
一种智能自动分类家用垃圾桶及其分类方法.pdf

代瑶****zy


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能自动分类家用垃圾桶及其分类方法.pdf
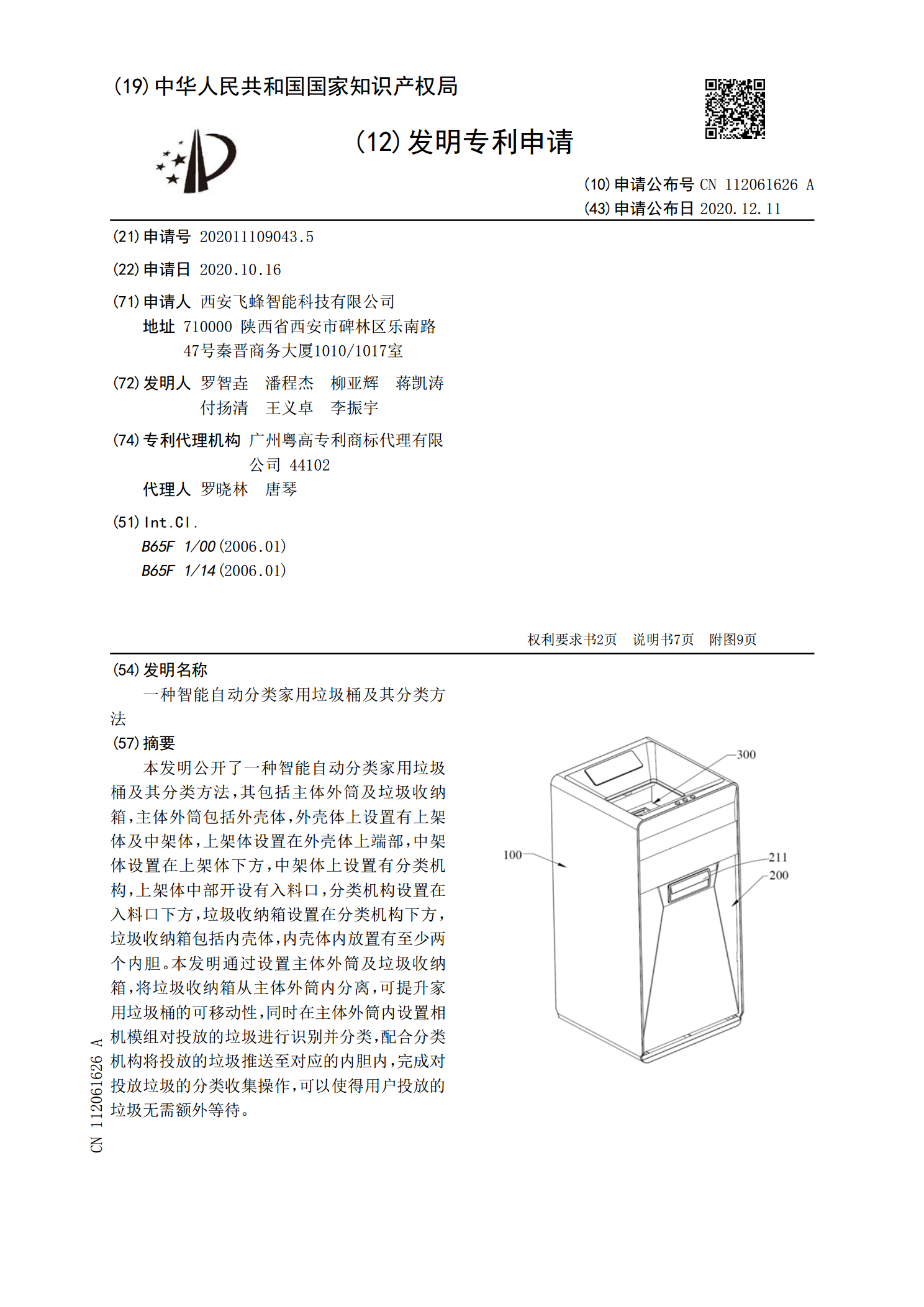
本发明公开了一种智能自动分类家用垃圾桶及其分类方法,其包括主体外筒及垃圾收纳箱,主体外筒包括外壳体,外壳体上设置有上架体及中架体,上架体设置在外壳体上端部,中架体设置在上架体下方,中架体上设置有分类机构,上架体中部开设有入料口,分类机构设置在入料口下方,垃圾收纳箱设置在分类机构下方,垃圾收纳箱包括内壳体,内壳体内放置有至少两个内胆。