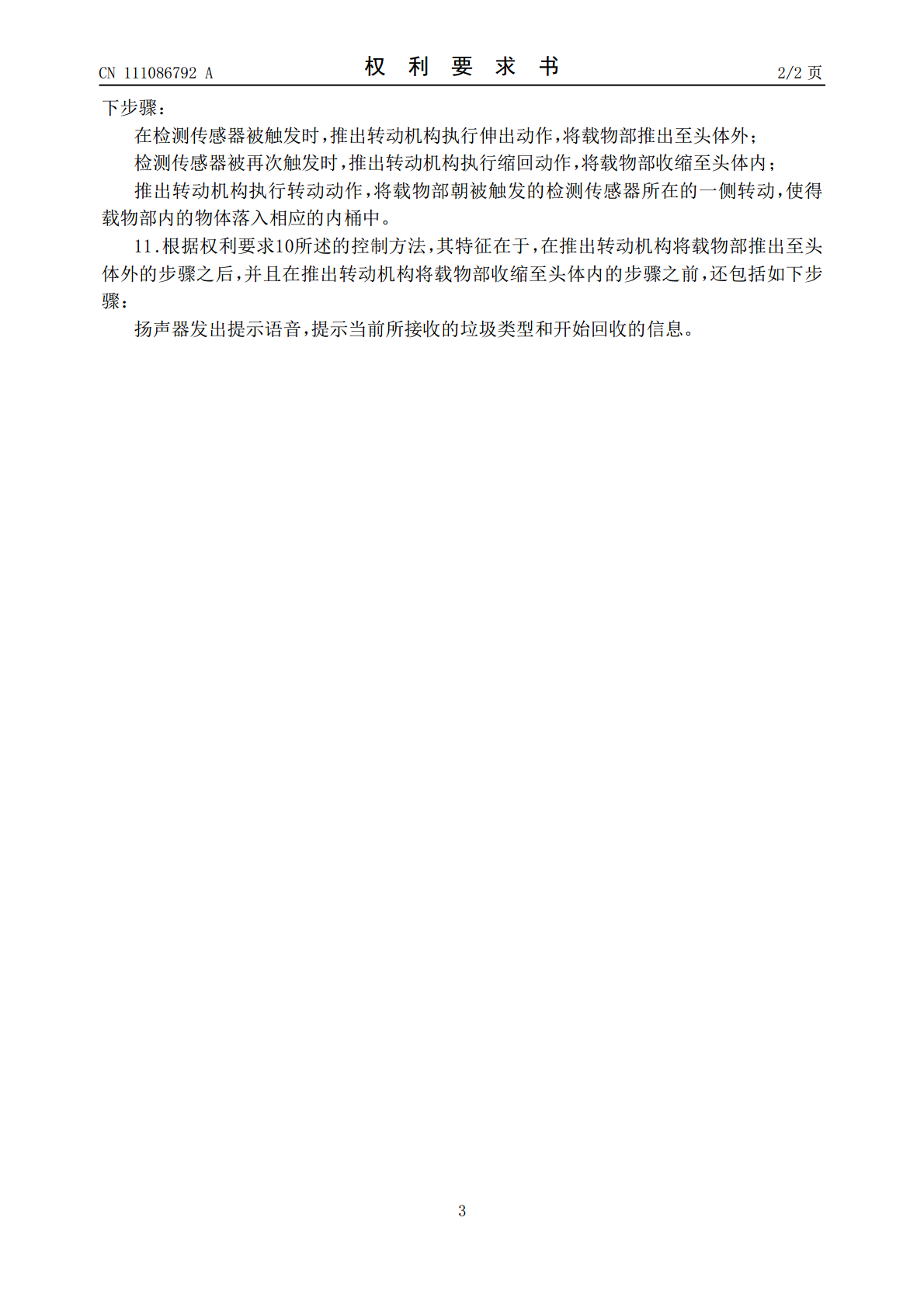
家用智能垃圾桶及其控制方法.pdf

俊英****22


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

家用智能垃圾桶及其控制方法.pdf
本发明公开了一种家用智能垃圾桶及其控制方法,所述家用智能垃圾桶采用圆柱形桶体作为身体,半圆形头体作为身体上的头部,还在头部上设置了眼部和口部,整体看起来就像一个卡通外形的智能机器人,改变了以往垃圾桶仅仅是一圆柱桶的呆板结构,将垃圾桶变成了家居环境中一个亮点,垃圾桶的实用性和实用价值也因此大大提高。