本发明通过设置主体外筒及垃圾收纳箱,将垃圾收纳箱从主体外筒内分离,可提升家用垃圾桶的可移动性,同时在主体外筒内设置相机模组对投放的垃圾进行识别并分类,配合分类机构将投放的垃圾推
一种家用智能分类垃圾桶装置及其控制方法.pdf
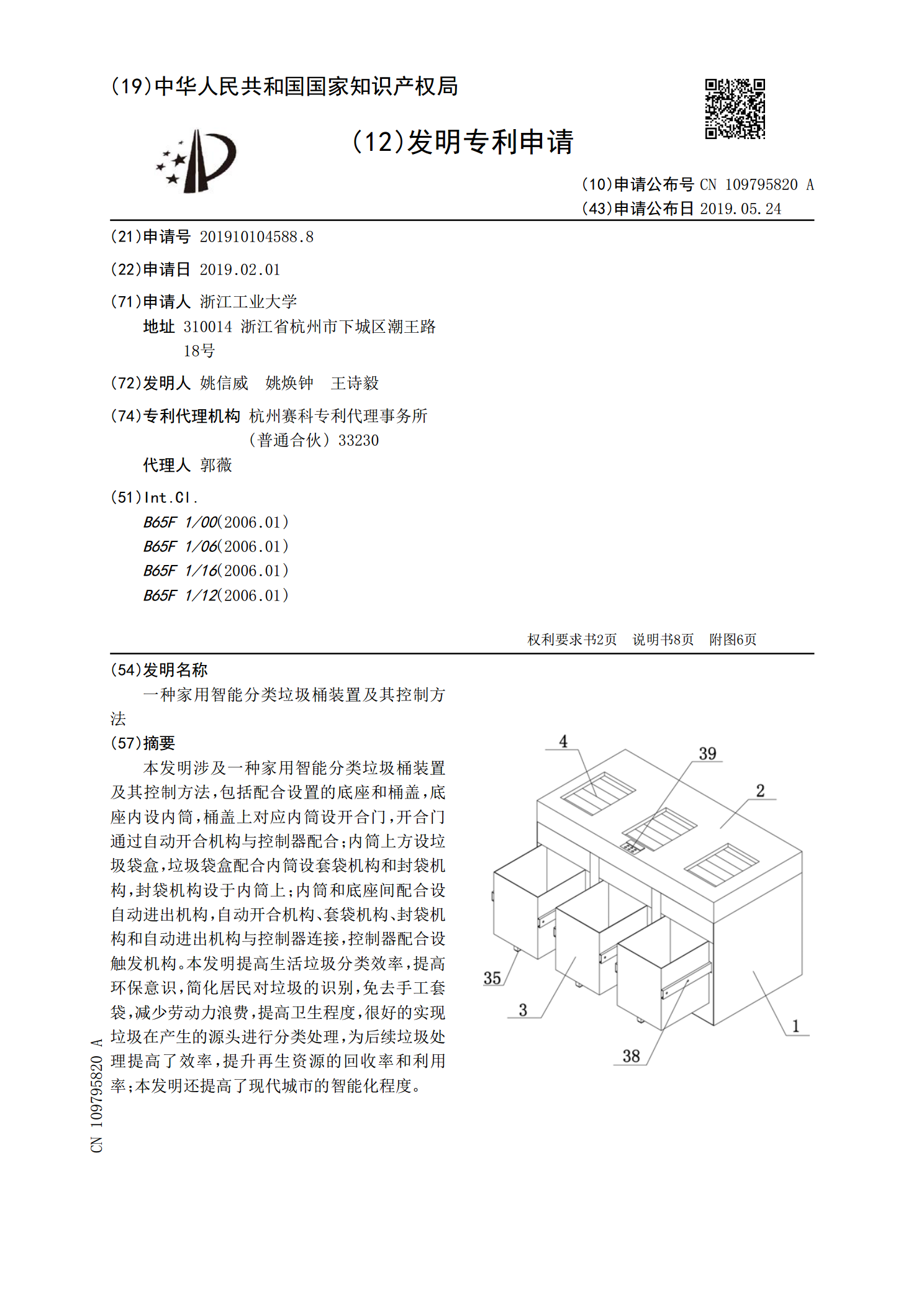
本发明涉及一种家用智能分类垃圾桶装置及其控制方法,包括配合设置的底座和桶盖,底座内设内筒,桶盖上对应内筒设开合门,开合门通过自动开合机构与控制器配合;内筒上方设垃圾袋盒,垃圾袋盒配合内筒设套袋机构和封袋机构,封袋机构设于内筒上;内筒和底座间配合设自动进出机构,自动开合机构、套袋机构、封袋机构和自动进出机构与控制器连接,控制器配合设触发机构。