此外,所述家用智能垃圾桶采用推出转动机构将载物部从口部推出和收回,使垃圾桶回收垃圾的过程拟化成机器人吃垃圾的动作,从而提升垃圾桶回收垃圾的娱乐性。并且,推出转动机构还能转动载物部,将不同的垃圾倒入对应的内桶中,实
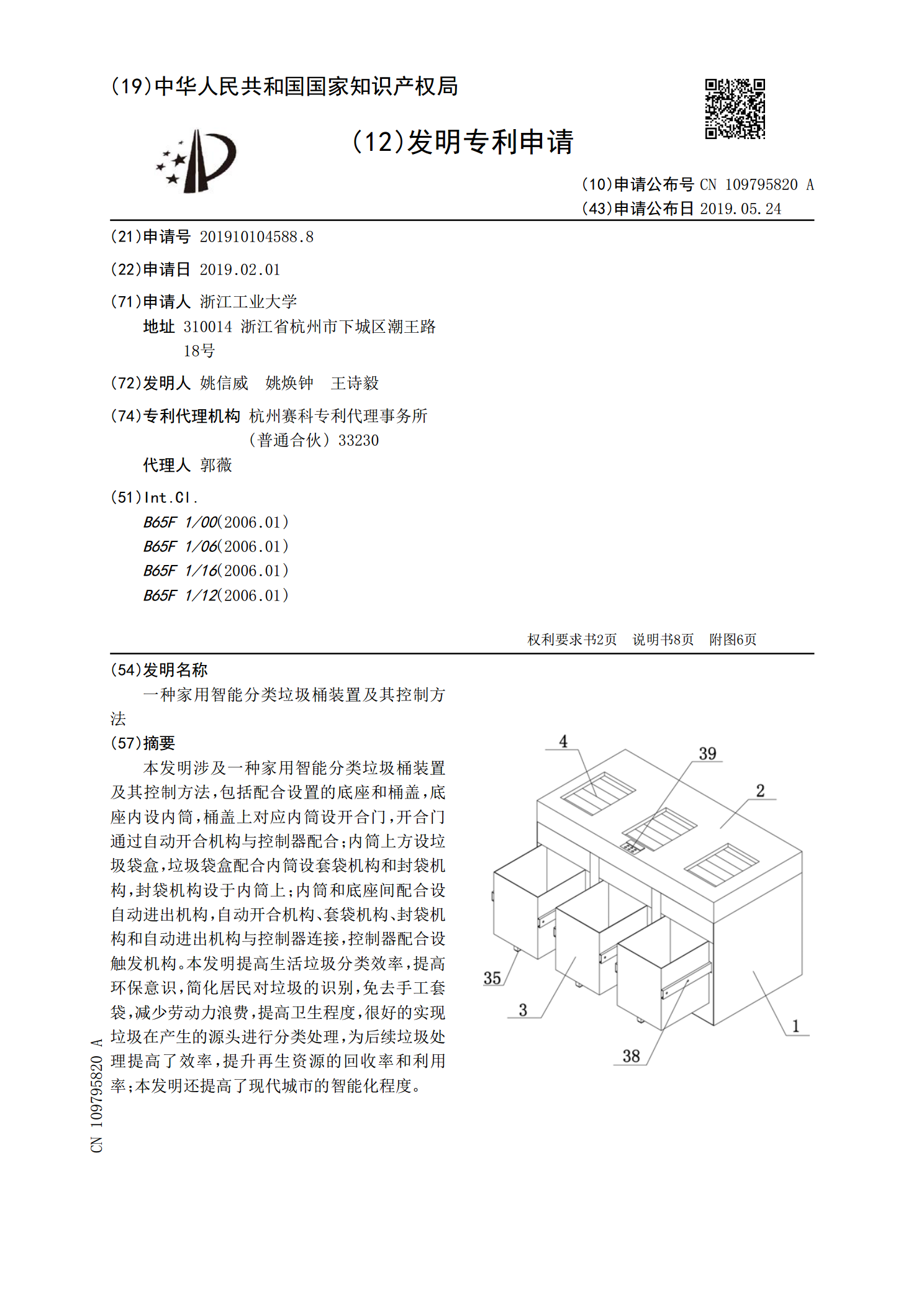
一种家用智能分类垃圾桶装置及其控制方法.pdf
本发明涉及一种家用智能分类垃圾桶装置及其控制方法,包括配合设置的底座和桶盖,底座内设内筒,桶盖上对应内筒设开合门,开合门通过自动开合机构与控制器配合;内筒上方设垃圾袋盒,垃圾袋盒配合内筒设套袋机构和封袋机构,封袋机构设于内筒上;内筒和底座间配合设自动进出机构,自动开合机构、套袋机构、封袋机构和自动进出机构与控制器连接,控制器配合设触发机构。本发明提高生活垃圾分类效率,提高环保意识,简化居民对垃圾的识别,免去手工套袋,减少劳动力浪费,提高卫生程度,很好的实现垃圾在产生的源头进行分类处理,为后续垃圾处理提高了
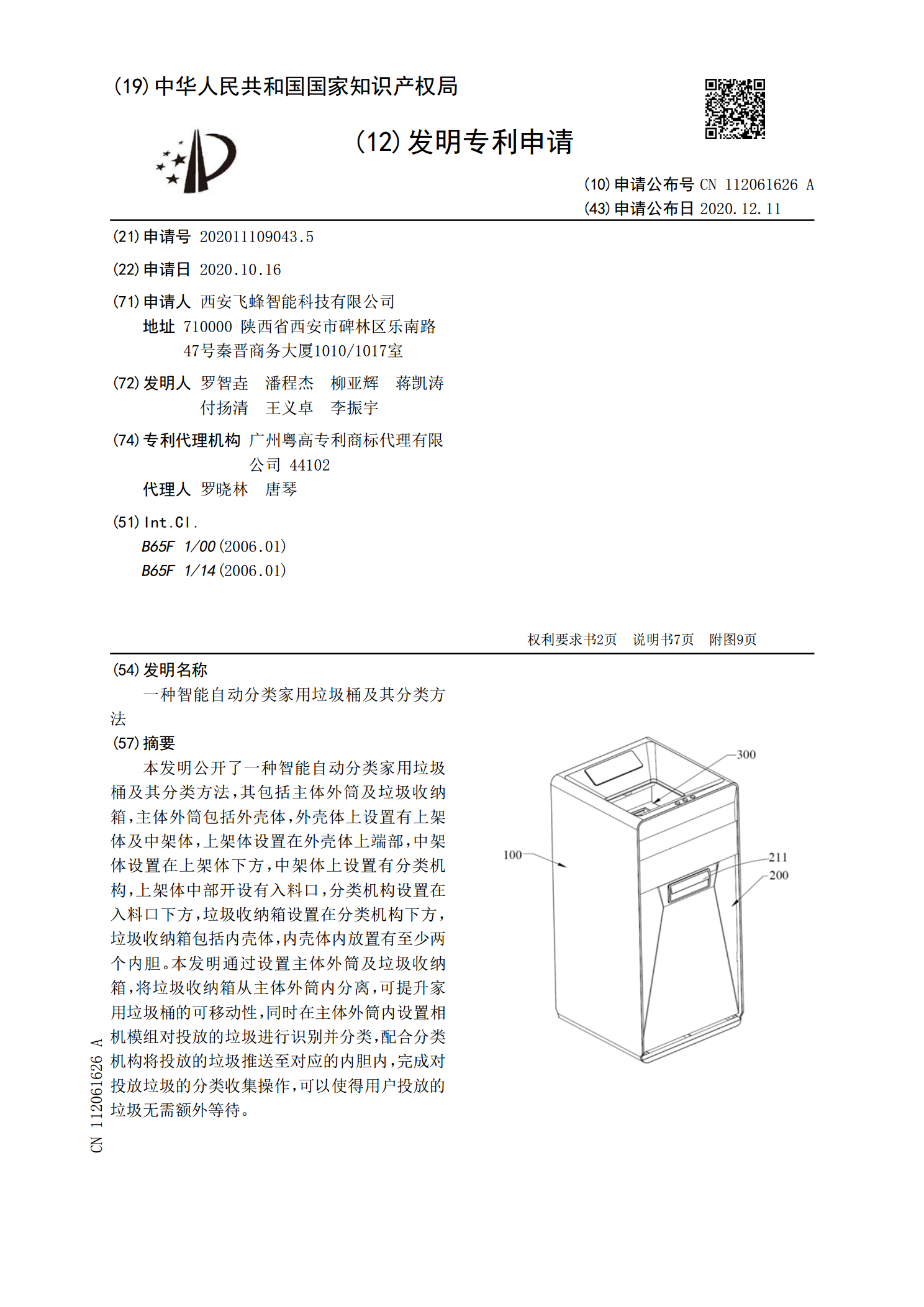
一种智能自动分类家用垃圾桶及其分类方法.pdf