本发明提高生活垃圾分类效率,提高环保意识,简化居民对垃圾的识别,免去手工套袋,减少劳动力浪费,提高卫生程度,很好的实现垃圾在产生的源头进行分类处理,为后续垃圾处理提高了
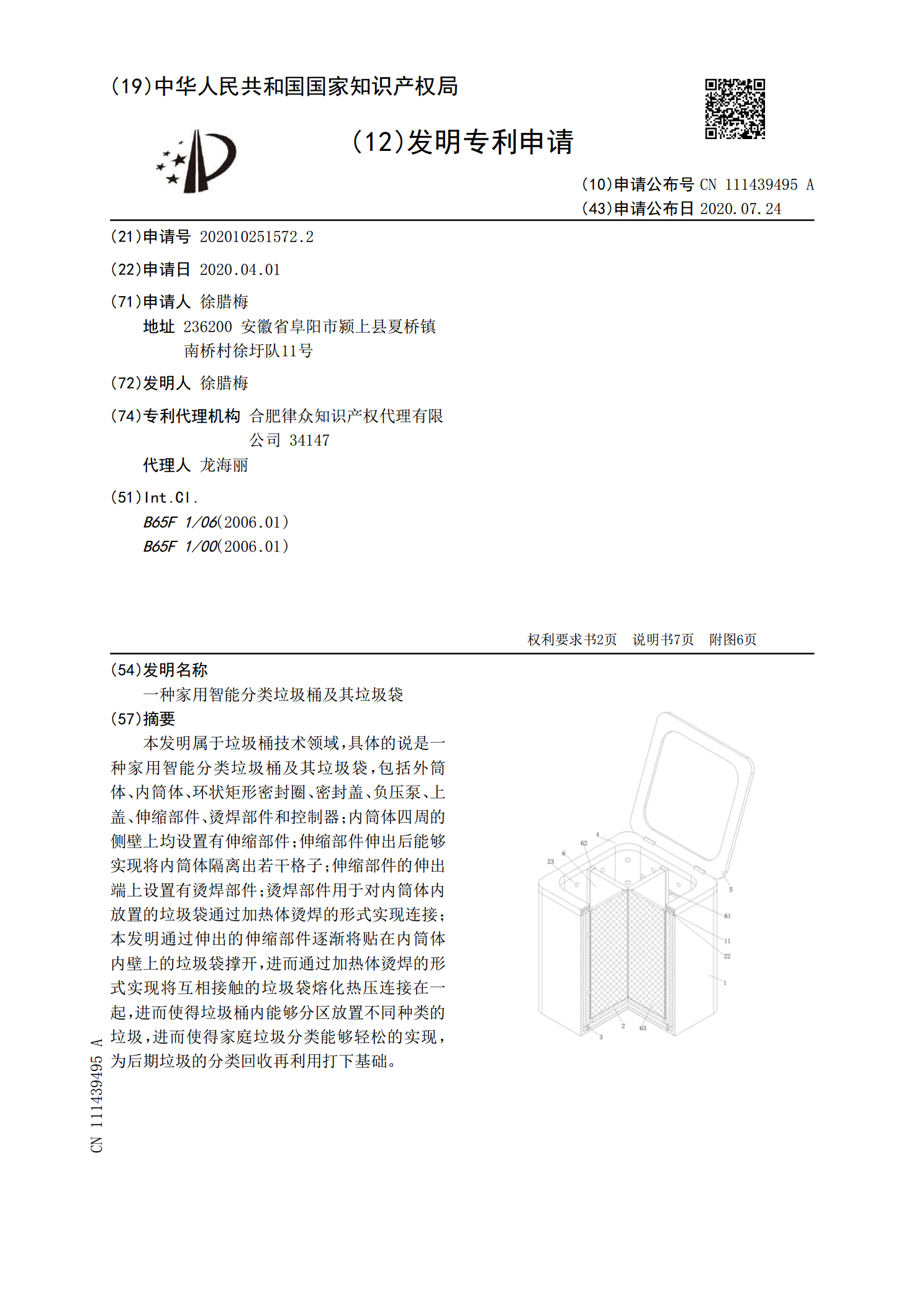
一种家用智能分类垃圾桶及其垃圾袋.pdf
本发明属于垃圾桶技术领域,具体的说是一种家用智能分类垃圾桶及其垃圾袋,包括外筒体、内筒体、环状矩形密封圈、密封盖、负压泵、上盖、伸缩部件、烫焊部件和控制器;内筒体四周的侧壁上均设置有伸缩部件;伸缩部件伸出后能够实现将内筒体隔离出若干格子;伸缩部件的伸出端上设置有烫焊部件;烫焊部件用于对内筒体内放置的垃圾袋通过加热体烫焊的形式实现连接;本发明通过伸出的伸缩部件逐渐将贴在内筒体