本发明公开了一种智能自动分类家用垃圾桶及其分类方法,其包括主体外筒及垃圾收纳箱,主体外筒包括外壳体,外壳体上设置有上架体及中架体,上架体设置在外壳体上端部,中架体设置在上架体下方,中架体上设置有分类机构,上架体中部开设有入料口,分类机构设置在入料口下方,垃圾收纳箱设置在分类机构下方,垃圾收纳箱包括内壳体,内壳体内放置有至少两个内胆。本发明通过设置主体外筒及垃圾收纳箱,将垃圾收纳箱从主体外筒内分离,可提升家用垃圾桶的可移动性,同时在主体外筒内设置相机模组对投放的垃圾进行识别并分类,配合分类机构将投放的垃圾推
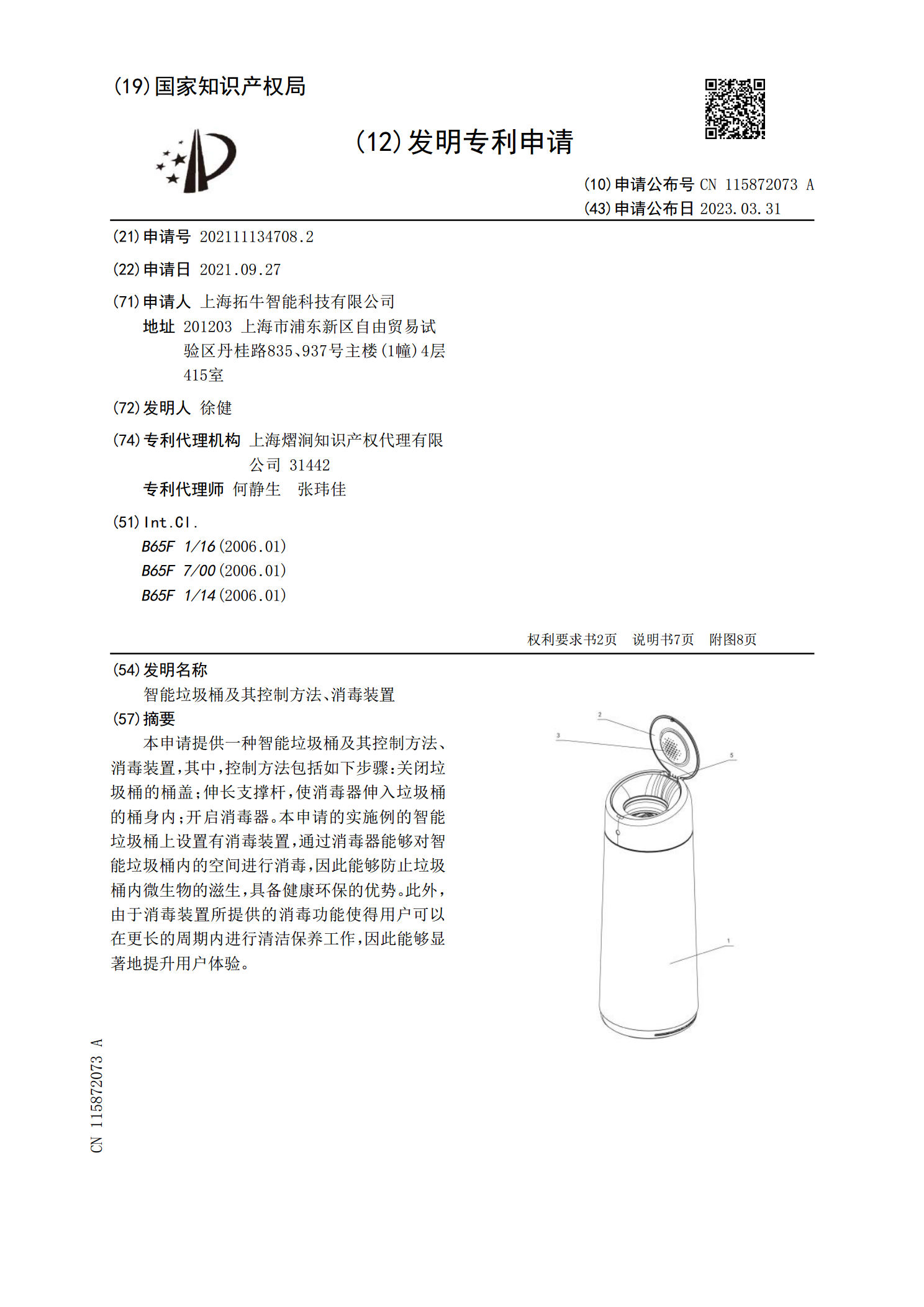
智能垃圾桶及其控制方法、消毒装置.pdf
本申请提供一种智能垃圾桶及其控制方法、消毒装置,其中,控制方法包括如下步骤:关闭垃圾桶的桶盖;伸长支撑杆,使消毒器伸入垃圾桶的桶身内;开启消毒器。本申请的实施例的智能垃圾桶上设置有消毒装置,通过消毒器能够对智能垃圾桶内的空间进行消毒,因此能够防止垃圾桶内微生物的滋生,具备健康环保的优势。此外,由于消毒装置所提供的消毒功能使得用户可以在更长的周期内进行清洁保养工作,因此能够显著地提升用户体验。
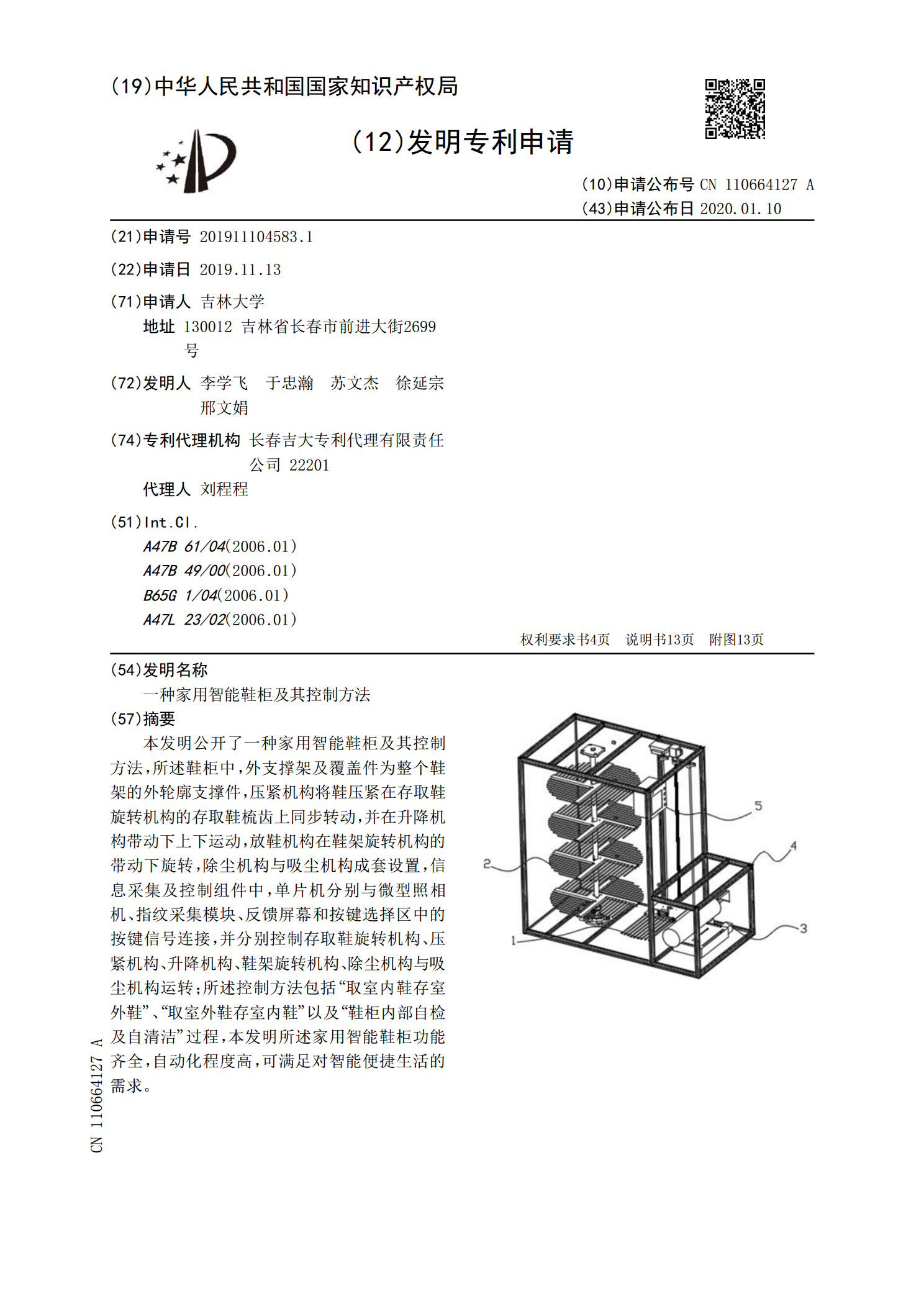
一种家用智能鞋柜及其控制方法.pdf
本发明公开了一种家用智能鞋柜及其控制方法,所述鞋柜中,外支撑架及覆盖件为整个鞋架的外轮廓支撑件,压紧机构将鞋压紧在存取鞋旋转机构的存取鞋梳齿上同步转动,并在升降机构带动下上下运动,放鞋机构在鞋架旋转机构的带动下旋转,除尘机构与吸尘机构成套设置,信息采集及控制组件中,单片机分别与微型照相机、指纹采集模块、反馈屏幕和按键选择区中的按键信号连接,并分别控制存取鞋旋转机构、压紧机构、升降机构、鞋架旋转机构、除尘机构与吸尘机构运转;所述控制方法包括“取室内鞋存室外鞋”、“取室外鞋存室内鞋”以及“鞋柜内部自检及自清洁