内壁上的垃圾袋撑开,进而通过加热体烫焊的形式实现将互相接触的垃圾袋熔化热压连接在一起,进而使得垃圾桶内能够分区放置不同种类的垃圾,进而
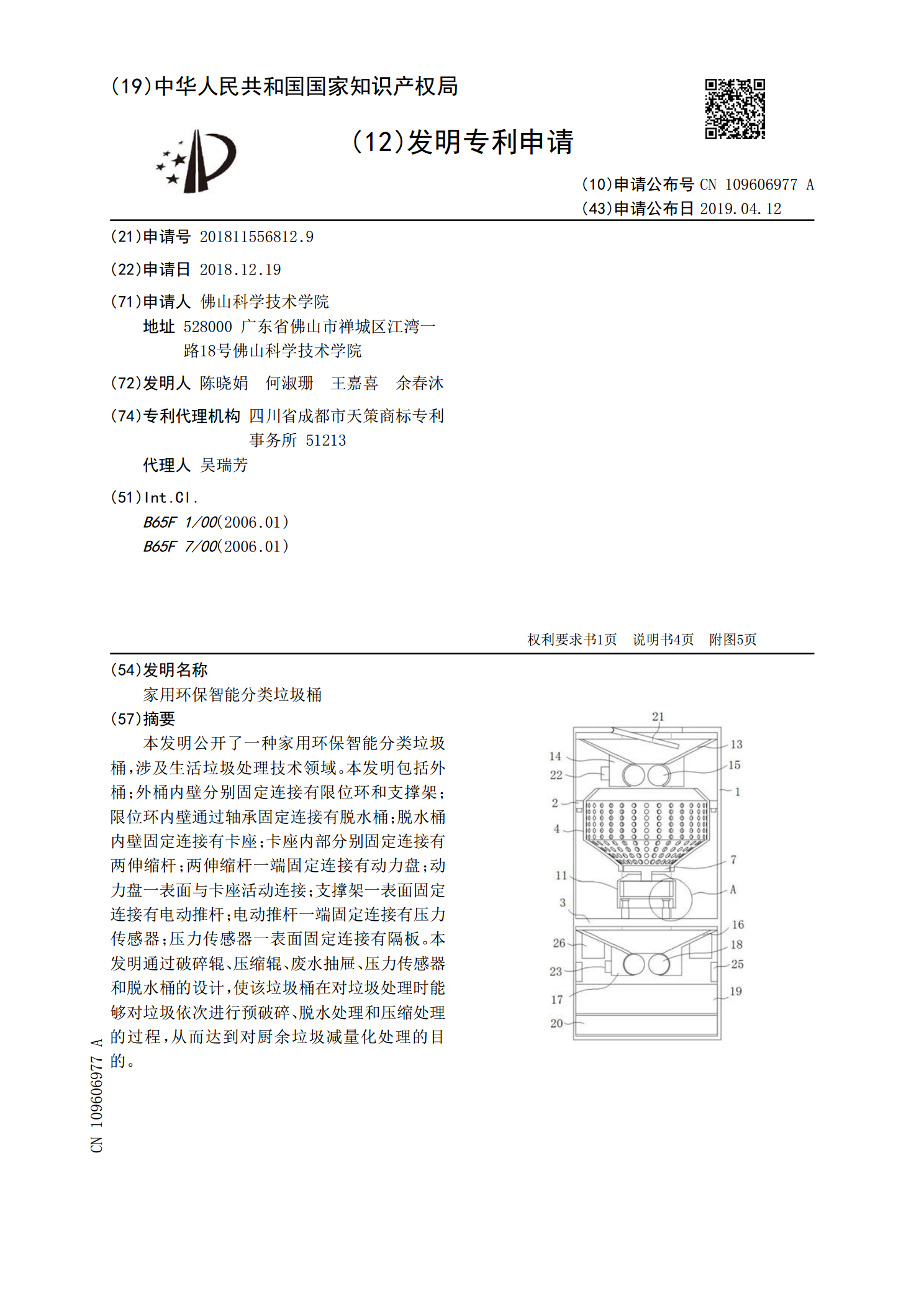
家用环保智能分类垃圾桶.pdf
本发明公开了一种家用环保智能分类垃圾桶,涉及生活垃圾处理技术领域。本发明包括外桶;外桶内壁分别固定连接有限位环和支撑架;限位环内壁通过轴承固定连接有脱水桶;脱水桶内壁固定连接有卡座;卡座内部分别固定连接有两伸缩杆;两伸缩杆一端固定连接有动力盘;动力盘一表面与卡座活动连接;支撑架一表面固定连接有电动推杆;电动推杆一端固定连接有压力传感器;压力传感器一表面固定连接有隔板。本发明通过破碎辊、压缩辊、废水抽屉、压力传感器和脱水桶的设计,使该垃圾桶在对垃圾处理时能够对垃圾依次进行预破碎、脱水处理和压缩处理的过程,从
一种自动分类的智能垃圾桶.pdf
本专利公开了一种自动分类的智能垃圾桶,包括桶身部分,支撑架部分,分类装置部分,桶盖部分和信息采集处理系统部分。一种自动分类的智能垃圾桶整体为长方体形状,内含4个垃圾内桶,其作用分别是储存厨余垃圾、其他垃圾、可回收垃圾、有害垃圾;用户在使用时,首先由红外传感器感应到人体信号,驱动桶盖舵机旋转实现自动开盖,用户丢入垃圾至分类格后,摄像头在经历一定时间后自动拍照,通过所述的控制板带入到神经网络计算得到其分类结果;所述的内桶包含对应不同垃圾类别的4个;得到结果后,控制板向倾转舵机与旋转舵机发送信号,使得分类格水平